拍动式仿鹞鲼水下机器人设计及其游动性能试验
2022-09-06 08:42郭松子马俊李志印张进华
中国舰船研究 2022年4期
郭松子,马俊,李志印,张进华
1 中国舰船研究设计中心,湖北 武汉 430064
2 海军装备部 项目管理中心,北京 100071
3 西安交通大学 机械工程学院,陕西 西安 710049
0 引 言
随着工业经济的不断发展,陆地石油、天然气、稀有金属等各类资源日益减少。面对陆地资源日趋枯竭的现状,开发和利用海洋资源是人类的迫切任务之一。为了满足海洋探索和资源开发的需求,近几十年来,各国不断加大水下自主水下航行器(AUV)的研究力度,AUV 领域发展迅猛。传统AUV 多采用由螺旋桨组成的常规推进系统,具有结构紧凑简单、可靠性高、密封性好等优点。但由于螺旋桨工作时会产生大量空泡与旋涡,传统AUV 工作时产生的噪音较大,对环境扰动明显,不利于在对静谧性要求较高的条件下工作[1]。此外,螺旋桨驱动器无法产生矢量推进力,导致本体水下运动时机动性较差,难以满足环境日趋复杂的水下勘探任务。
为了探索不同于螺旋桨推进的其他高效率、机动灵活的水下推进方式,国内外工程师将目光聚焦于海洋中各式各样的鱼类,从鱼类的游动方式中汲取灵感,希望通过模仿自然界中海洋生物的形态特征与游动机理,为研制新型的高性能AUV 提供思路[2]。鲼科鱼类是典型的采用中央对鳍推进的鱼类,拥有优异的流体动力学外形。其自身通过中央对鳍的拍动产生推进力与附加控制力矩,具有水下运动灵活与稳定性好的优点。既能适应远洋的长距离迁徙,又具有低速灵活机动的能力。采用中央对鳍拍动推进的鲼科鱼类逐渐成为工程师在设计新一代水下推进器时不断模仿与学习的对象。
早期拍动式仿生机器鱼的设计多以刚性为主,具有结构可靠性高,产生推进力大等优点。但其也存在诸多不足,例如支撑骨架笨重、游动效率低与环境适应性差等,难以应对日趋复杂的海洋探测任务。早在2004 年,日本学者就研发出了采用拍动胸鳍驱动的仿生鱼原型机。机器鱼胸鳍采用刚性骨架支撑,鳍面使用柔性硅胶板制作。原型样机长约为650 mm,翼展500 mm,重量为640 g,由伺服电机驱动,最大游动速度可达每秒1 倍体长。此后,国内学者Xu 等[3]与Gao 等[4]采用类似的胸鳍结构,设计出采用双侧刚性胸鳍拍动推进的仿蝠鲼机器鱼BH-RAY3,通过水动力学试验研究了其基本的推进机理。