基于双偶极向量场的欠驱动无人船目标跟踪制导方法
2022-09-06 08:42初庆栋尹羿博龚小旋刘陆王丹彭周华
中国舰船研究 2022年4期
初庆栋,尹羿博,龚小旋,刘陆,王丹,彭周华
大连海事大学 船舶电气工程学院,辽宁 大连 116026
0 引 言
近20 年以来,海洋航行器已广泛应用于水文监测、生物检测、航道疏通以及搜索和救援等领域[1-4],其制导和控制已经成为研究的热点问题。根据控制目标的不同,对单一无人船(USV)的运动控制可以分为3 类主要问题[5-6]:目标跟踪、轨迹跟踪和路径跟踪。其中,目标跟踪技术是提高其自主性面临的挑战之一。文献[7]提出了一种直线目标跟踪控制方法;文献[8]针对目标跟踪问题,结合李雅普诺夫稳定性理论和反步法使USV 跟踪到了目标点;文献[9-10]结合A 星路径规划方法,为USV 提供到达目标点的最优路径,实现了目标跟踪;文献[11]基于视觉检测,获得了USV 与目标间的方向及距离,进而跟踪到目标点。然而,传统的USV 目标跟踪技术也存在不足,原因在于:其一,现有技术是根据角度误差来调节制导角速度的,若初始的角速度误差较大,制导角速度会产生较大的暂态振荡和超调,从而影响系统暂态性能[12-13],导致USV 的跟踪轨迹不够光滑;其二,现有制导方法在跟踪到目标点时会出现奇异点,即稳态时航向不能指定[14-15]。
鉴于上述不足,本文拟提出一种基于双偶极向量场的USV 目标跟踪制导方法。根据双偶极向量场原理,设计一种欠驱动USV 的前向速度和艏摇角速度的导引律。然后,通过稳定性分析,以证明控制系统的有界稳定性。最后,通过仿真与实验验证所设计的目标跟踪制导方法的有效性。
1 问题描述
1.1 欠驱动无人船
本文的研究对象为一种双桨推进的欠驱动USV。USV 的运动方程一般是基于地球坐标系和船体坐标系来表示,如图1 所示。欠驱动USV的运动方程由式(1)[1]描述。
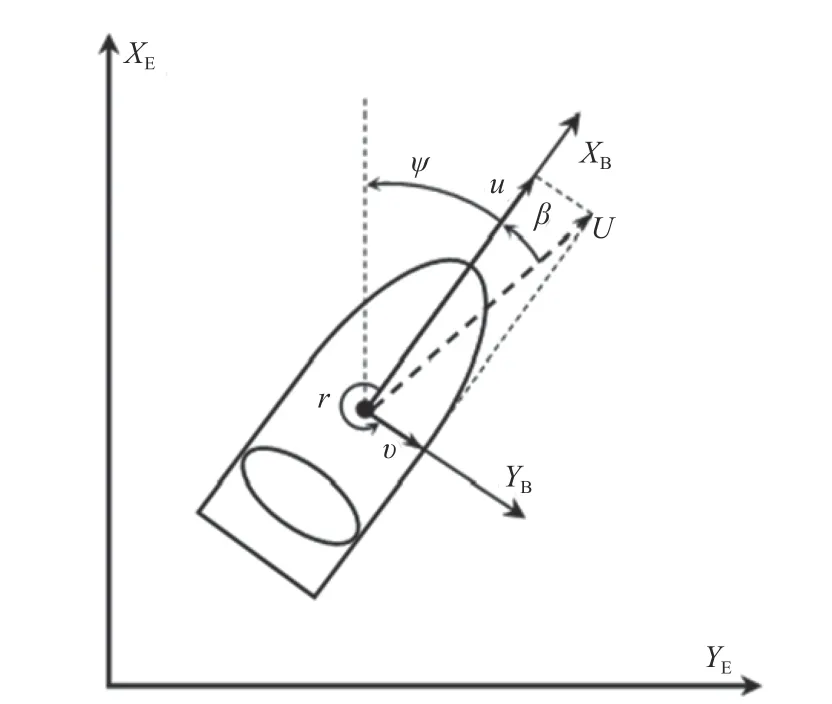
图1 无人船运动的地球坐标系和船体坐标系Fig. 1 Earth-fixed frame and body-fixed frame of AUV motion

