“十”字形自驱单元形成寡聚体的动力学行为*
2022-08-12 14:27何景熙秦超然许天亮陈康田文得
物理学报 2022年15期
何景熙 秦超然 许天亮 陈康† 田文得‡
1) (苏州大学软凝聚态物理及交叉研究中心,苏州 215006)
2) (苏州大学物理科学及技术学院,苏州 215006)
1 引言
自组装是自然界创造物质的主要手段.组装是一个系统从无序变成有序的过程,可以发生在不同的时间和空间尺度.分子尺度自组装的一个重要特点是需要分子间弱吸引相互作用[1−9],组装基元在弱吸引作用下自发聚集形成稳定的结构,比如病毒外壳[10]、细胞双层磷脂膜结构[10]等.热运动是促使微观尺度(甚至介观尺度,比如胶体体系)的分子通过扩散运动在空间中寻找到其他分子的主要动力;这类组装过程一般不需要消耗外部能量.随着尺度的增大,热运动效应逐渐可以忽略,比如颗粒物质体系[11,12];这类系统的组装需要不断外部能量的输入,一个典型的例子是沙丘的形成需要风力的驱动.
近几年,随着活性物质系统研究的爆发性增长,科研工作者开始关注自驱动力作用下,系统的组装行为.这类系统由自驱动的单元组成,比如,人类群体、动物群体、活细胞和组织、活性胶体和合成的微型马达.自驱单元具有从周围环境中汲取能量并转换为运动的能力.活性物质系统代表了统计物理中一个全新的非平衡状态.传统非平衡系统的定向驱动力来源于热力学变量或边界条件(如温度和压力)的全局变化,而活性物质系统在单粒子水平上是不平衡的.这一独特的非平衡驱动力与系统固有的随机性结合导致活性物质呈现丰富的集体行为[13−19].自驱单元的形状会显著地影响其组成结构以及组装之后团簇的性质,如圆形的自驱单元会形成有缺陷的紧密六方堆积的团簇[14−16],团簇周边的粒子会不停地进行更迭,形成一个类似液态的相.方形粒子会形成有缺陷的四方堆积团簇[18],与圆形粒子相比,团簇与外界没有粒子交换,形成的相更接近于固态,且方形粒子在团簇中不能轻易改变方向,因此会产生力矩使团簇进行旋转.椭圆形粒子会随着自身横纵比的改变而产生不同的现象[14],当横纵比接近1 时,椭圆形粒子因对称性破缺不会像圆形粒子那样产生大团簇,反而会分布在整个空间中;当横纵比远离1 时,粒子取向的趋同性将越来越明显,由此产生极性向列带.棒状粒子根据横纵比的不同也会有不同的现象[13]:短棒形成小团簇;当短棒变长时,团簇会变大并且产生涡旋;长棒会产生跨区域的条带状团簇.圆锥形粒子会根据自推进力方向不同而有不同的现象[17],当自推进力朝大头时,会产生若干个小团簇,而当自推进力朝小头时,会产生大规模的向列集群.
一个重要的挑战是理解形状对活性物质体系自组装行为的影响.一方面形状会导致相互作用的各向异性,另一方面形状也影响组装体的动力学行为.本文设计了一种对称性较低的“十”字形粒子.从对称性上来看,圆形粒子有着最高的对称性;其次是方形粒子,有着四重对称性;棒状粒子和椭圆形粒子有着二重对称性,圆锥形粒子仅有着一重对称性.“十”字形粒子与方形粒子一样有着四重对称性,但不同的是,“十”字形粒子是一种边缘对称向中间凹陷的粒子.在目前的研究中,很少有描述关于这种边缘对称向中心凹陷粒子的.但在实际应用中,这种形状是十分常见的,一个典型的例子就是齿轮,通过其伸长的臂与其他物件相互作用.在实验中发现,与其他形状的粒子不同,“十”字形粒子可以依靠空间位阻效应与自驱动力协调而自发产生许多构型各异的寡聚体,一部分寡聚体十分稳定,在没有外力的干扰下,至实验结束,它们都维持着自身的运动并且其结构都没有产生变化.研究它们寡聚体(二聚体、三聚体、四聚体)的动力学,是理解此类形状大量粒子组装的第一步.“十”字形粒子与圆形、椭圆、方块粒子相比,由于其有四个臂,其空间位阻效应具有很好的各向异性,同时旋转时对周围的粒子也能产生较稳定的扭矩.相对于微观尺度需要吸引作用,本文强调空间位阻和自驱动力协同效应导致的聚集行为.发现这些构型的行为模式按照几何中心轨迹可大致分为两类:第一类是平动与转动相结合的运动模式,几何中心绕着小圈进行无规则扩散,这一类在构型自驱动力合力为零的情况下出现;第二类是做圆周半径较大的偏心旋转,这一类在构型自驱动力合力不为零的情况下出现.本文第2 节介绍了实验场地与“十”字形粒子的制作,第3 节介绍不同的寡聚体的运动行为,最后进行总结.
2 实验设计和轨迹分析
如图1 所示,采用hexbug 马达[20]作为活性粒子进行实验,hexbug 的尺寸为45 mm×14 mm×17 mm,通过7 号电池供电(图1(a)).hexbug 内置了一个不对称的旋转马达,通过马达产生振动,底部的12 条不对称软腿会在几个振荡周期之后进行定向运动.用PVC 发泡板切割出“十”字形结构(图1(b)),尺寸为6 cm×6 cm×1 cm,每条边2 cm,在四条臂底部扎入针,防止实验中粒子翻倒.为了追踪粒子,在它们上面贴上了识别卡片,卡片几何中心有一个直径1.4 cm 的圆,用于提出粒子坐标.把“十”字形结构用爱牢达胶粘贴于hexbug 马达的背部(图1(c)),作为具有自驱能力的基本组装单元.
实验场地由2.2 m×2.2 m 的玻璃板构成,表面喷上黑色亚光漆,方便粒子识别.边界是由泡沫塑料板制成的八瓣梅花形边界,高5 cm,边界每条圆弧皆为半径40 cm,124°的圆弧.场地长212.5 cm,总面积为32566.60 cm2(图1(d)).预先设想了若干种二、三、四聚体可能的构型(图1(e)—(g)),将它们分别摆放于场地中央并开始拍摄.