德国Festo 公司也以蝠鲼为仿生对象,设计出采用刚性支撑电机驱动的仿魔鬼鱼机器鱼AquaRay,凭借精妙的结构设计和控制方法,该机器鱼能实现水中滑行,极大提升了机器鱼的游动效率。EvoLogics 公司研发了采用人工喷气推进器作为驱动器的仿蝠鲼机器鱼。弗吉尼亚大学和美国海军实验室共同研发的MantaBot 原型样机采用刚柔耦合的设计思路,通过柔性胸鳍内置刚性张拉机构的伸缩来控制胸鳍摆动,能较好模拟真实蝠鲼的运动状态[5]。
随着研究的深入,采用全柔性设计的仿生鱼机器人因其具有结构重量轻、环境适应性强、游动效率高等特点,受到越来越多的学者重视。Chew 等[6]通过水动力学试验发现仿生胸鳍外侧的被动大变形有助于推进效率的提升,并制作了鳍条与鳍面均为柔性材料的全柔性仿生胸鳍[7]。测试结果表明,采用此种柔性胸鳍推进的原型样机MantaDroid 的游动速度最高可达1.7 倍体长每秒,拥有较快的水下游动速度。
通过总结近年来国内外拍动式仿生鱼的研究现状发现,其研究焦点已从刚性鳍驱动转换到柔性鳍驱动,从多自由度的主动变形控制转换到顺应周围水流环境的被动变形设计,机器鱼本体逐步实现了从身体外形相似到运动变形相似,基本实现了对仿生对象“形”和“态”的模仿。现有的拍动式机器鱼样机能完成包括直线游动与定深巡游在内的简单运动功能,但其水下机动性能仍与真实的鱼类相差甚远,严重限制了它们在工程中的应用[8]。
针对上述不足,以研制游动速度快,机动性能高的拍动式仿生鱼为目标,本文将提出一种采用对侧柔性胸鳍拍动推进的仿生机器人(以下简称“机器鱼”)设计方案,并完成相关样机的制作与游动测试工作。制作完成的机器鱼样机(XJRoman)全长385 mm,翼展宽度为550 mm,总质量约为720 g。样机在外形上充分借鉴真实鹞鲼(Eagle-ray)的流线型外形,以减少游动时来自水流的阻力。通过两侧的柔性仿生胸鳍同步或异步地拍动,机器鱼能够实现多自由度的灵活运动,拥有良好的水下机动性。
1 拍动式仿鹞鲼机器鱼的设计与制作
1.1 机器鱼整体设计方案
在充分参考幼年鹞鲼真实的尺寸大小与形态特征后,仿鹞鲼机器鱼样机设计方案如图1 所示。样机整体呈流线外形,全长385 mm,翼展宽度为550 mm,采用一对中央柔性仿生胸鳍驱动,并通过位于后端的水平尾舵调控俯仰游动姿态。机器鱼中间舱段用于容纳包括运动控制板、惯性测量单元与水压传感器在内的多种电子设备,为机器鱼样机游动时的姿态与深度信息提供控制与实时数据反馈。