式中: (x,y)表示在地球坐标系(XE-YE)下的位置;ψ ∈(-π,π], 表示USV 的航向;u,v,r为USV 的速度状态信息,分别表示USV 在船体坐标系(XBYB)中的前向速度、侧向速度、艏摇角速度。
定义USV 的实际运动速度U=(u2+ν2)1/2>0,实际的运动方向 ψw=ψ+β( β表示侧滑角),则其运动方程可表示为

1.2 双偶极向量场
采用双偶极向量场的概念来设计导引律可以使处于向量场中的USV 跟踪到给定的目标点。图2 所示为USV 跟踪给定目标的示意图。F(p*):R2→R2,采用如下形式表示:
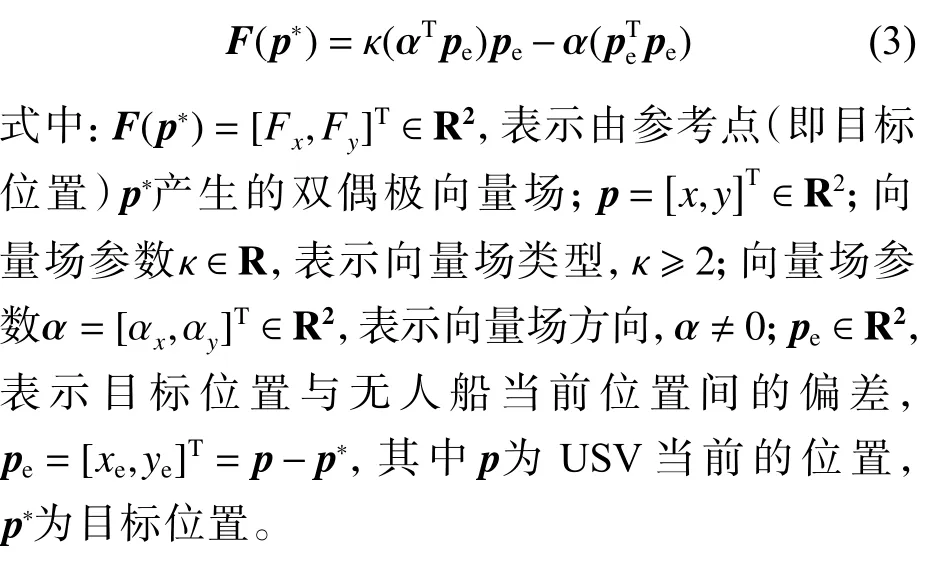
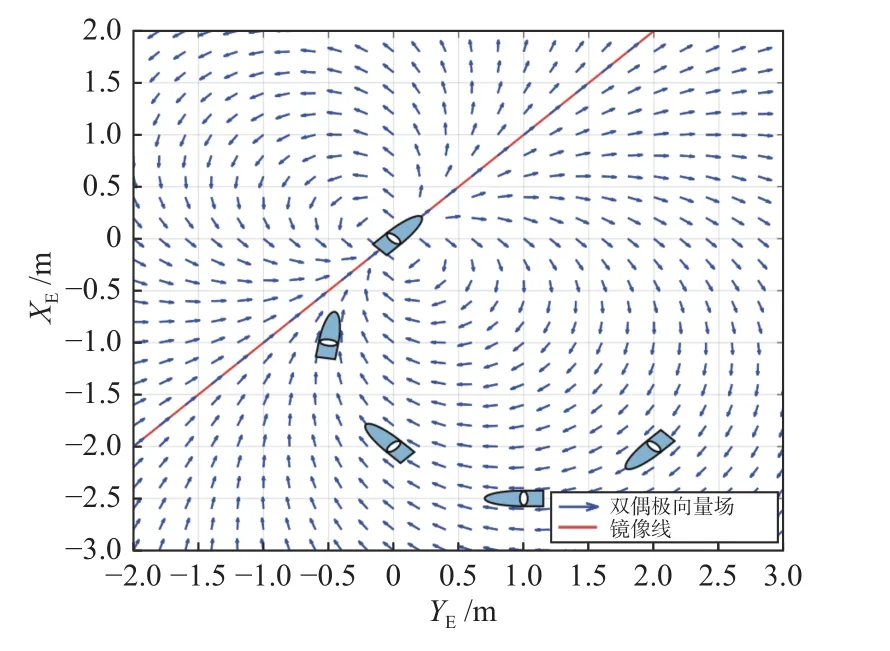
图2 双偶极向量场Fig. 2 Two-dimensional dipolar vector field
双偶极向量场的主要特点是:处于向量场F(p*)内任意一条场线均为一条至目标的路径,内部场线也都是目标点开始至目标点结束。处于双偶极向量场中的USV 都会沿着向量场内部场线到达双偶极向量场的目标点,即沿着光滑的场线跟踪到目标。如图2 所示双偶极向量场,其中,蓝线表示双偶极向量场,红线表示向量场的镜像线,USV 按照向量场的场线跟踪至目标点。
2 导引律的设计和稳定性分析
2.1 导引律设计
为使处于当前位置p的USV 跟踪到目标位置p*,需要设计基于双偶极向量场的导引律。双偶极向量场根据式(3)由下式表示。