图1 实验材料与场地 (a) hexbug 马达;(b) 识别卡片,白点用于提取坐标,数字代表对应部分的尺寸;(c) hexbug 马达与“十”字形结构复合体;(d) 实验场地,数字表示对应尺寸,白色表示梅花边界;(e)—(g) 二聚体、三聚体、四聚体的初始结构Fig.1.Experimental setup:(a) Hexbug motor;(b) identification card,white dots used to extract the coordinate;(c) complex of hexbug motor and“十”structure;(d) experiment field (the white color denotes the plum flower border);(e)–(g) the initial structure of dimer,trimer and tetramer.
拍摄使用的是Basler 摄像头(https://zh.docs.baslerweb.com/aca4024-29um),被放置于场地的正上方,拍摄帧率为每秒钟14.00 帧.拍摄完成后,照片通过ImageJ 处理后用IDL 程序提取卡片上白点的坐标,作为粒子几何中心的坐标.
从实验中可以看出,寡聚体在运动过程中十分稳定.因此,将寡聚体视作刚体来进行分析.主要分析了寡聚体的几何中心的均方位移和寡聚体整体转动的均方角位移.寡聚体几何中心的计算公式:
其中N为聚集体数目;Ri为第i个自驱动单元的几何中心.寡聚体的均方位移(MSD(t))定义为

〈·〉表示时间和系综平均,每个构型分别做了3 次实验,进行系综平均.一般情况下,MSD(t) 正比于tα,α是幂率因子,α2代表弹道运动,1<α<2代表超扩散行为,α1表示正常扩散,α<1 表示亚扩散行为.同理,均方角位移定义为

其中θ(t)表示经历t时刻后转过的角度;β的物理意义,类似于α,表示寡聚体旋转扩散行为.
物理图像上分析,若把寡聚体看作刚体,则其运动应遵从如下平动和转动方程:

其中Fc为一个寡聚体受到的合力,Γ为寡聚体受的总力矩,γt与γr为平动与转动摩擦系数,m和I是聚集体总质量和转动惯量.η(t)与ξ(t) 为噪音导致的随机力,噪音来源于马达的振动,不一定满足涨落耗散定理.需要说明的是,因为实验上很难获得寡聚体的重心,用几何中心代替重心,也就是说几何中心的运动实际上是偏心运动.由于整个实验体系为过阻尼体系,平动与转动加速度皆可视为零,可解出如下方程:

因此从理论上来说,质心轨迹应该作圆周运动,而圆周运动的中心会由于随机力的关系产生波动,接下来将对于不同的构型进行单独分析.
3 结果与讨论
3.1 二粒子体系
如图2(a)所示,二聚体有三种可能构型,分别标记为2-1,2-2,2-3.三种构型几何形状上没区别,唯一不同的是自驱动力的取向.2-1 和2-2 驱动力方向都是反平行的,但自驱力取向之间的垂直距离2-2 是2-1 构型的二倍.2-3 构型中,自驱动力方向相互垂直.首先研究了三种构型的动力学行为,这三种构型几何中心的轨迹如图2(b)—(d),可以明显地看出三种构型都存在偏心旋转.在2-1 与2-2构型的运动中,轨迹显示偏心旋转形成的圆周半径很小(图2(b)和图2(c)),轨迹更多地表现出中心的平动.这主要是由于两个粒子自驱动力相对于几何中心产生的扭矩同向,对整体转动有加强作用;而力的方向平行、反向,相互削弱,最终是轨迹展现出来较快的转动和较慢平动的轨迹图像.实验上,受场地和振动噪音的影响,很难确保两粒子自驱动力大小相等,因此旋转中心会偏离几何中心,中心平动轨迹也有差异.2-3 构型中,自驱动力合力不为零,平动速度会变快,导致偏心旋转形成的圆周半径尺寸变大(图2(d)).
THZ-82A型水浴恒温振荡器,常州润华电器有限公司产品;SPECORD 210 Plus型全自动紫外可见光谱仪,德国耶拿分析仪器股份公司产品;DELTA 320型pH计,梅特勒-托利多仪器有限公司产品。
为定量研究二聚体几何中心的平动动力学,图3(a)给出了其均方位移.对于2-1 构型,几何中心在0
二聚体的转动,可以用角平均位移表征.从图3(b)可以看出,三种构型都以恒定的角速度进行旋转,拟合得到的角速度ω分别约为2.6,3.5,0.9 rad/s.2-2 构型的角速度在三种构型中最大,这是因为这种构型的力矩是三种构型中最高的,如图2(a)所示,假设质量均匀分布,几何中心为其质心,则力矩约为2aF(a为“十”字形粒子边长,F为自驱动力),2-3 构型的角速度在三种构型中最小,这是因为它的力矩在三种构型当中最小,约为0.5aF.值得注意的是,虽然这三种构型的力矩成倍率关系,但是角速度却没有成倍率关系,猜测:一是由于它们底部的hexbug 取向不同,因此转动惯量和摩擦阻尼也不相同;二是因为粒子的质量分布不均匀,几何中心与质心不完全相同.

图2 二聚体构型及运动轨迹 (a) 2-1,2-2,2-3 为三种构型,黄色箭头为自驱力方向,在每个构型右上角标明了旋转方向,⊗ 表示顺时针旋转,⊙ 表示逆时针旋转;(b) 2-1 寡聚体的运动轨迹;(c) 寡聚体2-2 的运动轨迹;(d) 2-3 寡聚体的运动轨迹Fig.2.Structures and trajectories of three dimers.(a) 2-1,2-2,2-3 denote three kinds of arrangements.Yellow arrow is the self-propelled orientation.⊗ means clockwise rotation,⊙ counterclockwise.(b) 2-1 trajectory;(c) 2-2 trajectory;(d) 2-3 trajectory.

图3 (a) 三种构型的均方位移;(b) 三种构型的角均方位移,插图为角平均位移;(c) 三种构型的角速度概率分布,其中点代表实验数据,线条为高斯拟合Fig.3.(a) MSDs for 2-1,2-2,2-3 configurations and their MSADs (b),the inset is mean angle displacement (MAD);(c) angular velocity distribution,where points are the experimental data,lines correspond to Gaussian fitting.
进一步计算了三种构型角速度的分布概率(图3(c)),角速度的计算采用如下公式:

其中T=1.0/14 为每一帧的时间间隔.对三种构型进行高斯拟合,公式为

其中xc表示对应角速度的平均值,σ对应于角速度的方差.其拟合数据如表1.从图3(c)可知,2-3 构型的角速度分布要比2-1 与2-2 构型紧密,这是由于2-3 构型进行圆周半径较大的偏心旋转,所受噪声影响小于其余两种构型.拟合数据和我们用角均方位移给出的结果一致.
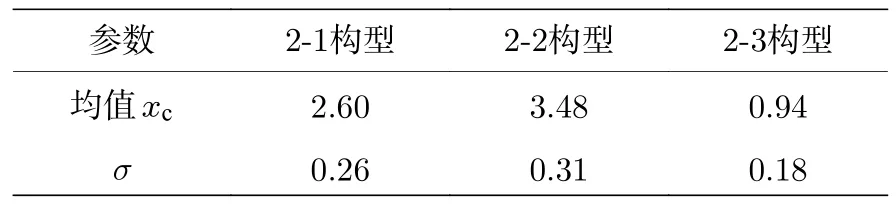
表1 角速度的高斯拟合参数值Table 1.Gaussian fitting parameter value of angular velocity.
3.2 三粒子体系
三粒子的构型比起二粒子多了不少,但是从实验结果来看,在观测时间内能保持稳定不解体的只有图4(a) 所示的四种构型.这四种构型都是从二粒子构型的基础上增加了一个粒子而成的;3-1 与3-2 构型分别是以2-1 与2-2 构型为基础,从侧面插入一个红色粒子;3-3 与3-4 构型是以2-3 构型为基础,分别从不同方向并入一个红色粒子.首先研究了这四种构型的动力学行为,这四种构型的几何中心轨迹如图4(b)—(e).四种构型的自驱动合力不为0 导致它们都在做半径较大的偏心旋转.不过,自驱动力取向不同导致偏心旋转的半径各不相同.值得注意的是,3-1 与3-4 构型的轨迹为朝一个方向螺旋运动,我们猜测是由于场地没有完全水平,使3-1 与3-4 构型受到了重力的影响开始偏移;3-2 与3-3 构型受重力影响较小,从轨迹中可以看出,由于噪声的关系,它们偏心旋转的圆心一直在移动.