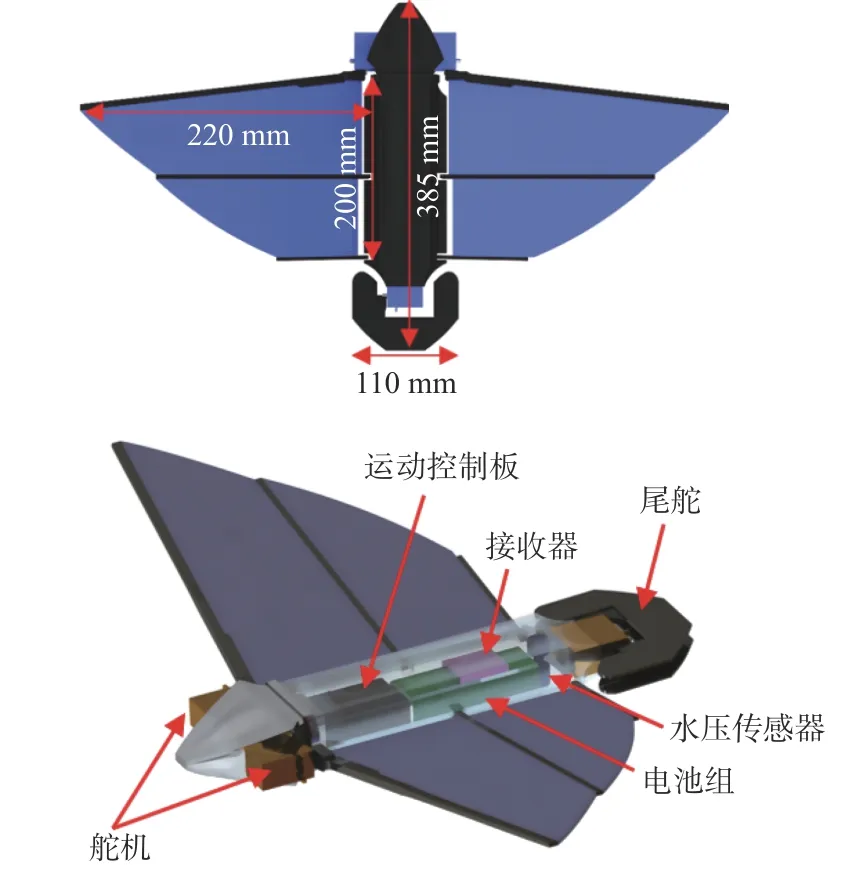
图1 仿鹞鲼机器鱼样机设计方案示意图Fig. 1 Schematic design of the myliobatid-inspired robot
1.2 拍动式仿生胸鳍的结构设计与制作
仿生胸鳍是仿鹞鲼机器鱼样机的拍动推进装置,其结构设计的合理与否很大程度上会影响机器鱼本体的整体运动性能。仿生胸鳍的结构设计既要考虑柔性拍动胸鳍的解剖结构特征,又要便于实现和控制[9]。为指导仿鹞鲼机器鱼柔性胸鳍的结构设计,对鹞鲼胸鳍进行了解剖实验。胸鳍样本整体呈三角旗状,展弦比约为2。在使用外科手术刀剔除胸鳍表面肌肉组织结构后,得到胸鳍内部的骨骼结构,如图2(a)所示。其结构由多根呈放射状排布的钙化辐骨(鳍条)与辐间软组织交叠组成。其中,每根辐骨由多段桡骨通过柔性关节连接,并可绕柔性软骨关节小幅旋转,展现出良好的生物柔顺性。同时,胸鳍相邻两根辐骨之间通过细密的软骨小节连接,一定程度上加强了沿弦长方向的刚性,保证了胸鳍对弦向波形的控制。胸鳍样本的整体厚度由根部至端部逐渐减小,因此其刚度由内至外逐渐递减,如图2(b)所示。
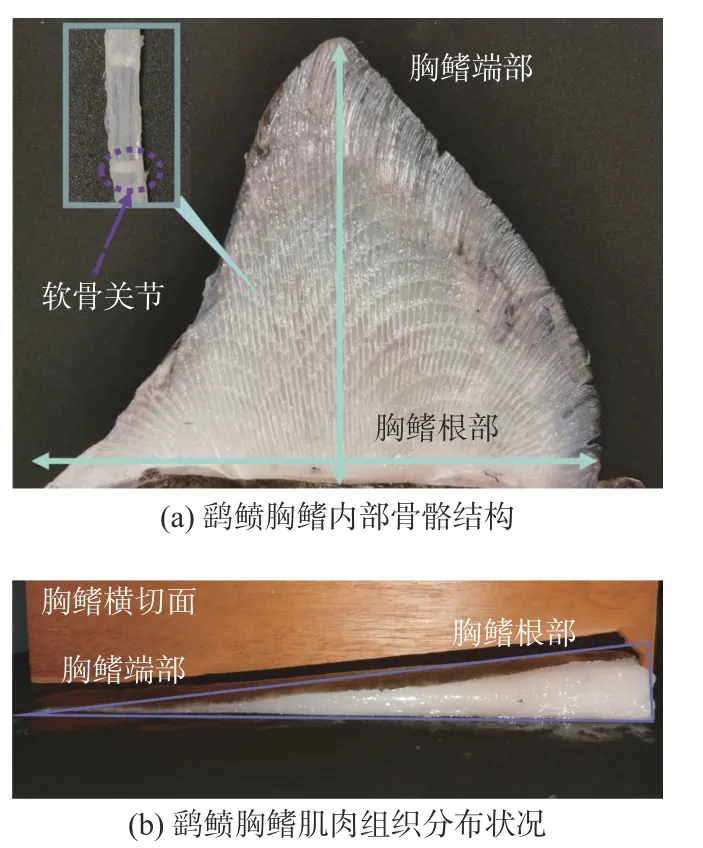
图2 解剖后的鹞鲼胸鳍实验样本Fig. 2 The specimens of a dissected eagle-ray's pectoral fin
通过上述针对鹞鲼胸鳍的解剖学研究可总结出以下结论:
首先,鹞鲼胸鳍整体呈三角旗状,弦展比约为2。胸鳍内部多辐骨的布局与辐骨上的柔性软骨相结合,可保证胸鳍运动时的生物柔性,使鹞鲼能够实现复杂的拍动前进动作,这对其运动的灵活性和稳定性具有较大贡献。
其次,胸鳍沿翼展方向的非均匀刚度分布特点对鹞鲼运动时的胸鳍展向变形具有重要意义。
因此,在后续的仿鹞鲼机器鱼柔性胸鳍的设计中,为达到形态学仿生的目的,应充分借鉴鹞鲼胸鳍的三角旗状外形、多辐骨的布局与翼展方向的非均匀刚度分布的特点。通过类似的辐骨驱动结构,实现胸鳍的周期性往复拍动。