航向误差可表示为

式中:USV 当前位置p的 航向 ψc=atan2(Fy,Fx),即表示向量场在 (x,y)位置的方向,这里规定ψc=atan2(0,0)=ψ。
基于双偶极向量场的USV 前向速度与艏摇角速度,可设计如下导引律。

式中:uc,rc分别为前向速度和艏摇角速度的制导信号;ku,kr∈R+,为导引律参数,分别表示前向速度和艏摇角速度的制导增益; ψe为无人船航向与向量场方向间的航向误差; εu,εr为可避免制导信号饱和的参数。
图3 所示为基于双偶极向量场USV 的目标跟踪制导控制框图。
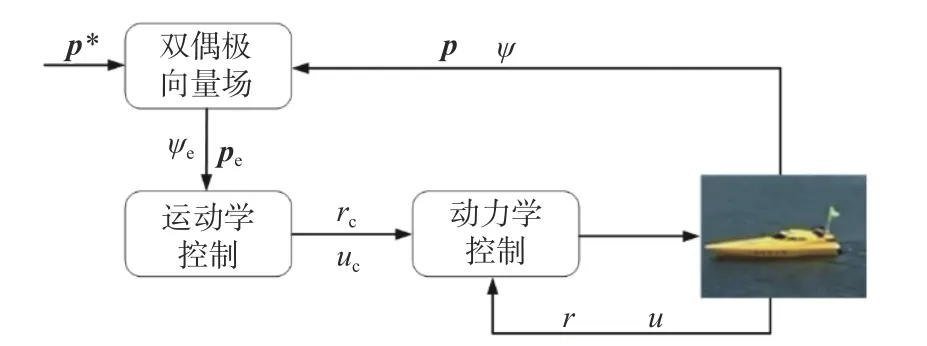
图3 整体控制框图Fig. 3 System structure
2.2 稳定性分析
本节将证明USV 沿着向量场的场线移动并与目标间的跟踪误差最终是一致有界的。
分别对等号两侧进行求导,可得

将航向误差和位置误差代入,可得

化简后,可得
此时,说明USV 正在接近目标位置参考点,故将其代入式(11),可得

3 仿真结果
本节将给出仿真结果以验证所提方法的有效性。仿真使用Ardupilot 软件在环仿真(SITL+MAVProxy),所用程序即为最终实验程序。Ardupilot 固件本身已很完善,故未对其修改,而是直接作为底层使用,上层则为前文所述基于向量场的制导算法。在ubuntu16.04 系统上进行编译,加入对比仿真试验以验证所提方法的有效性。对比仿真的目标跟踪导引律如式(17)所示。

式中: ψa表 示无人船航向与实际方向间的误差,ψa=ψ-ψc,ψc=atan2(pey,pex),pe=[xe,ye]T=p-p*。
仿真参数的取值说明如下:向量场参数 κ=2;参考点在半径为15 m 的圆形上移动,速度1.2 m/s;导引律参数ku=0.9,kr=1, εu=1 , εr=1。仿真结果如图4~图7 所示。

