
无人机数据链下行链路的时隙空分复用算法*
2022-08-23 01:53王昭
通信技术 2022年7期
王 昭
(中国电子科技集团公司第十研究所,四川 成都 610036)
0 引言
无人机数据链[1]是无人机系统的神经,作为连接无人机和地面控制站的纽带,具有传输速率高、传输距离远、系统容量大、抗干扰性强等特点,为无人机在军事作战领域的各种应用提供了有力的保障。在无人机数据链中,通常利用下行链路传输无人机平台获取的信息,借助通信网络实现无人机向地面装备分发信息资源[2]。
随着蜂群等密集型无人机应用模式的开展,无人机数据链的组网规模急剧增长[3],从以往的几架,扩充到几十架甚至上百架,而传统频域、时域、码域的研究非常成熟,性能已经接近理论极限,很难满足大规模无人机组网的容量需求,因而需要使用新的方法来突破技术瓶颈。相较于传统的多路复用和多址技术,空分复用(Space Division Multiplexing,SDM)在提高系统容量、提高系统频谱使用效率、降低发射功率、减小用户干扰等方面显示了巨大的潜能,并逐渐成为无线通信技术领域研究的热点[4]。
对于新型的一站多机无人机数据链[5],地面控制站配置多波束相控阵天线,根据期望信号的先验知识,在期望信号的方向上适时地形成多个波束,分别持续跟踪多架无人机的位置变动,并在每个时隙动态地改变波束的方向和形状,从而避免了固定多波束技术中,用户处于波束的边缘时性能下降的问题。文献[6]基于多波束通信系统思想,利用相控阵天线技术引入空间资源,提出了一种基于点波束指向逐包快速调整的空分复用技术。文献[7]以均衡用户排队时延并最大化网络总吞吐量为目标,提出了一种低复杂度的联合时延均衡和功率控制的最优资源管理方法,并通过仿真证明该方法能够大幅提升网络性能。但针对无人机数据链的高动态集群用户组网场景,如何实时动态调度下行链路的波束和时隙资源,控制每个无人机节点的实时辐射功率,提高时隙的空分复用度,并能兼顾各无人机的时延均衡性能,仍是急需解决的瓶颈问题。由于波束分配和功率控制在空间维度上存在强耦合性,而且时隙分配和功率控制在时间维度上相互影响,因此联合波束分配、时隙分配与功率控制的资源管理算法通常具有很高的复杂度。
本文的研究目的是,在地面控制站采用的多波束相控阵天线的无人机数据链中,提出高效的时隙空分复用算法。首先,针对波束空分复用、波束数目限制与节点功率限制等多维约束条件,建模联合波束分配、时隙分配和功率控制的随机优化问题,最大化下行链路的总吞吐量;其次,考虑到目标函数在求解时间平均随机优化的特征,基于李雅普诺夫优化方法,设计了一种低复杂度的联合波束分配和功率控制的时隙空分复用算法(Beam Assignment and Power Control-Space division and Time Division Multiple Access,BAPC-STDMA),并利用该优化问题的非凸数学特征,通过理论推导获得最优解在每个时隙的闭式表达式,从而大幅降低资源分配算法的复杂度;最后在典型场景配置下,仿真对比分析BAPC-STDMA 方法与其他方法的性能。
1 系统模型
本文研究无人机数据链网络的无人机节点到地面控制站的下行链路[2]。地面控制站利用多波束天线以时分多址接入(Time Division Multiple Access,TDMA)的方式同时服务N个无人机节点,灵活调度多波束资源。接收数据时设置每个波束分别指向不同的无人机节点,从而允许在同一时隙内接收多个无人机节点的下行数据,提升网络的下行整体吞吐能力。该系统的模型如图1 所示。