基于上述鹞鲼胸鳍的形态学特征与解剖学特点,本文中试验样机(XJRoman)采用的柔性仿生胸鳍如图3 所示。柔性仿生胸鳍整体由柔性鳍面与柔性鳍条组成。其中3 根鳍条沿体长方向横置排列,其间距为100 mm。前缘驱动鳍条(leading edge)与体长方向夹角为80°,翼展方向长度为220 mm,宽6 mm,厚度由根部6 mm 逐渐过渡至端部1 mm。驱动鳍条的非均匀刚度分布设计,可保证拍动时仿生胸鳍外侧部分的大幅变形;中部及尾部被动鳍条翼展方向长度分别为180 与100 mm,宽度为4 mm。考虑到仿生胸鳍的整体柔性变形需求,3 根鳍条均采用柔性较好的高韧性尼龙(PA12)材料通过激光烧结技术制造,其拉伸模量约为1 700 MPa。尼龙材料的密度与水接近,约为1.13 g/cm3,沿XY方向抗断裂延展率可达20%,能够满足柔性仿生胸鳍对材料机械性能的需求。仿生胸鳍的柔性鳍面采用硬度为30A 的硅胶浇筑成型。其中上部鳍面弦向高度为100 mm,展向宽度为220 mm,厚度为2 mm;下部鳍面弦高100 mm,上端与底部宽度分别为180 和100 mm,厚度为2 mm。
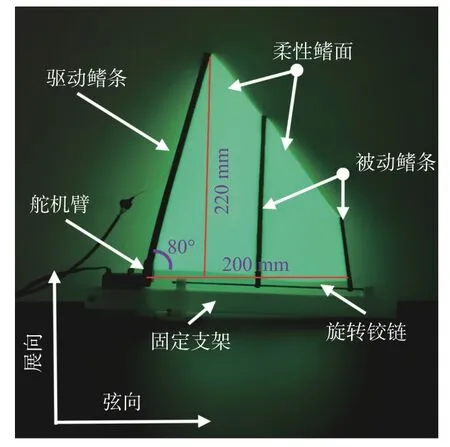
图3 试验样机采用的柔性仿生胸鳍Fig. 3 A bionic pectoral fin adopted by the prototype
整个柔性仿生胸鳍通过位于前缘的驱动鳍条往复摆动,被动地驱动整个胸鳍拍动。同时,仿生胸鳍在拍动时能充分利用自身结构刚度分布的特点,通过被动变形形成的击水角产生向前的推进力。鳍面与鳍条均采用柔性材料制作,鳍面直接与鳍条连接。柔型仿生胸鳍除驱动装置以外,均采用密度与水接近的零浮力柔性材料制作。单侧胸鳍由一个与驱动鳍条相连接的高性能防水舵机驱动,在降低整体质量的同时,最大程度上减少由驱动器引入的机械能损耗,提升机器鱼整体的工作效率。
1.3 机器鱼样机
制作完成的仿鹞鲼机器鱼样机(XJRoman)如图4 所示。整个系统主要由舱体部分、仿生柔性胸鳍、驱动舵机及其内部搭载的电子设备组成。其中,机器鱼舱体部分呈流线型,包含头部舱段、中间舱段与尾舵三个组成部分。上述组成部分均由PA12 尼龙材料通过3D 打印技术制造而成,具有质量轻,强度高的优点。头部舱段与中部舱段间采用可拆卸式拔插设计。当头部舱段与中部舱段扣合后,通过O 型密封圈能有效防水。仿生柔性胸鳍与舱体部分通过柔性旋转铰链连接,并通过位于首部的防水舵机驱动,产生推进力与附加控制力矩。机器鱼的尾舵结构主要负责产生俯仰力矩,调节俯仰姿态角。机器鱼样机整体质量为720 g,与其排水量相当。因此在水中刚好保持零浮力状态。