图7 目标跟踪制导时制导速度和跟踪船速度仿真结果Fig. 7 Simulations of velocity of guiding and follower with target tracking guidance
图4 所示为向量场制导和目标跟踪制导时的USV(即跟踪船)轨迹对比。由图可见,经过一段时间后USV 都可以跟踪到给定的目标位置点,但红线轨迹(即有向量场制导时的跟踪轨迹)更光滑,跟踪效果较好。
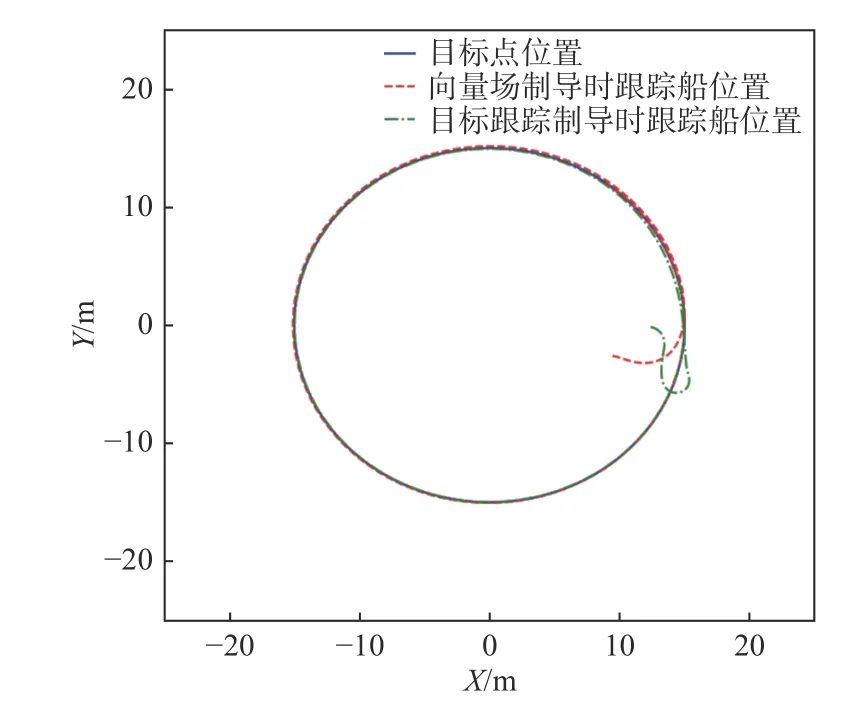
图4 USV 的仿真轨迹对比Fig. 4 Comparison of simulated trajectories of USV
图5 所示为向量场制导和目标跟踪制导时的USV 艏摇角速度对比。由图可见,在有向量场制导下,2 s 时刻USV 的角速度值达到最大-0.4 rad/s,随后逐渐减小,最终稳定在-0.1 rad/s,此时的USV按照固定的方向旋转,航向不会出现振荡; 在对比实验仿真中,目标跟踪制导时在1 s 时刻USV的角速度达到最大值0.9 rad/s,随后出现振荡,在5 s 时刻达到最小值-0.9 rad/s,在角速度振荡时,USV 的航向也会振荡,对应于图中USV 的轨迹不够光滑。经计算,有向量场制导时的超调量是目标跟踪制导时超调量的30%;
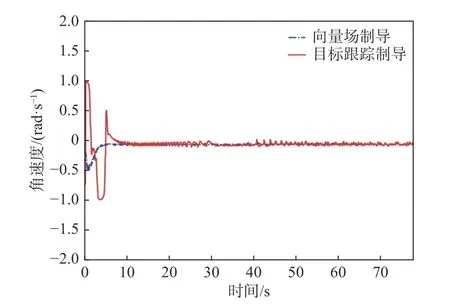
图5 USV 的仿真艏摇角速度对比Fig. 5 Comparison of simulated yaw angular velocity of USV
图6 和图7 分别给出了向量场制导和目标跟踪制导时的USV 速度对比。由图可见,USV 均可以在一段时间后跟踪到制导速度。
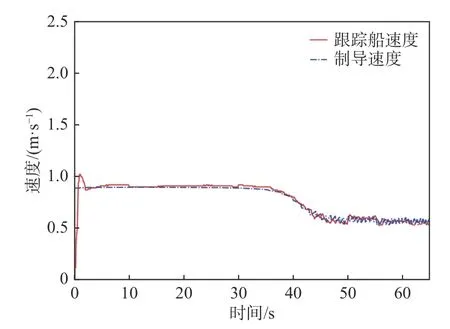
