基于反演法的移动机器人轨迹跟踪控制
2022-09-13 07:33高继勋黄全振高振东赵媛媛
中国测试 2022年8期
高继勋, 黄全振, 高振东, 赵媛媛
(1. 河南工程学院计算机学院,河南 郑州 451191; 2. 河南工程学院电气信息工程学院,河南 郑州 451191;3. 郑州工程技术学院,河南 郑州 450044)
0 引 言
随着人工智能迅速发展,机器人技术也随之成为当今研究的热点[1]。轮式移动机器人作为机器人的一部分,因其灵活、承载能力大等特点,已被普遍应用于军事、工业、农业等方面[2-3]。
轮式机器人作为一个典型的非线性强耦合控制系统[4],其运动控制模型的建模需要从运动学和动力学两方面进行综合分析与设计。轨迹跟踪作为移动机器人运动控制的核心问题,已有很多研究成果,包括反演控制[5]、反馈线性化[6]、滑模控制[7]等,都是基于模型的非线性控制设计的轨迹跟踪控制系统,并且取得了广泛的应用。Kanayama在Lyapunov第二方法的基础上设计了局部稳定的轨迹跟踪控制器。在此基础上,吴卫国[8]利用反演控制法,设计了全局渐进稳定的轨迹跟踪控制器,但该控制器无法同时完成轨迹跟踪与镇定控制。陈罡[9]在此研究基础上,通过滑模控制与反演控制相结合的方式,完成轨迹跟踪控制。目前,移动机器人的轨迹跟踪控制以多种控制方法相结合为发展趋势,以期望能获得更好的稳定性和鲁棒性。在实际应用过程中,大多数学者的研究是在运动学基础上展开[10],运动学模型在面对高速、重载的情况控制精度无法达到要求,并且系统稳定性无法保证,因此动力学模型的研究对于移动机器人应用具有重要的学术意义和工程价值[11]。
本文基于移动机器人的动力学模型,通过对模型的解耦和分析,利用反演控制方法设计控制律,依据Lyapunov证明系统的稳定和跟踪误差的收敛最终完成移动机器人对理想轨迹速度、角度的跟踪任务。
1 模型建立推导
本文以两轮差速移动机器人为研究对象,且在二维平面内运动时只有滚动、无滑动。移动机器人的模型如图1所示。

图1 两轮差速移动机器人模型
2l为车身宽度,r为轮胎半径,P为移动机器人的质心。为航向角,的方向为移动机器人线速度方向,始终垂直于车轮之间连线,、为左轮和右轮转角,速度矢量可表示为。由文献[12]可知,在o-xy绝对坐标系内,可用动力学方程描述移动机器人动态特性。
根据力矩平衡原理和牛顿定律,对移动机器人及车轮进行分析。


2 控制器设计
反演控制的设计思路是从一个高阶系统开始,在保证系统性能的前提下,将一个非线性系统分解为相应的低阶子系统,然后在子系统中设计相应的控制量。本文通过反演控制方法,分别对线速度和角度进行控制律设计。
定义Lyapunov函数V0:

3 仿真实验与结果分析
为验证控制算法的有效性,分别使用计算机仿真软件Matlab数值仿真和硬件平台构建模拟/物理实验系统进行验证。
3.1 数值仿真
系统状态方程如式(12)所示,选取控制对象为式 (13)、(14),选取系统参数从而可得到系统参数
取参考轨迹,理想线速度vd=1.0 m/s, 理想角度φd=sintrad 。系统参数k1=k2=k3=10,仿真结果如图2、图3所示。

图2 线速度跟踪和角度跟踪曲线

图3 仿真轨迹曲线
图2中,红色实线分别表示理想线速度和角度,蓝色实线分别表示实际线速度和角度。图3为仿真轨迹曲线。由图2可以知,在一定时间内,实际线速度与角度逐渐趋近于理想线速度和角度,并最终保持一致,完成跟踪任务。系统在控制律约束下,仿真轨迹如图3所示。
3.2 实验验证
硬件实验平台部分主要由双轮差速驱动底盘Turtlebot2、IMU模块、GPS差分定位模块(RTK)和主计算机(Jetson Nano)构成,如图4、图5所示。

图4 实验平台实物图

图5 实验平台示意图
Turtlebot2底盘包括ST微控制器,霍尔编码器(500线)和两个直流电机,电机通过微控制器的两个脉宽调制通道独立控制,同时为左、右电机产生控制信号。IMU模块为九轴姿态传感器,可完成对移动机器人航向角、加速度数据的采集,采样频率为20 Hz。GPS差分定位模块(RTK)定位准确度为5 cm,采样频率为5 Hz,并且通过主计算机控制程序实时完成位置记录。主计算机(Jetson Nano)运行Ubuntu操作系统,通过串口与微控制器通信,包含左、右电机速度的信息、移动机器人姿态信息和定位信息。
主计算机通过传感器RTK和IMU完成对移动机器人位姿数据的采集。控制系统通过传感器采集到的数据,对移动机器人下一时刻运动状态进行计算,之后输出对应控制参数给电机驱动,完成对移动机器人运动状态的控制,流程图如图6所示。