图1 系统模型
地面控制站在调度多波束资源并行接收多路下行数据时,必须要考虑各无人机节点在同个时隙同频复用情况下的相互干扰。时隙资源空分复用分配应在保证地面控制站正常接收各路下行数据的情况下,合理安排每个无人机节点的发送时机与发射功率,尽量提升下行链路的空分复用度,从而提高网络吞吐量。
1.1 输入条件
无人机数据链下行链路的时隙资源空分调度问题是由时隙配置情况、无人机节点构成、各无人机的传输容量需求、各无人机的空间位置分布这4 个输入条件确定。
1.1.1 时隙配置情况
设时隙长度为τ,时隙分配周期为Ts,则分配周期内任意时隙t可表示为t∈{1,2,3,…,Ts/τ}。
1.1.2 无人机节点构成
设N为参与数据链网络的最大无人机节点数,则无人机节点集合U={1,2,…,N}。
1.1.3 各无人机节点的传输容量需求
网络中各无人机均周期产生下行业务消息,只需要地面控制站接收,其余无人机无需接收。各无人机节点的传输容量需求用一维实数向量表示为M=[M1,M2,…,MN],其中Mu表示无人机u的容量需求,单位为bit/s。
1.1.4 各无人机的空间位置分布
各无人机相对地面控制站的空间位置分布,直接影响着下行链路的数据传输能力;距离的差异直接影响下行链路的路径损耗;空间角度直接决定彼此在同一时隙复用时的相互干扰电平。用三维坐标(x,y,z)表示各节点的空间位置,由于考虑相对位置关系,不妨设地面控制站位于坐标原点(0,0,0),任意无人机节点u的空间位置用(xu,yu,zu)表示。
1.2 时隙空分复用分配表示
无人机数据链下行链路的时隙资源空分调度的输出结果包含时隙分配向量、发射功率向量与波束分配向量,分别定义如下:
(1)X(t)=[Xu(t)]u∈U为时隙t的时隙分配向量,其中Xu(t)=1 表示节点u占用时隙t,而Xu(t)=0 表示节点u未占用时隙。
(2)P(t)=[Pu(t)]u∈U为时隙t的发射功率向量,其中Pu(t)表示节点u在时隙t的发射功率。
(3)B(t)=[Bu(t)]u∈U为时隙t的波束分配向量,其中Bu(t)表示地面控制站接收节点u数据时所采用的波束对应的编号。
1.3 假设和约束
根据无人机数据链的实际使用环境,在下行链路时隙空分复用分配中作如下约束或假设。
1.3.1 信道传输模型的假设
假定时隙t内各无人机节点u到地面控制站D的信道状态为G(t)={gu,D(t)}u∈U,其中,gu,D(t)由无人机下行链路的信道损耗模型决定,本文主要考虑空间路径损耗与多径衰落等基本损耗。根据香农公式,可得到无人机节点u在时隙t的传输数据量为:
式中:w为信道带宽;τ为时隙长度;σ2为高斯噪声功率。
1.3.2 空分复用条件和最大波束数目的约束
一方面,要求到达地面控制站信号处理端的有用信号电平与任意一路干扰信号电平的差值必须大于门限值Gth,才能进行空分复用。另一方面,受限于地面控制站天线能力,同一时隙内分配的节点数目必须小于等于波束数目限制Bth。则空分复用条件和最大波束数目的约束可表示为:

式中:D(t)=[Gu,j,D(t)]u.j∈U为波束空分增益向量,Gu,j,D(t)为链路u→D与链路j→D之间的波束空分增益,该增益取决于多波束天线的主瓣增益与旁瓣抑制能力。
1.3.3 节点的功率限制
受限于无人机节点的设备能力,节点的瞬时发射功率不能超过其允许的最大发射功率Pu,max,平均发射功率不能超过门限值Pu,mean,即:

式中:E表示数学期望。
1.4 优化目标
为实现下行数据排队时延的均衡性,每个无人机发送节点u维护一个缓存接入数据的队列,并采用动态接纳控制方法保证队列不溢出。根据排队理论可知,在有限排队时延的条件下,数据队列将趋于稳定状态,从而在时间平均意义上,数据队列的输入数据量等于输出数据量。因此,在队列稳定状态下,可将节点u的吞吐量定义为:

式中:Qu(t)为发送节点u在时隙t时的数据队列长度;ru(t)为队列接纳控制后的入队数据量;Ru(t)为节点u在当前时隙信道模型下的实际传输数据量。
根据上述对单个节点u的吞吐量分析,可以得到无人机数据链下行链路的时隙空分复用分配的优化目标为,在满足波束空分复用条件、波束数目限制与节点功率限制等多维约束条件的基础上,最大化网络总吞吐量,即所有无人机节点的吞吐量之和,其表达式为:

式中:r(t)=[ru(t)]u∈U,P(t)和X(t)为随机优化问题的控制变量。该优化目标是一个典型的多变量紧耦合的复杂优化问题,任意节点在任意时隙的传输数据量大小都受自身信道状态与其他节点功率控制结果的影响。
2 联合波束分配和功率控制的时隙空分复用算法
本节利用李雅普诺夫优化方法[8-9]在求解时间平均随机优化问题上的优势,根据网络的瞬时状态对每个时隙进行分配决策。利用李雅普诺夫优化方法,定义关于时间平均的功率约束的虚拟队列Z(t),并依据李雅普诺夫优化定理[8],构造优化问题P1 的李雅普诺夫优化函数:

式中:S(t)=[Qu(t),Z(t)]为时隙t的队列状态信息。
可推导出优化问题P1 的李雅普诺夫优化函数的上界为:

式中:C为实际传输数据量、接入数据量、功率限制等多重因素决定的常量;V为接纳控制过程中的队列控制参数。
研究式(10)的构成,优化问题P1 的最大值等效于以下两个优化问题P2 与P3 的最小值优化,即:
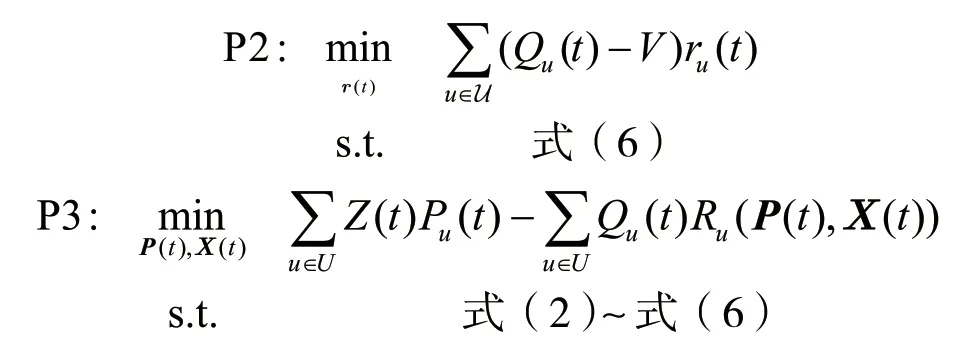
对于P2 问题的最小值优化,参考文献[7],可以依据各用户的数据队列长度对当前到达的数据进行接纳控制,并通过调整控制参数V来限制缓存队列的最大容量,从而保障队列的稳定性。
分析P3 问题的最小值优化,对于每个时隙t,联合波束分配和功率控制的时隙空分复用分配是基于信道状态信息G(t)、波束增益信息D(t)和队列状态信息S(t)到时隙分配向量X(t)和发射功率向量P(t)的映射关系。值得注意的是,P3 的目标函数为非凸函数,因为Ru(P(t),X(t))的信干噪比中,发射功率和时隙分配结果是紧密耦合的。为降低联合时隙分配和功率控制的复杂度,本节点先在初始发射功率下执行时隙空分复用分配,并基于时隙空分复用分配结果,再进行优化功率控制。定义下行链路的无人机初始发送功率向量,其中,且qu是与发送节点u的队列状态信息相关的函数。从而求解基于初始发射功率的时隙空分复用分配向量问题,可等效简化为优化问题P4。