图4 三粒子寡聚体构型及运动轨迹 (a) 四种构型,黄色箭头为自推进力方向,在每个构型旁边标明了旋转方向,⊗ 表示顺时针旋转,⊙ 表示逆时针旋转;(b) 3-1 的运动轨迹;(c) 3-2 的运动轨迹;(d) 3-3 的运动轨迹;(e) 3-4 的运动轨迹Fig.4.Structures and trajectories of three trimers.(a) 3-1,3-2,3-3,3-4 denote four kinds of arrangements.Yellow arrow is the selfpropelled orientation.⊗ means clockwise rotation,⊙ counterclockwise.(b) 3-1 trajectory;(c) 3-2 trajectory;(d) 3-3 trajectory;(e) 3-4 trajectory.
为了定量研究三聚体几何中心的平动动力学,计算了它们的均方位移(图5(a)).这四种构型的均方位移都是在短时间尺度上表现为超扩散,在长时间尺度上表现为振荡状态,这是由于这四种构型都在做圆周运动.3-1 构型,在0 图5 (a) 四种构型的均方位移;(b) 四种构型的角均方位移,插图为角平均位移;(c) 四种构型的角速度概率分布及高斯拟合;(d) 四种构型的曲率概率分布及高斯拟合Fig.5.(a) MSDs for 4-1,4-2,4-3,4-4 configurations;(b) MSADs for four configurations,where the inset is mean angle displacement;(c) angular velocity probability distributions and their Gaussian fittings;(d) curvature probability distributions and their Gaussian fittings. 三聚体的转动,可以用角平均位移表征.从图5(b)可以看出,三种构型都以恒定的角速度进行旋转,拟合得到的角速度ω分别为1.01,1.54,0.68,1.95 rad/s.其中3-4 构型的角速度是最大的,并且它的力矩是所有构型中最大的,约为10aF/3;3-3 构型的角速度是最小的,而它的力矩约为aF,是这四种构型中最小的.值得注意的是,3-1 构型的力矩与3-3 构型相同,都为aF,但是3-3 构型的角速度比3-1 构型要小,这是由于两者几何构型不同. 表2 角速度的高斯拟合参数值Table 2.Gaussian fitting parameter value of angular velocity. 为了探究这四种构型所做圆周运动的差别,计算了质心曲率分布的概率.计算曲率的公式为 其中 为了减小误差,时间间隔定为5 帧.四种构型的曲率概率分布如图5(d)所示,将其进行高斯拟合,参数如表3.其中3-3 构型的曲率最小,分布最紧密,猜测是因为其曲率过小,平动较为明显而减小了噪声的影响;3-4 构型的曲率最大.发现对于这四种构型,角速度越大,其运动轨迹的曲率也越大. 表3 转动圆周曲率的高斯拟合参数值Table 3.Gaussian fitting value of curvature. 如图6(a)所示,研究了四粒子的5 种构型.4-1构型以二粒子为基础,在左右两侧分别插入了一个粒子(图6(a)中紫色与蓝色);4-2 构型是四个粒子从不同方向合并在一起的一个类方形构型;剩下三种构型的都是以一个粒子为中心(图6(a)中绿色粒子),其余三个粒子聚集在该粒子上形成的,不同点是4-3 构型与其余两种的几何构型不同,4-4与4-5 构型中心粒子的极性方向不同.首先研究了这五种构型的动力学,其几何中心的运动轨迹如图6(b)—(f).这五种构型轨迹都在进行偏心旋转,但是前四种构型与2-1 和2-2 构型类似,构型中的粒子相对于几何中心产生了同向的力矩,加强了整体转动,自驱动力之间的方向两两反向平行,相互削弱,因此最终轨迹与2-1 和2-2 构型类似,圆周半径很小,表现出来较快的转动与较慢平动轨迹的图像.4-2 与4-3 构型所作的偏心旋转较为明显,进行螺旋运动.4-5 构型其自驱力合力不为0,平动速度较快,展现出了半径较大的偏心旋转. 图6 四粒子寡聚体构型及运动轨迹 (a) 4-1,4-2,4-3,4-4,4-5 为五种构型,黄色箭头为自推进力方向,在每个构型旁边标明了旋转方向.⊗ 表示顺时针旋转,⊙ 表示逆时针旋转.(b) 4-1 的运动轨迹;(c) 4-2 的运动轨迹;(d) 4-3 的运动轨迹;(e) 4-4 的运动轨迹;(f) 4-5 的运动轨迹Fig.6.Structures and trajectories of five tetramers:(a) 4-1,4-2,4-3,4-4,4-5 denote five kinds of arrangements.Yellow arrow is the self-propelled orientation.⊗ means clockwise rotation,⊙ counterclockwise.(b) 4-1 trajectory;(c) 4-2 trajectory;(d) 4-3 trajectory;(e) 4-4 trajectory;(f) 4-5 trajectory. 研究了这几种构型的平动动力学,计算了它们的均方位移(图7(a)).对于4-1 构型,在0 接着计算了五种构型的角均方位移(如图7(b)).从图7(b)可知,这五种构型也是以恒定的角速度进行旋转的.这五种构型的角速度分别为1.96,1.54,1.79,1.79,1.45 rad/s.4-1 构型的角速度最大,这是由于在这五种构型中它的力矩最大,4-2 构型的角速度最小,力矩也最小;值得注意的是,4-3 与4-4构型的角速度一样,几何构型也相似. 