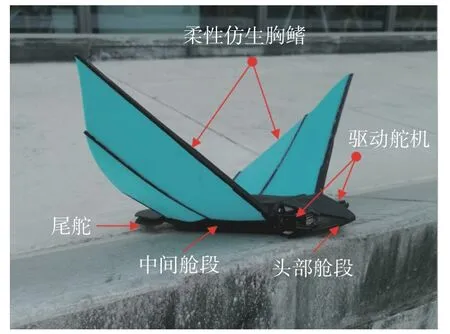
图4 仿鹞鲼机器鱼样机的等轴侧视图Fig. 4 The isometric view of the fabricated prototype (XJRoman)
机器鱼搭载的电子设备如图5 所示,主要包括数据通信模块、姿态感知模块、深度位置感知模块、供电模块及运动控制板。运动控制板由一块STM32F407IG 单片机及一块电源管理芯片组成,能为外围设备提供丰富的接口,其功能主要是负责接收各传感器传输过来的数据,并通过定时器产生相应的脉宽调制(PWM)控制信号,调整舵机摆动角度与速度;无线通信模块通过USART串口与运动控制板连接,将期望的运动指令传输至机器鱼;姿态感知模块与深度位置感知模块通过I2C 串行通信总线与运动控制板相连,并通过运动控制板中的定时器控制数据的采样周期。
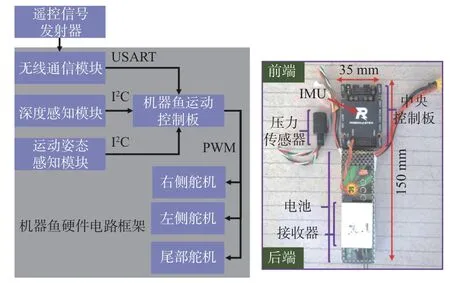
图5 试验样机电子设备链接框图及物理连接Fig. 5 Diagram of the electronic connection of the prototype
自然界中,鲼科鱼通过协调两侧胸鳍的摆动频率切换不同运动步态,实现灵活且平稳的水中运动。对于拍动式机器鱼而言,设计其控制系统不仅需控制各驱动器控制量当前的输出状态,还需要考虑各输出控制量之间的关系对样机整体运动姿态的影响。因此,本文基于生物分层控制的思想,采用中枢模式发生器 (central pattern generator,CPG) 底层驱动方法,通过控制两侧胸鳍与尾鳍所对应驱动器的输出角度与耦合关系。试验样机CPG 底层驱动控制方法示意图如图6 所示。描述CPG 动态特性的数学表达式如下:
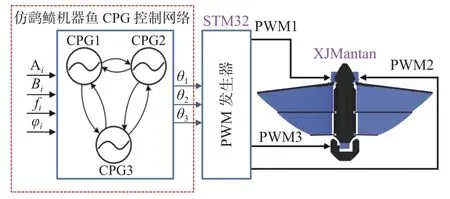
图6 试验样机CPG 底层驱动控制方法示意图Fig. 6 Diagram of the coordinating control method for multiacutators based on CPG
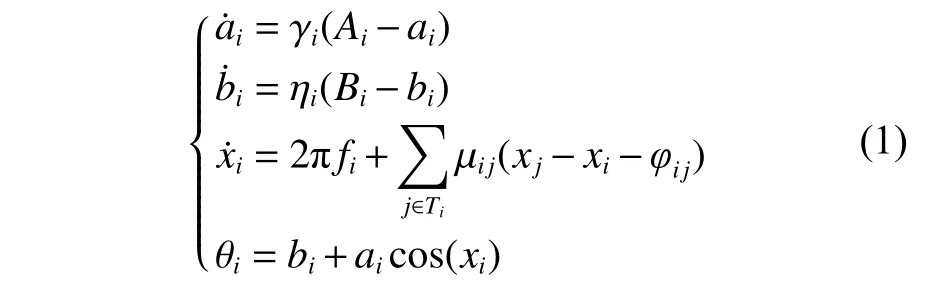
