
应用于下肢功能障碍者的康复机器人:综述
2022-08-31 03:46周金满
制造业自动化 2022年7期
薛 强,周金满,杨 硕
(1.天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津 300222;2.天津科技大学 机械工程学院,天津 00222)
0 引言
下肢功能障碍者由于神经通路受阻,无法自主完成日常生活基本活动,医学知识表明,重复运动可重新激活患者的神经通路[1]。LLRR将人工智能和机械动力装置结合[2],为患者提供重复、多样的下肢运动,激活神经通路,增强肌肉活力,提高患者自理能力和日常生活参与度[3]。
患者使用传统的康复训练方法需要多个护理人员的帮助,LLRR的使用可以减少护理人员的投入数量,也减轻患者的体力及心理负担。目前的LLRR研究与设计主要集中在理论上,未对样机进行临床实验和专业的医疗评估,受试者的样本量尚且不足;LLRR设备的人机融合性还有待提高;在使用效果方面,LLRR的不利影响尚不明确,例如是否会对肢体造成二次伤害、产生并发症等;不同患者的步态有着不对称性及多变性,LLRR的个性化研究也有诸多困难。
本文综述了先进、有实用性的LLRR,按照其主要功能,分为关节康复、步态康复机器人和日常活动辅助机器人。总结了各类机器人及其应用技术的优缺点,为后续LLRR的研究提供参考方向,也可以帮助下肢残障患者挑选LLRR。
1 材料与方法
目标:总结经学者研究并验证有效、可实际应用的LLRR及应用技术的现状和优缺点,为后续LLRR研究提供参考方向,帮助下肢障碍者了解并选择LLRR。
检索了LLRR相关的文章,检索时间为2020年5月至7月,在以下数据库进行:IEEE xplore,Science Direct databases,Web of Science,PubMed,ASME,SAGE journals,Mendeley,IOS PRESS,The Royal Society,CINAHL。所使用关键词为:“康复辅助设备(Rehabilitation assistive devices)”或“下肢康复(Lowerlimb Rehabilitation)”或“髋关节、膝关节、踝关节外骨(Hip joint,Knee joint and ankle joint Exoskeleton)或下肢康复机器人(Lower-limb Rehabilitation Robot)”。
纳入标准为:直到2020年出版的,与LLRR相关的英文文章。
排除标准为:与搜索主题不相关的、重复的文章,有关盲人行走的文章、以及非英文文章。在此基础上,最初检索到309篇文章,在阅读摘要和应用纳入、排除标准后,去掉了与儿童康复相关的文章,最终评估62篇文章。
2 结果和讨论
2.1 关节康复机器人
髋膝踝关节构成人体下肢运动链,在人体日常活动中有重要作用。髋膝踝关节的一个或多个产生疾病或受伤,都会影响下肢功能,影响生活质量。
髋关节在人体进行步行、下蹲、爬楼梯、坐立转换等动作时皆有着不同的状态和作用[4,5],髋关节受损会使下肢运动范围受限[6],影响正常生活。髋关节康复机器人可以帮助患者改善肌肉力量,提高躯干稳定性[7]。Zhang等[8]开发的髋外骨骼NREL-Exo,可帮助肌肉无力的患者主动行走,保持身体平衡。Ryder等[9]开发的髋外骨骼,当患者的步态轨迹与参考轨迹不同步时,外骨骼会自动迅速调整位置适应患者的状态,可帮助肌肉无力、腿部受伤等患者恢复自然步态,避免了患者疲劳时被动跟随外骨骼运动,减少了对肢体产生二次伤害的可能。
膝关节在人体的下肢运动过程中有支撑体重、辅助下肢摆动和吸收冲击的重要作用[10],是最容易受伤的下肢关节[11]。膝外骨骼可以帮助患者行走[12,13]、进行坐立转换[14]。Kashif等[15]设计的膝外骨骼,如图1所示,可根据肌电信号识别患者意图,控制步行轨迹。如图2[16]及图3[17]所示的多中心结构膝外骨骼,可为患者提供真实真实自然的下肢运动,减少人机之间的不对准。Zhang等[18]提出一种柔性膝外骨骼,如图4所示,采用IMUs测量膝关节角度信息,为患者膝关节助力,降低步行代谢成本。