图7 (a) 五种构型的均方位移;(b) 五种构型的角均方位移,插图为角平均位移;(c) 五种构型的角速度概率分布Fig.7.(a) MSDs for five structures and (b) their MSADs.The inset is mean angle displacement.(c) Angular velocity distributions for five structures. 为了进一步分析五种构型的动力学,还研究了这五种构型的角速度分布,如图7(c).4-1 构型的峰宽较宽,峰值处角速度为1.70—2.20 rad/s;4-2构型的峰值为1.52—1.55 rad/s;4-3 构型的峰值为1.78 rad/s,4-4 构型的峰值为1.76 rad/s,4-5 构型的峰值为1.44 rad/s.从图7(c)可以看出,4-1 构型的角速度范围最大,原因是三次实验给出的角速度分布差异过大,统计合并后导致出现了平台区;4-3 与4-4 构型的角速度分布较为相似,这是由于它们的构型较为相似. 从动力学的角度来看,寡聚体的动力学与其组装方式有关.自驱动粒子所产生的力矩使寡聚体转动,噪声与自驱动力使寡聚体进行平动.上述所描绘的构型皆存在力矩,因此它们都会进行转动,其中一部分构型自驱动力的理论合力为零,但由于活性粒子因样品不同,因此聚集体会在噪声与自驱动力的作用下表现为转动与平动的耦合,另一部分合力不为0 的构型则呈现为圆周半径较大的偏心转动.我们发现,这些构型在短时间都会因为转圈而进行持续时间为1—2 s 的超扩散运动,且持续时间长短与其角速度有关,在其首次运动大半圈的时间内都会进行超扩散运动,因此各个构型的持续时间与角速度的乘积较为相近,大约在200°.由于实验中的“十”字形粒子有差异且底盘有质量分布不均匀的马达,每种构型的转动惯量难以测量,因此只能大致观测出每种寡聚体的动力学与其构型之间的关系.构型的总力矩越大,转动惯量越小,其角速度也就越大.关于其构型与动力学之间的定量关系(如角速度大小等),我们今后会通过模拟的方法展开进一步研究. 由于这些寡聚体相互之间没有吸引相互作用,粒子之间仅通过自驱动力而结合在一起,因此组装的构型并不都很稳定.图8 给出了两种不稳定的构型.首先是图8(a),构型在运动的过程中绿色粒子与蓝色粒子很容易就会分开,变成两个二聚体.这是因为紫色粒子会给绿色粒子施加扭矩,导致绿色粒子逆时针旋转,脱离聚集体.图8(b)的几何构型和4-4,4-5 构型类似,但是不同的是,图8(b)中绿色粒子施加在紫色、蓝色、红色粒子形成的寡聚体上的力矩和寡聚体本身的转动方向相反,因此在运动过程中绿色粒子容易脱离构型.从这些例子可以看出,构型要想稳定存在,应该要满足一定的条件.在这里我们做出一些猜测:构型中的粒子自推进力方向朝着质心的一般较为稳定,不然构型容易在自驱力方向偏离质心的粒子的作用下解体,如图8(a)构型;构型中贡献负力矩(与原寡聚体转动扭矩相反)的粒子越少,构型越稳定,否则构型中的粒子会在旋转过程中与原寡聚体分开,如图8(b)构型所示.寡聚体的构型不仅影响其动力学,也影响着构型的稳定性.而具体构型与稳定性的关系,今后将进行更进一步的研究. 图8 两种不稳定的四聚体构型Fig.8.Two different structures of four polymers which are instable. 通过这些对于“十”字形寡聚体的研究,可以对大量“十”字形粒子的自组装做出一个大致的预测.“十”字形粒子在运动的过程中首先会相互接近组合成各种寡聚体,一部分寡聚体稳定存在,一部分不稳定的会在运动中解体形成新的较为稳定的寡聚体.接着由于一部分寡聚体会进行半径较大的圆周运动,数个寡聚体会相互接触再组装成新的较为稳定的大团簇,产生新的运动轨迹,再与其他寡聚体进行接触,最终大团簇会吸收大部分的“十”字形粒子,形成一个最大的团簇,完成自组装,产生相分离现象. 本文设计了一种“十”字形活性粒子,发现在实验中这些“十”字形粒子可以形成稳定性很好的寡聚体,而研究这些寡聚体的动力学行为可以帮助我们更好地理解大量粒子的自组装行为.实验研究了它们的运动轨迹、均方位移、角速度、角速度分布概率以及曲率分布概率.这些构型的质心轨迹大致分为两类,第一类的几何构型自推进力合力为0,质心运动为较快转动与较慢平动相结合的运动模式,这是由于实验中有热噪声以及自驱动力有涨落,合力不完全为0,这种类型的均方位移表现为反常扩散;第二类的几何构型自推进力合力不为0,质心运动为圆周半径较大的偏心旋转运动,其曲率与自身构型有关,这种类型的均方位移在小时间尺度上表现为反常扩散,时间长短与角速度有关,通常持续1—2 s.在旋转动力学上,所有的构型都有着力矩,因此也都进行旋转,其旋转速度与其力矩大小和几何构型有关,寡聚体结构的总力矩越大,转动惯量越小,其角速度也会越大.对于三聚体,还研究了其曲率概率分布,发现三聚体的角速度越大,相应地其曲率也越大.寡聚体的旋转平动和转动动力学对于大量“十”字形自驱马达组装行为的影响,将在未来的工作中进行进一步研究.




3.3 四粒子构型


3.4 讨论

4 结论
猜你喜欢
太原科技大学学报(2022年4期)2022-08-18控制理论与应用(2021年11期)2022-01-08汽车与驾驶维修(维修版)(2021年10期)2021-11-05科技风(2021年19期)2021-09-07商用汽车(2021年12期)2021-07-14中国外汇(2019年9期)2019-07-13导航与控制(2019年2期)2019-06-12劳动保护(2019年3期)2019-05-16中学课程辅导·教师通讯(2018年10期)2018-09-04智富时代(2017年7期)2017-09-05