
预测控制系统直接操纵流量调节阀阀位的控制性能评价
2022-08-16 02:51罗雄麟
化工自动化及仪表 2022年4期
汪 磊 许 锋 罗雄麟
(中国石油大学(北京)信息科学与工程学院)
符 号 说 明

模型预测控 制 (Model Predictive Control,MPC)是化工过程控制领域常用的一种先进控制方法,可实现有约束多变量被控系统的有效控制[1~4]。 但是当被控对象为串级多回路控制系统时,预测控制的引入相对地增加了控制系统的反馈回路,从而导致系统响应时间延长。 为了解决此类问题,可以在传统预测控制系统的基础上利用模型预测控制处理多变量系统的能力,达到减少串级回路的目的。 因此,笔者进一步提出利用预测控制的先进控制性能,最大程度地简化预测控制系统结构,以提升预测控制系统的控制性能[5,6]。
由于早期设计MPC控制器时计算机的计算性能有限,并且化工领域被控对象动态响应时间的值往往为小时级[7~9],因此MPC控制器的控制周期为分钟级,通过将被控对象的动态响应时间除以60作为预测控制器的控制周期,以被控对象动态响应时间的25%作为标准设置预测时域[10]。 除此之外,串级回路中包含的PID控制器计算量小,控制周期为秒级,可以实现对底层实际装置的实时控制,因此在预测控制系统中减少串级回路时往往保留串级主回路或副回路,同时实现预测控制器的分钟级控制周期以及PID控制器对流量调节阀的秒级实时控制[11]。 笔者在这一研究的基础上,提出在预测控制系统中由预测控制器直接操纵流量调节阀阀位,以实现减少串级回路数量并以系统阶跃响应的动态跟踪性能与抗干扰能力作为评价指标,分析不同预测控制系统的控制性能。
1 预测控制直接控制流量调节阀阀位的问题分析
由预测控制器直接控制流量调节阀时,可以使图1所示的多回路预测控制系统转变为图2所示的单回路预测控制系统,在最大程度上降低控制系统的复杂度。 其中Gc1(s)、Gc2(s)分别表示串级回路主、副控制器传递函数;Gv(s)为控制阀的传递函数;Gp1(s)、Gp2(s)为主、副被控对象的传递函数;s表示复数变量;θsp表示预测控制器输出操纵变量作为串级主回路的设定值;qsp、uop分别表示串级主、副控制器输出控制变量作为串级副回路与流量阀的设定值, 因此qsp通常表示流量、uop表示阀门开度百分比;q、θ、C分别代表串级副回路、主回路与预测控制回路的被控变量;上标L、H分别表示在预测控制器中设置被控变量的约束下限与上限;F1、F2分别代表进入控制系统回路的扰动变量;Gf1(s)、Gf2(s)为扰动通道的传递函数。

图1 传统多回路预测控制系统结构

图2 预测控制器直接操纵流量调节阀阀位的单回路预测控制系统结构
为实现上述控制系统的转变,达到由MPC控制器直接操纵流量阀位的目的,需要解决两方面的问题。
一方面, 需要改变预测控制的参考模型[12],即将图1中输入量θsp与输出量C的传递函数G(s)转变为输入量uop与输出量{q,θ,C}输出的传递函数矩阵G1(s),以实现MPC控制器输出操纵变量转变为阀门开度百分比的目的[13]。 但是在实际情况中,无法直接改变工业现场的工艺装置来获得流量阀位uop与Ω={q,θ,C}的传递函数矩阵。 因此,可以通过阶跃响应测试法, 在图1的传统预测控制系统上由阶跃响应获得温度设定值输入量θsp与输出量{q,θ,C}的传递函数H1(s)、H2(s)、H3(s),构成传递函数分块矩阵M(s),以及θsp输入与流量阀位uop输出量的传递函数N(s):

再利用传递函数矩阵M(s)、N(s)即可获得被控系统中uop至Ω={q,θ,C}的传递函数矩阵G1(s):