图1 EICoSI 外骨骼的主要结构[15]

图2 膝外骨骼模型[16]

图3 膝外骨骼的运动范围[17]

图4 可穿戴软膝外骨骼[18]
踝关节支撑着人体的站立、行走、坐立转换等活动,为下肢活动提供了大部分能量[19,20]。踝关节受损会导致患者步态异常、坐立转换出现障碍、身体失衡。踝外骨骼可以辅助患者进行踝关节康复训练,维持人体平衡,完成日常生活活动[21,22]。McCain等[23]设计的踝外骨骼可以完成不同速度的步行任务,改善患者身体的受力情况,保护患者的身体。Liu等[24]使用四连杆离合器开发了能量存储和释放系统,可以在人体的站立阶段储存能量,在其他阶段释放能量,这项技术可以与适当的弹簧机制[25]结合,提高机器人的效率。
3.2 步态康复机器人
步态康复机器人可以辅助患者以正常的步态行走[26],或辅助患者进行骨盆运动、平衡训练[27,28],适用于步态轨迹或关节轨迹异常、下肢力量弱的患者。Chen等[29]提出的“需要时协助”(Assist-When-Needed,AWN)控制策略,可仅在患者需要时提供辅助,有灵活的自适应性。Pan等[30]开发的LLRE如图5所示,利用基于伺服驱动器的多回路调制方法辅助患者的步态趋于正常。Wu等[31]设计的LLRR如图6所示,该设备的髋膝踝关节可调,适用于不同高度的患者。

图5 LLRE系统 [30]
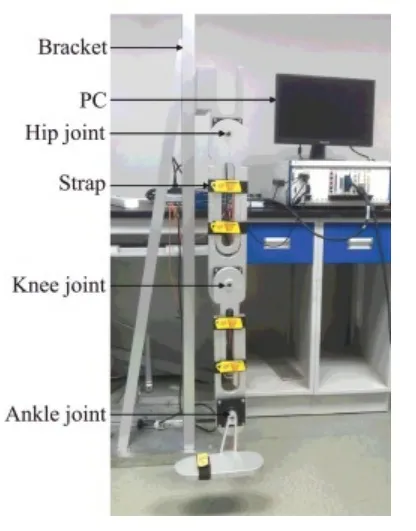
图6 硬件配置[31]
另有一些具有优势的结构及设备,如气动人工肌肉(PAM)可提高设备的舒适性、安全性[32],减轻设备重量、体积、成本,减轻患者身体负担[33,34]。坐/卧式康复机器人可以减轻患者的臀和腿部的体重负担,增加下肢关节的活动范围[35],如图7所示的坐卧康复机器人[36],可以实现参考轨迹自适应柔顺控制,为患者提供有效的康复训练。缆绳/缆索驱动康复机器人可用以进行步态康复训练[37]、人体运动范围的强化和平衡、本体感觉训练[38]。如图8所示的缆绳驱动并联机器人[39],可以完成人体下肢的康复训练任务。

图7 康复外骨骼的机械结构[36]
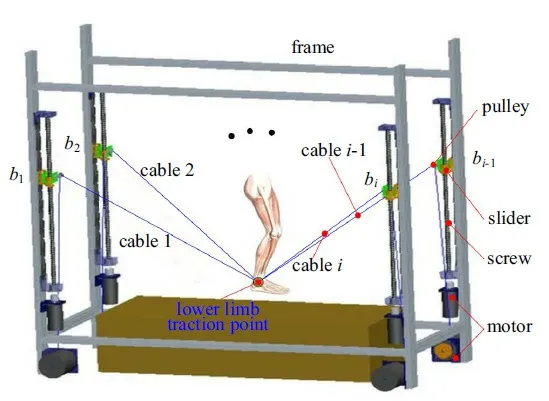
图8 缆索驱动康复机器人[39]
3.3 日常活动辅助机器人
日常活动辅助机器人适用于中风、脑外伤、脊髓损伤患者,肌肉和关节力量不足的老年人,可以辅助患者实现爬楼梯、下蹲、坐到站及行走运动,降低体力消耗[40~42]。
Dong等[43]提出了人类通用出行协助(HUMA)外骨骼,如图9所示,可为患者提供多种行走速度。Li等[44]设计了一种不对称外骨骼,如图10所示,由外骨骼机械腿和可单独使用的智能假肢组成,大腿和小腿长度可以调整,可适应不同的人群。该设计实现了功能模块化,可应用于个性化设置。然而,由于不同患者肢体的不对称性及习惯差异性,相关的理论和技术需要进一步的研究改进。