图6 向量场制导时制导速度和跟踪船速度的仿真结果Fig. 6 Simulations of velocity of guiding and follower with vector field guidance
4 实验结果
本文采用实验室的一艘USV 和一台中央监控计算机来验证所提方法的有效性,如图8 所示。USV(即图中跟踪船)的控制器采用的是Raspberry 4B 和Pixhawk,配 有GPS 接 收 器、2 个推进器、2 个电子调速器和WiFi 网桥等通信设备。Pixhawk 内置的姿态传感器可以获得USV 的艏摇角速度和偏航角信息,GPS 传感器可以获取USV 的位置信息和速度信息。2 个推进器用于提供动力。通过网桥组建局域网,与岸基监控系统进行通信,网络的工作频率是2.4 GHz。
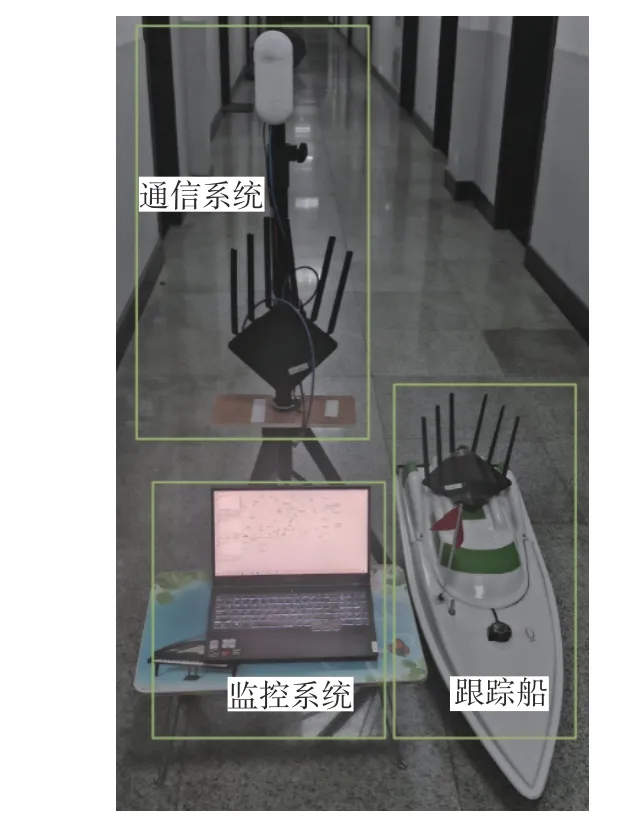
图8 目标点跟踪无人船实验配置Fig. 8 Experimental configuration of USV for target point tracking
以下对前文参数在实验中的取值进行说明。由于算法是在软件在环(software-in-the-loop,SITL)中进行仿真,实验参数与仿真参数取值大致相同。向量场参数 κ=2; 导引律参数ku=1.2,kr=1,εu=1 , εr=1。实验中,虚拟目标点由本地坐标系产生,不在地图上显示。虚拟目标点在半径为10 m的圆形轨迹上运动,速度为1.2 m/s。
图9~图13 所示为根据实验采集的数据绘制成的结果图。
图9 和图10 为目标跟踪制导和向量场制导时的USV 轨迹对比。由两图可见,经过一段时间后USV 都可以跟踪到目标点,但向量场制导的跟踪轨迹没有超调,跟踪效果较好。