另一方面,由图2可知取消全部串级回路后,如果不改变预测控制分钟级的控制周期,将无法实现对流量阀门秒级的实时控制[14]。 因此,还需改变MPC控制器的控制周期, 即将其缩短为秒级, 在计算机计算性能大幅度提高的情况下,该问题可以在普通计算机上得以解决。
因此,按照笔者提供的设计方法解决上述两方面的问题后, 即可在实物模型上进行验证,探究由预测控制直接操纵流量调节阀阀位的控制系统性能。
2 预测控制跟踪性能评价
为了在理论基础上设计并评价实际控制系统的性能[15],以Matlab/Simulink平台搭建的非线性串联连续搅拌反应釜 (Continuous Stirred Tank Reactor,CSTR)[16]为预测控制被控对象,控制结构如图3所示。 输入为冷却水流量qc与恒定流速为100 L/min的反应物进料流量q, 输出物料通过与进料流量相同的恒定流速输出,因此釜内液位处于理想控制中。 反应釜的主要目的是通过釜内进行强烈搅拌作用使得进料反应物发生放热反应,将反应物浓度被控变量C1、C2分别维持在设定的目标区间内, 并且通过调节冷却水流量qc1、qc2进行热量交换, 达到调节釜内温度被控变量θ1和θ2的目的,主要扰动为反应物进料流量q。

图3 串联CSTR控制结构
在观察预测控制的动态跟踪性能时, 在MPC控制器中设置了浓度被控变量的约束范围[CL,CH],其中CL、CH分别表示浓度C输出的约束下限和约束上限。
串联CSTR通过线性化工具箱获得的两个典型稳态点见表1。

表1 串联CSTR稳态工作点及被控变量
实验中,当系统处于稳态工作点Ⅰ时,在约束范围内改变MPC控制器的浓度设定值C2sp,观察不同预测控制方案下对浓度设定值的动态跟踪性能。
首先建立传统情况下的预测控制系统作为方案一,系统框图如图4所示。 3种方案中MPC控制器及CSTR变量设置见表2。

表2 不同控制方案的MPC控制器与CSTR变量设置

图4 传统预测控制系统架构下的多入多出串联CSTR结构框图
其中,Gqθ(s)、GθC(s)分别为反应釜装置在稳态工作点附近冷却水流量与温度、温度与浓度之间的控制通道传递函数;H1(s)、H2(s)为主、副测量反馈通道传递函数;在第2条串级控制回路中,G′c1(s)、G′c2(s)、G′v(s)、H′1(s)、H′2(s)、G′qθ(s),G′θC(s)分别表示与第1条串级回路中各模块相对应的传递函数。
此时MPC控制器输出操纵变量θsp作为串联CSTR中温度串级主回路给定值,反应釜输出浓度被控变量C反馈回MPC控制器, 达到反馈校正的目的。 并且在浓度C输出达到稳态点Ⅰ时改变MPC控制器的浓度设定值C2sp, 使反应釜2从稳态点Ⅰ重新达到稳态点Ⅱ,此时系统动态跟踪响应效果如图6所示,并且由图6可知,方案一添加预测控制回路时,稳态响应时间由7 min 延长至8 min,即系统串级回路数量的增加将导致系统的响应时间延长。
其次,根据系统结构框图5建立单回路预测控制系统作为方案二,通过式(3)、(4)建立参考模型并植入MPC控制器,使得此时MPC控制器输出操纵变量转变为阀门开度百分比设定值uop(0%~100%), 达到直接操纵流量调节阀阀位的目的。
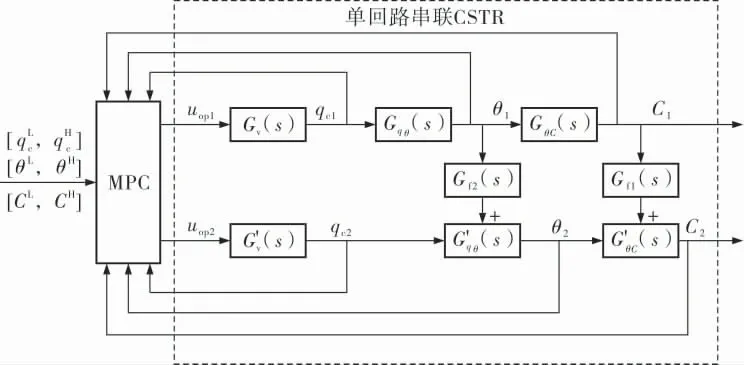
图5 预测控制系统直接操纵串联CSTR流量阀位的结构框图
参考模型具体如下:

在方案二中根据表2设置反应物浓度C与冷却水流量qc的约束区间,并且将二者同时作为预测控制被控变量反馈回MPC控制器。 同样在稳态工作点Ⅰ时改变浓度设定值C2sp使被控变量重新达到稳态点Ⅱ,观察浓度被控变量C2的动态跟踪性能,此时MPC控制器的控制周期为秒级,达到与PID控制器相同的实时控制,跟踪效果如图6所示。