本文采用循环迭代获取最大化调度增益的时隙空分复用分配方法,来求解优化问题P4。定义调度增益ρi(t),用来表示当时隙t调度到无人机节点i时,优化问题P4 的目标函数对应的增值。首先,初始化发射功率向量P0(t)和时隙分配向量X(t)。其次,对于每个节点i,引入辅助向量X(i)(t)以复制当前的向量X(t),设置(t)=1,并计算节点i的调度增益。将向量X(i)(t)代入空分复用条件(式(2))和波束数目限制(式(3))中,如果空分复用条件(式(2))和波束数目限制(式(3))中任一条件不成立,则说明节点i不允许占用时隙t,将其调度增益设置为ρi(t)=-∞;否则,节点i允许占用时隙t,且节点i的调度增益为:

再次,完成各无人机节点的调度增益计算后,选择具有最大正调度增益的节点i的辅助向量X(i)(t)作为当前迭代的输出结果。
最后,当所有节点都没有正调度增益时,结束时隙分配并输出最终时隙分配向量X(t),并针对每个时隙按照占有该时隙的节点号由小到大依次分配波束号,保证共享同一个时隙的节点均分配到互不相同的波束。

在上述过程利用初始功率完成时隙分配与波束分配后,需要进一步对每个无人机节点的功率进行优化控制,以期获得更佳的网络吞吐能力。首先,将基于初始发射功率的计算结果时隙分配向量X(t)代入优化问题P3,并将其转换为仅关于功率控制的优化问题P5。然而,功率控制中各节点发射功率与实际传输数据量的相互耦合关系使得目标函数仍为非凸函数,本文采用连续性凸优化[10]方法来获得功率控制问题的局部最优解。

其中,目标函数的两部分都符合凸函数特征,则有:


利用两个凸函数相减的特征,本文采用持续凸优化的方法来计算其局部最优解。在选定发射功率向量P(t)的初始迭代值等于P0(t)后,依次按照以下计算步骤进行求解:
(1)在进行第k次迭代时,先对函数l(P(t))在点P(k)(t)上的梯度进行求解,其表达式为:
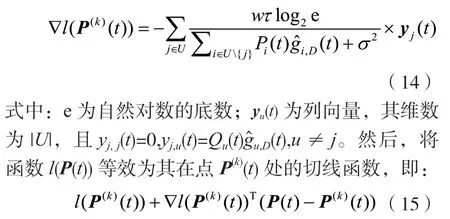
因此,本文将两个凸函数相减简化为一个凸函数与一个线性函数相减的结构,可将优化问题P5的目标函数下界作为凸近似问题进行处理。
(2)循环迭代求解近似后的凸优化问题,获得一个更优的功率控制决策结果,并令P(k+1)将当前结果代入下一次迭代。
(3)令k=k+1,重复执行步骤(1)与步骤(2),进行循环迭代。当算法达到收敛状态后,将最终的作为优化问题P5 的局部最优解进行输出,从而获得优化后的功率分配向量。
至此,本文针对系统模型构建的优化问题,通过对时隙空分复用分配的优化目标逐层分解并依次优化求解,最终得到下行吞吐量最大化的时隙分配向量、波束分配与功率控制向量的各种分配结果。
3 仿真结果与分析
本节通过MATLAB 仿真验证本文提出的联合波束分配和功率控制的时隙空分复用算法(BAPCSTDMA)在网络吞吐量与接入时延上的性能。为对比算法性能,本文将所提算法与另外2 种方法进行对比,这2 种方法为:
(1)基于功率控制的时隙分配算法(Power Control -Time Division Multiple Access,PC-TDMA)。该方法的功率控制方法与BAPC-STDMA 相同,但是,该方法采用纯TDMA 方式,未考虑空分复用,每个时隙仅允许单个无人机节点发送下行数据。
(2)联合波束分配和恒定功率的时隙空分复用算法(Beam Assignment and Fixed Power -Space division and Time Division Multiple Access,BAFPSTDMA)。该方法的波束分配机制与BAPC-STDMA相同,但功率控制采用恒定功率的方式,无人机节点采用相同的功率发送下行数据。
3 种算法在典型场景上独立运行10 000 次,每次运行使用不同的随机种子产生在指定区域的无人机拓扑位置分布。开发环境为MATLAB®2015a,平台环境为Windows 7 SP 1 操作系统,Intel®Core ™i5-6500@ 3.2 GHz 3.2 GHz 的CPU,以及8 GB的内存。
3.1 仿真配置
考虑1 个以地面控制站为中心,高度层为8 000 m、半径为300 km 的圆锥形空域,2~200 架无人机随机分布在高度为4~8 km 的区域内。信道基本参数设置参考外军Link16 数据链[11],工作频率为1 GHz,信道带宽为3 MHz,每个时隙长度为7.812 5 ms。无人机的瞬时功率约束为100 W,平均功率约束为70 W,接收机噪声系数为6 dB,每个无人机的平均业务量为50 kbit/s。信道采用莱斯信道模型,莱斯因子K=10。地面控制站采用多波束相控阵天线,单个波束方位面宽度为10°,俯仰面为30°,平均增益为20 dB。任意两个波束之间的水平投影夹角大于25°时,波束空分增益为50 dB;否则,波束空分增益为0。空分条件约束Gth为20 dB,波束数目限制Bth=4,队列控制参数V=400。在仿真中,针对每个不同无人机节点数目的场景配置,随机生成10 000 次拓扑,在每个拓扑下独立运行3 种算法,每次运行1 536 个时隙,对每种算法下的网络性能进行统计平均。
3.2 仿真结果分析
图2描述了无人机节点数目与网络总吞吐量的关系。
如图2 所示,在无人机节点数目较少时,网络总吞吐量随着无人机节点数目的增加而增加,这是由于输入到整个网络的业务量线性增加。当无人机节点数目超过140 时,3 种方法下的时隙利用率均达到极限值,导致网络总吞吐量趋于饱和状态。此外,对比PC-TDMA 方法,本文提出的BAPCSTDMA 方法充分利用了空分复用带来的增益,成倍增加了网络总吞吐量;对比BAFP-STDMA 方法,本文提出的BAPC-STDMA 方法利用功率控制对空分复用进行联合优化,获得了更高的空分复用增益,进一步提升了网络总吞吐量,在同等条件下容纳更多的无人机节点。
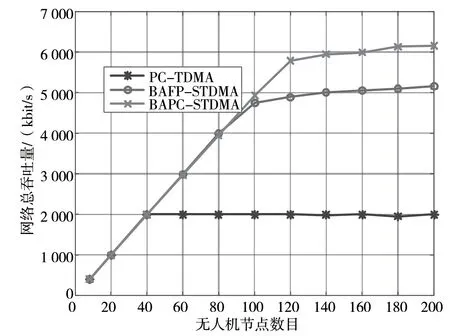
图2 无人机节点数目与网络总吞吐量的关系
图3 描述了无人机节点数目与平均接入时延的关系。
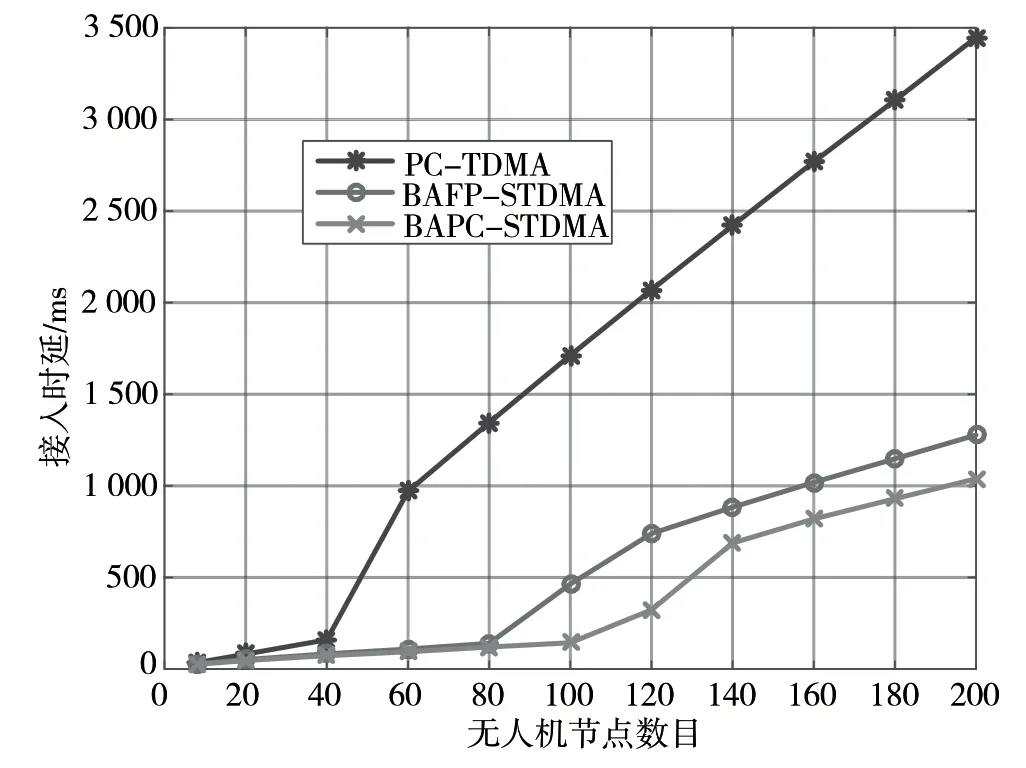
图3 无人机节点数目与平均接入时延的关系
如图3 所示,在无人机节点数目较少时,平均接入时延基本保持恒定,这是由于网络输入的业务量小于网络吞吐能力,数据包在队列中不会产生累积排队时延。当无人机节点数目较多时,随着网络输入业务量的逐渐增大,平均接入时延直线上升。此外,对比PC-TDMA 方法和BAFP-STDMA 方法,本文提出的BAPC-STDMA 方法在无人机节点数目较少时,接入时延性能改善不明显,但在无人机节点数目增大后,接入时延性能得到明显改善,不仅上升拐点大幅推后,上升斜率也有所下降。为满足无人机数据链的接入时延要求,如不大于500 ms,PC-TDMA 最多容纳50 个节点,BAFP-STDMA 最多容纳100 个节点,而本文提出的BAPC-STDMA方法可容纳130 个节点,有效提高了无人机数据链的组网规模。
图4 给出了BAPC-STDMA 算法在无人机节点数配置为100 场景下的某一次运行得到的时隙复用分配结果,时隙分配周期为64 个时隙。