图9 HUMA及其主要组件 [43]

图10 外骨骼的结构[44]
对于生物体和机器人来说,对环境扰动和变化的感知及响应能力必不可少[45]。已经有学者证明了一些障碍物探测器的实用性[46,47],可代替患者做一些保障身体安全的行动决策。但学者要注意提高探测技术的准确性,以免错误的决策伤害到患者。一些算法或控制方法也可以提高LLRR的人机协调能力:高斯过程学习算法[48]、基于地面反作用力和力矩(GRF/M)的控制方法[49]可以提高力矩预测准确性;自抗扰控制可以改进抗干扰性,提高跟踪性能[50];非线性模型预测控制器[51]可以提高系统稳定性,惯性测量单元[52](IMU)及广义比例积分[53](GPI)控制策略可以检测用户运动意图,实现自适应调整。
3.4 讨论
不管是步态异常的人还是健康人,在实验室和日常生活中的状态是不完全一样的[54]。学者大多在实验室环境下而非生活状态下测试志愿者数据,样本量不足,或许会与患者的期望有偏差。患者在长时间的康复训练过程中要克服机械阻抗,健侧及患侧可能会因此受伤,所以LLRR的柔性也需要进一步提高。
研究表明,长时间使用降低肌肉活动度和能量消耗的LLRR,不利于提升肌肉强度[55],所以患者仍然需进行力量训练,增强对肢体的控制能力和协调能力。此外,由患者意图驱动LLRR运动可以激发患者的参与并加快康复过程[56],可利用脑电信号识别技术,如HAL外骨骼[57]、ATL框架[58]等,进行意图识别,或利用肌电信号[59]识别下肢状态,自适应地实时规划机器人的轨迹。结合功能性电刺激(FES)[60],或针灸治疗[61],可增肌肉收缩力和耐力,矫正患者下肢姿态以及肌肉形态[62]。
由于LLRR技术先进,多数患者无法承受其成本;多数LLRR自重较重,障碍识别、辅助治疗等功能模块的应用会使LLRR的重量增加,虽然可以通过提供扭矩、改变功率等方式来平衡设备的自重或者克服结构阻力,但这也影响着LLRR的工作效率。
4 结语
综合近年来的研究成果,应用于下肢障碍者的下肢康复机器人可从以下几方面进行改进和发展:
1)实验数据来源。LLRR设计过程中使用的步态数据尽量靠近患者的日常生活状态,或在患者的生活状态下采集步态数据,并加大样本数量,使设计具有代表性。
2)改善LLRR的柔性、轻量化设计。可从材料、结构方面进行改进设计,进行轻量化研究,利用转矩控制降低机械阻抗,实现柔顺的人机交互,减少对患者肢体造成二次伤害的可能,并进一步研究以降低转矩脉动和噪音。
3)LLRR的普及。保证训练效果的基础上改善外观设计,应用适当的人机交互界面帮助患者使用LLRR,普及相应的知识,进行专业培训,使更多患者获得康复帮助。
4)意图识别及个性化设置。进行模块化设计,添加肌电、脑电信号识别及障碍识别等功能,识别患者运动意图和肢体状态,以及康复训练环境,根据反馈信息调整设备工作模式,增强适应性,实现个性化设置。
5)多种治疗方法结合。FES或针灸治疗和康复训练结合,提高康复训练的效果,可用FES模拟针灸治疗过程,或根据人体穴位位置在LLRR相应位置设置针灸模块。
6)降低成本。低成本的LLRR会被更多的患者接受,可以扩大普及,为更多的患者提供帮助。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
中老年保健(2021年7期)2021-08-22
发明与创新·大科技(2021年3期)2021-04-30
小哥白尼(野生动物)(2021年12期)2021-03-29
轻兵器(2019年5期)2019-06-21
电子制作(2018年18期)2018-11-14
科学之谜(2018年4期)2018-09-17
家庭医学(2017年8期)2017-09-06