图6 3种控制方案下反应物温度和浓度跟踪性能
由图6可知, 虽然在方案二中可以实现预测控制直接操纵流量阀节阀的阀位,但是取消全部串级回路时未将温度被控变量也纳入预测控制约束区间,将导致温度与浓度的动态响应过程变化较为剧烈, 容易引起稳态点迁移及模型失配,在实际工业现场也不能保证最终产物的纯度。 因此,进一步提出方案三,以解决此类问题。
方案三在方案二的基础上将温度被控变量也纳入预测控制被控变量中, 并且添加温度θ2输出约束。 观察此时预测控制系统的最终输出物料中温度θ2与浓度C2的动态跟踪响应,MPC控制器及CSTR变量设置见表2。
最终3种控制方案的动态跟踪效果如图6所示,可以得出相对于方案一、二,方案三最大程度地利用了预测控制处理多变量、有约束控制系统的先进控制性能,并且在取消全部串级回路的情况下,将所有输出被控变量全部纳入预测控制的约束范围内时,预测控制系统可以取得更好的控制效果。
3 预测控制系统抗干扰性能评价
在以上3种控制方案的基础上可以进一步探究系统的抗干扰性能,通过在系统输出处于稳态点Ⅰ时, 将反应物进料流量q由常量100 L/min转变为在100 L/min附近变化的正弦随机扰动变量,正弦随机变化公式具体如下:

其中,rand(t)表示幅值在0~1的随机数,设置正弦波幅值最大变化增量为±1.5 L/min, 以保证输出浓度在约束范围内变化不过于剧烈,最小正周期设置为17 min, 介于方案一预测控制回路开环动态响应时间的2~3倍, 保证正弦波扰动变化幅度不过于剧烈的同时变化速率也在合理范围内。 最终的正弦随机波形如图7所示。

图7 反应釜进出料流量q的正弦随机变化
当以上3种预测控制系统都处于稳态工作点Ⅰ时,在Simulink平台中同时将3种控制方案中反应釜1的进料q设置为图7中的正弦随机扰动,同时设置反应釜1的反应物出料速率与反应釜2的进料与出料速率与q相同, 保证两个反应釜内液位平稳不变,依旧处于理想控制中。 观察此时3种控制方案中系统的抗干扰性能,最终MPC控制器输出的操纵变量及各类被控变量如图8所示。
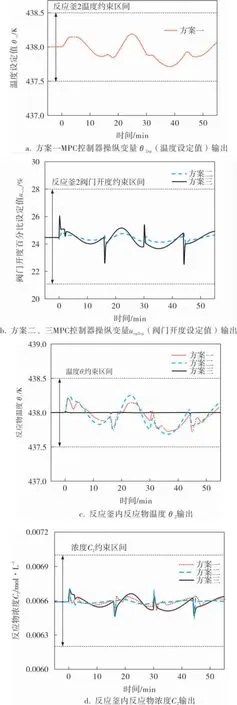
图8 3种控制方案下CSTR内温度、浓度输出情况
通过综合分析图8中的3种不同预测控制方案下的串联CSTR温度和浓度输出曲线可知,为了降低控制系统的复杂度,可以按照方案二由预测控制直接操纵流量调节阀的阀位,但是由于未将温度纳入预测控制被控变量,导致方案二温度输出在减少串级回路时抗干扰效果明显低于方案一。 在方案三中,通过将温度纳入预测控制被控变量,最终输出产品温度的抗干扰效果明显优于方案一和方案二, 并且3种方案的浓度输出皆处于约束区间内,变化幅度较小,验证了方案三具有更佳的抗干扰性能。
综合上述分析可知,方案三在降低控制系统复杂度的同时,也抵消减少了串级回路导致的温度抗干扰效果变差的问题。
4 结束语
针对预测控制系统在引入MPC控制器时控制系统复杂度增加的问题,笔者以串联CSTR为研究对象,给出了由预测控制直接操纵流量调节阀阀位的设计方案,通过动态跟踪性能与抗干扰性能的比较分析,说明该方案相对于传统预测控制系统不仅可以有效降低控制系统复杂度,还可以提高系统的动态跟踪性能与抗干扰性能。
猜你喜欢
遗传(2022年9期)2022-10-10
农业工程学报(2022年13期)2022-10-09
大电机技术(2022年3期)2022-08-06
灌溉排水学报(2022年6期)2022-07-13
煤气与热力(2021年4期)2021-06-09
水泥工程(2020年4期)2020-12-18
环球时报(2020-08-11)2020-08-11
中华戏曲(2020年1期)2020-02-12