式中:ai,bi和xi为方程中的状态变量,分别代表第i个振荡器当前的幅度、偏移量与相位;i=1,2,3 分别为与仿鹞鲼机器鱼左侧舵机、右侧舵机和尾部舵机相对应的相位振荡器;Ai与Bi分别为第i个振荡器的期望幅度与期望偏移量;γi与ηi分别为幅值与偏移量的收敛系数,决定了方程中状态量ai和bi收敛至期望值的速度;fi为振荡器产生节律信号的频率;μij为第i个振荡器与第j个振荡器之间的耦合系数,决定了对应振荡器之间的耦合强弱;φij为第i个振荡器与第j个振荡器之间的锁存相位差;θij为第i个相位振荡器最终输出的舵机角度。上层PID 控制器仅需通过控制CPG网络入口,即可实现各驱动器间的协调控制。
PID1 控制器以中央控制板中集成的惯性传感器(inertial measurement unit , IMU)采集的偏航角作为反馈信号,通过控制f1与f2左右胸鳍拍动频率的差值,实现游动航向的控制;PID2 控制器则以IMU 采集的俯仰角作为反馈信号,通过调节φ3实现机器鱼游动深度的控制。
2 样机游动性能试验
2.1 试验环境与数据处理
仿鹞鲼机器鱼样机(XJRoman)在50 m × 21 m ×2 m 的试验水域中进行游动性能试验(图7)。试验中使用分辨率为4K 的GoPro-Hero8 防水摄像机对仿生鱼样机的运动实现每秒60 帧的拍摄,随后通过Adobe Premiere 帧处理软件计算出机器鱼的平均游动速度。
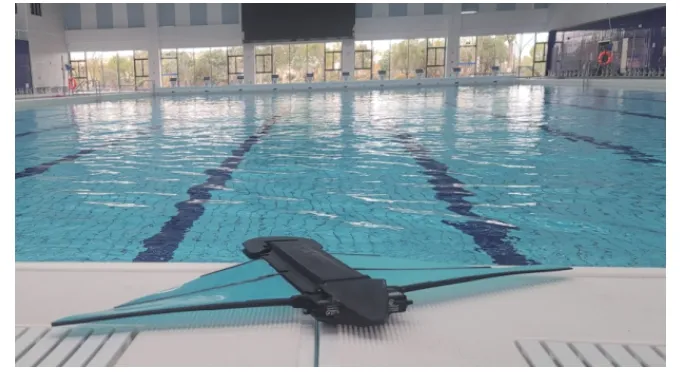
图7 试验样机游动性能测试环境Fig. 7 Experimental environment to test the prototype
2.2 游动速度试验
基于对鹞鲼游动形态的观察,鹞鲼主要通过改变对侧胸鳍的拍动频率实现游动姿态、速度的调节。此外,在静水条件下通过对仿生柔性胸鳍进行的水动力学试验(图8 所示)发现,胸鳍在拍动幅度为80°时各拍动频率下输出推进力较大。继续增加拍动幅度,推进力无明显提升,机器鱼反而将受交替变化的升力影响,游动稳定性降低。
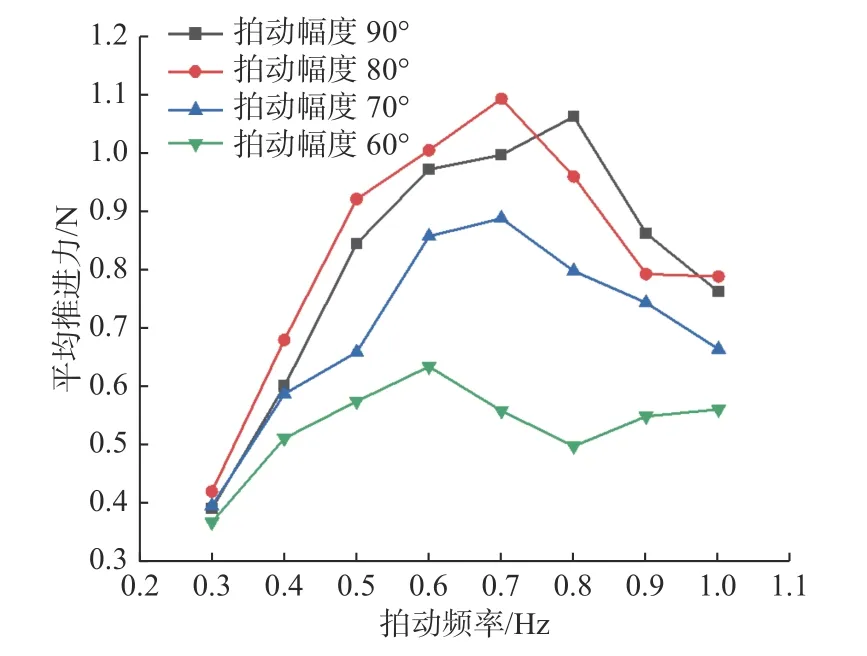
图8 不同驱动参数下仿生胸鳍输出的平均推进力Fig. 8 The average thrust of the bionic pectoral fin under different actuating frequencies and amplitudes