图9 目标跟踪制导时的实验轨迹Fig. 9 Trajectory in experiment with target tracking guidance

图10 向量场制导时的实验轨迹Fig. 10 Trajectory in experiment with vector field guidance
图11 所示为USV 的艏摇角速度对比。由图可见,在有向量场制导时,在3 s 时刻USV 的艏摇角速度值达到最大的-0.7 rad/s,随后开始减小,最终稳定在-0.15 rad/s 附近,且始终小于0,即USV会按照固定方向旋转,航向不会振荡;与实验采用目标跟踪制导时的艏摇角速度进行对比,可见USV 的艏摇角速度波动较大,在4 s 时刻达到最大值-0.96 rad/s,随后开始振荡,当艏摇角速度的符号改变时,USV 的旋转方向也会随之改变,并对应于图9 中的轨迹超调部分。经计算,在有向量场制导时,USV 的艏摇角速度超调量为目标跟踪制导时超调量的58%。
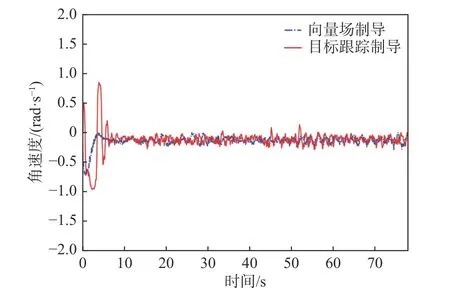
图11 无人船的艏摇角速度Fig. 11 Yaw angular velocities of USV
图12 和图13 所示为向量场制导及目标跟踪制导时的制导速度与USV 跟随速度(跟踪船速度)对比。由两个图可见,USV 的跟随速度均可以跟踪到给定速度,最终给定速度逐渐减小到约1.2 m/s,与目标位置点的速度相近。由于实验所在湖泊存在水草及分布不均匀的情况,在USV 经过水草密集区时,水草会缠绕在推进器上,影响了USV 的航行,这是产生误差的原因之一。总体上,误差是在可接受的控制范围内。
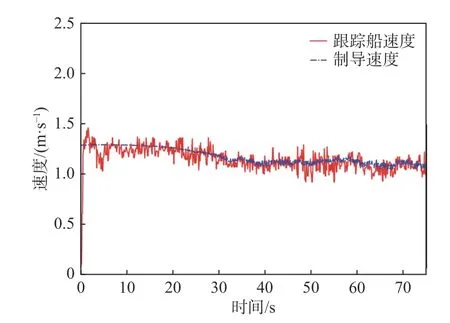
图12 向量场制导时的制导速度和跟踪船速度Fig. 12 Velocities of guiding and follower with vector field guidance
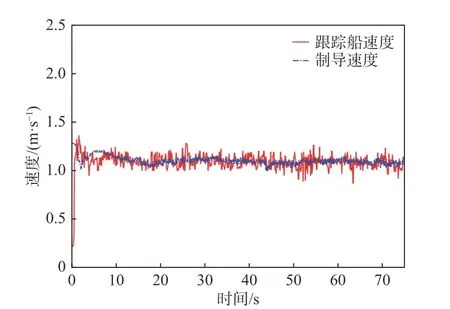
图13 目标跟踪制导时的制导速度和跟踪船速度Fig. 13 Velocities of guiding and follower with target tracking guidance
5 结 语
本文研究了欠驱动USV 的目标跟踪制导问题。首先,根据USV 的运动学模型,设计了一种基于双偶极向量场的艏摇角速度和前向速度导引律; 然后,通过稳定性分析证明了控制系统的有界稳定性; 最后,通过仿真和实验验证了所提设计方法的有效性。结果表明:与传统的目标点跟踪制导方法相比,所提方法因引入了双偶极向量场,USV 可以直接跟踪向量场方向,避免了初始的角度跟踪误差带来的USV 跟踪过程中的振荡和超调,减小了操纵过程中的抖动现象,显著提高了系统的暂态控制性能及航行安全性。同时,在跟踪目标时,能够保持期望的航向,使跟踪目标的轨迹曲线更为光滑,克服了现有方法中稳态航向不能指定的局限性。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
导弹与航天运载技术(2022年2期)2022-05-09
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
当代陕西(2019年17期)2019-10-08
中学课程辅导·教师通讯(2018年10期)2018-09-04
师道(2018年6期)2018-07-16
兵器知识(2018年3期)2018-03-07