图4 BAPC-STDMA 时隙复用分配结果
从分配结果可以看出,本文提出的BAPCSTDMA 方法支持将同一个时隙分配给多个无人机节点,图中第38 号时隙同时分配给了节点21、49、57、66 共4 个节点,地面控制站分别采用波束1、2、3、4 对应接收节点21、49、57、66 的下行数据,大幅提升了时隙利用率。此外,各节点的时隙分配相对均匀,具有较好的时延均衡特性。
4 结语
在无人机数据链中,优化下行时隙分配对提高网络性能非常重要。本文针对地面控制站配置多波束相控阵天线的无人机数据链网络的下行链路,考虑信道衰落的随机性、业务到达的动态性以及波束空分复用条件,提出了一种低复杂度的联合波束分配和功率控制的时隙空分复用算法(BAPCSTDMA),以期最大化网络总吞吐量,并满足数据队列稳定性与无人机节点的功率约束。仿真结果表明,本文提出的BAPC-STDMA 方法能够显著提升网络总吞吐量并降低接入时延,容纳更多的无人机节点,在无人机数据链的大规模密集组网上具有较强的工程应用价值,为其提供了一种高效的资源分配途径。后续将考虑更复杂的多站多机组网场景,并引入更逼真的多波束天线与信道模型,对时隙空分复用算法开展进一步的研究。
猜你喜欢
中氮肥(2022年1期)2023-01-03
舰船电子对抗(2020年2期)2020-06-23
科技风(2019年31期)2019-12-05
重庆与世界(2019年10期)2019-11-25
中国电气工程学报(2019年3期)2019-09-10
能源研究与信息(2018年2期)2018-12-08
经济研究导刊(2018年26期)2018-11-14
无人机(2017年10期)2017-07-06
现代计算机(2017年5期)2017-03-29
舰船电子对抗(2016年3期)2016-12-13