为测试试验样机(XJRoman)的直线游动速度,本文测试了试验样机在胸鳍拍动幅度为80°时不同胸鳍驱动频率下的平均游动速度,测试结果如图9 所示,试验测得的游动速度均以倍体长每秒(BL/s)表示。
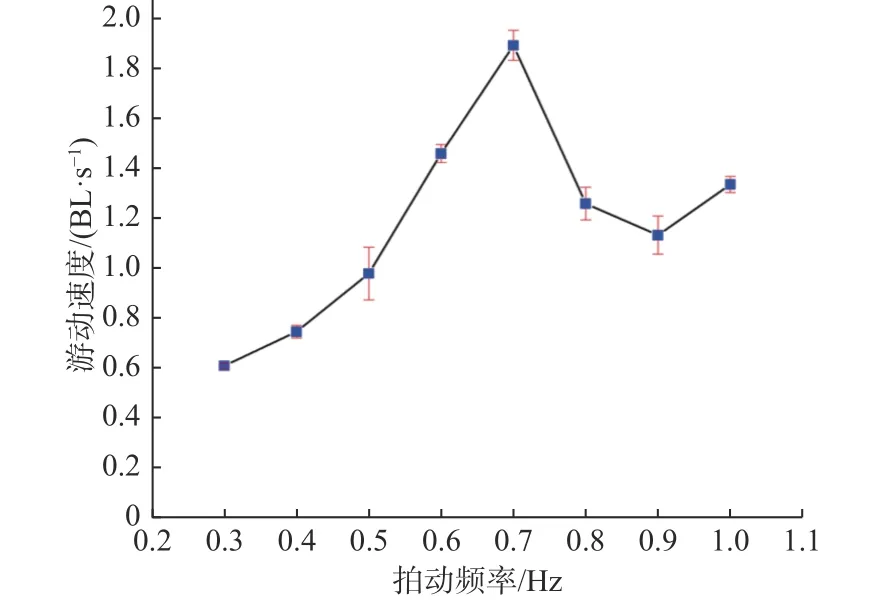
图9 试验样机在不同拍动频率下的平均游动速度Fig. 9 The average speed of the prototype while the pectoral fins being actuated in different frequencies
由图可见,拍动频率的大小对试验样机的游动速度产生了显著的影响。当机器鱼胸鳍的拍动频率低于0.7 Hz 时,试验样机的游动速度随着胸鳍拍动频率的增加而大幅增加,并在0.7 Hz 时达到最大值,约为1.9 倍体长每秒。当胸鳍的拍动频率超过0.7 Hz 后,试验样机的平均游动速度随着胸鳍拍动频率的递增而呈现出递减趋势。在拍动幅度80°时,机器鱼的直线游动速度随驱动频率的变化趋势与仿生胸鳍静水条件下测得的平均推进力随驱动频率的变化趋势基本一致,且最大值点均出现在拍动频率0.7 Hz 处。
2.3 机动性能试验
图10(a)展示了仿鹞鲼机器鱼进行侧V 型机动时的运动图像序列。在游动过程中,胸鳍最大拍幅始终保持80°;左侧胸鳍拍动频率为0.7 Hz;右侧胸鳍拍动频率为0.5 Hz,略小于左侧胸鳍。通过对机器鱼左右胸鳍的差速控制,提升一侧胸鳍所产生的升力与推进力,为机器鱼本体提供横滚与偏航力矩。另一方面,通过调整尾舵的升降幅度,为机器鱼本体提供俯仰力矩。V 型机动成功模拟了真实鹞鲼捕捉猎物时的运动状态,在执行特定目标水域的环境探测以及样本收集任务中具有潜在应用价值。
图10(b)展示了机器鱼完成横滚盘旋机动时的运动图像序列,整个过程可依次分为3 个阶段:加速爬升、横滚与盘旋。首先,机器鱼通过同步拍动两侧胸鳍,加速爬升至一定深度,随后加快左侧胸鳍拍动速度使其本体向右弦横倾,最后协调两侧胸鳍同步慢速拍动以实现平稳的盘旋作动。在本次试验中机器鱼水中盘旋半径约为0.5 m,展现出了灵活的机动性。横滚盘旋机动动作模拟了真实鹞鲼搜寻猎物时的运动状态,可应用于执行对特定目标的侦察跟踪任务中。
图10(c)展示了鹞鲼机器鱼进行下潜翻滚时的运动序列,从运动序列中可观察到,机器鱼在推进力与尾舵提供的俯仰力矩共同作用下,沿逆时针方向进行翻滚下潜。试验结果表明,机器鱼在尾舵与胸鳍的配合下可以在水中实现大角度的翻滚,展现出了优异的垂直机动性能。

图10 仿鹞鲼机器鱼的机动性能测试序列图Fig. 10 Snap shots of the prototype during swimming tests
3 结 语
本文基于鹞鲼的生物解剖特点,提出了拍动式仿鹞鲼机器鱼样机的整体设计方案,并完成了初代原型样机的制作工作。样机由位于对侧的全柔性仿生胸鳍驱动,并依靠尾舵实现俯仰自由度的调控。采用密度较小的高韧性尼龙(PA12)材料代替传统的金属材料制作壳体,降低了整体质量,从而保证了样机水下的机动性。设计的CPG底层驱动方法能有效协调左右胸鳍及尾舵的周期性摆动,提升机器鱼样机游动时的稳定性。通过对仿生机器鱼样机的游动性能测试可知,在保持柔性胸鳍拍动幅度为80°的条件下,两侧柔性胸鳍拍动频率大小的改变对试验样机的游动速度产生了显著的影响。在一定频率范围内,通过增加对侧胸鳍的拍动频率能提升柔性仿生胸鳍输出的平均推进力,从而提升机器鱼样机的游动速度,其最大游动速度可达1.9 倍体长每秒。而当拍动频率超过0.7 Hz 后,增加对侧胸鳍的拍动频率未能有效提升机器鱼样机的游动速度。因此在后续的研究中,实现柔性胸鳍拍动频率的在线监测与控制,使样机处于较高效的工作区间尤为重要。
此外在机动性能测试中,本文所设计的拍动式仿鹞鲼机器鱼可实现侧V 机动、横滚盘旋与翻滚机动等多种敏捷的水下运动,展现出了优异的机动性能。样机在执行水下搜救、探测以及战术打击等任务中具有较大应用前景。
猜你喜欢
建材发展导向(2022年14期)2022-08-19
航天制造技术(2022年2期)2022-05-17
现代企业(2021年11期)2021-12-08
电脑爱好者(2021年18期)2021-09-23
小学科学(2020年11期)2020-03-04
计算机与网络(2018年4期)2018-09-10
中国计算机报(2018年20期)2018-08-28
红蜻蜓(2017年11期)2018-03-09
大陆桥视野·下(2016年5期)2016-07-05
棋艺(2001年7期)2001-06-14