图6 移动机器人系统控制流程图
首先,使用移动机器人完成对期望轨迹数据的采集,离线处理后保存到移动机器人主计算机。实验过程中,移动机器人通过对期望轨迹与当前位置误差的计算,得到所需要的控制输入。在移动机器人运动的同时,主计算机会实时将数据保存在本地。由于Nano(2 GB内存)硬件内存不足的原因无法完成位姿在线显示的任务,因此只能通过离线的方式对保存在本地的数据进行处理。
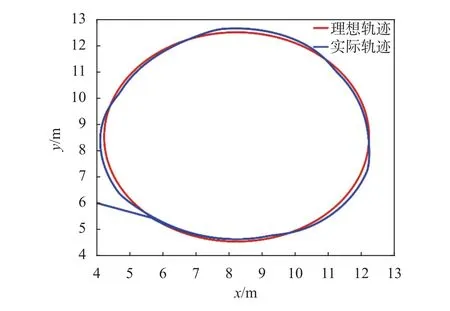
图7 动力学模型实验轨迹跟踪曲线

图8 动力学模型位置误差曲线

图9 动力学模型速度曲线
由图7可知,红色实线为理想轨迹,蓝色实线为实际轨迹,在一定时间内,移动机器人可完成对理想轨迹的跟踪任务。图8为移动机器人实际运动轨迹与理想轨迹随时间变化的误差曲线,误差由初始2 m逐渐减小,最终稳定在0.2 m左右。
为验证本文方法的有效性,使用文献 [12]中以运动学模型为对象的控制方法。同样选取轨迹为半径的圆,令理想线速度,理想角度。移动机器人初始位置为[7 10.5]。实验结果如图10、图11、图12所示。

图10 运动学模型轨迹跟踪曲线
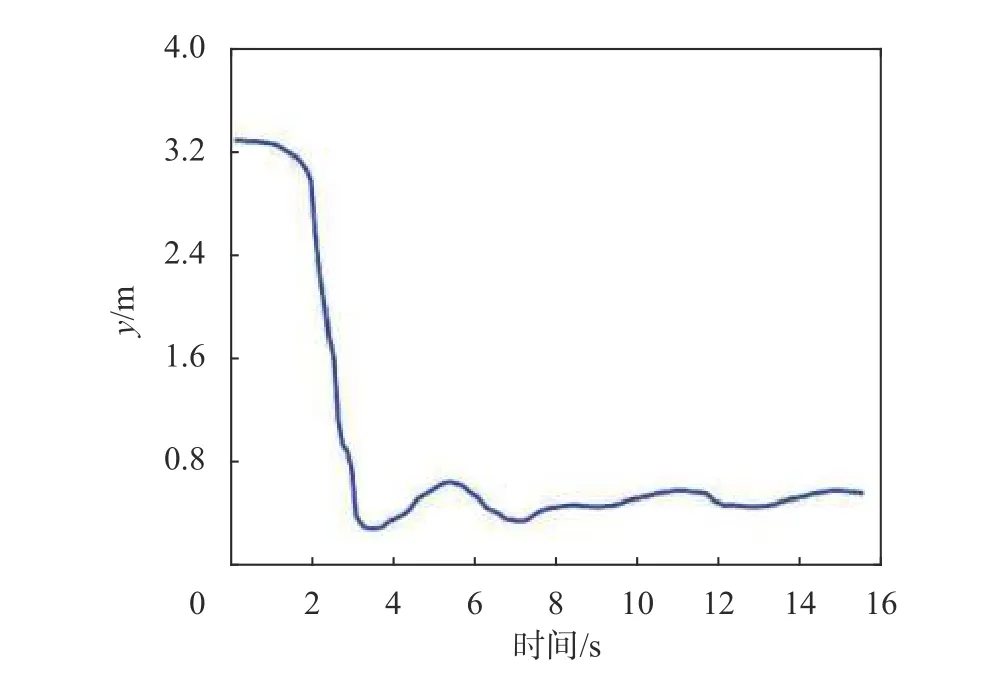
图11 运动学模型位置误差曲线

图12 运动学模型速度曲线
在图10中,红色实线为理想轨迹,蓝色实线为实际轨迹。图11为移动机器人实际运动轨迹与理想轨迹随时间变化的误差曲线,最终稳定在左右。图9所示为移动机器人速度曲线。
将图7、图8与图10、图11对比可知,动力学模型下,移动机器人误差收敛迅速,并且达到收敛速度后较为稳定、误差较小,同时运动轨迹较为平滑。对比图9与图12,动力学模型下,移动机器人响应速度更快,并且控制精度更高;运动学模型下,速度曲线波动较大。
以相同实验对象为前提,对比不同控制模型的实验结果,动力学模型下的移动机器人跟踪误差由0.5 m减小到0.2 m左右,提高了控制精度和准确度更高,同时减小了结构非线性特性的影响,使系统具有更好的稳定性和鲁棒性。
4 结束语
本文根据两轮差速移动机器人模型的运动特征和受力情况,建立动力学模型。针对实际应用问题,对模型进行解耦和分析,利用反演控制方法将控制系统分解为线速度控制和角度控制,分别对移动机器人的速度和角度跟踪进行控制律设计,并利用Lyapunov稳定性理论证明系统的稳定。
通过数值仿真算例,验证了该系统的有效性与稳定性,并且能够保证速度和角度跟踪的精度、收敛速度。最后通过实验,表明了该控制方法在实际应用中的可行性,为以后的研究工作提供了一定的参考和借鉴。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
北京航空航天大学学报(2022年6期)2022-07-02
现代仪器与医疗(2021年1期)2021-06-09
电子技术与软件工程(2019年20期)2019-11-30
电子制作(2019年15期)2019-08-27
考试周刊(2018年95期)2018-11-14
计算机测量与控制(2018年9期)2018-09-19
山东工业技术(2018年5期)2018-03-10
科技创新与应用(2016年34期)2016-12-23
新高考·高一物理(2016年3期)2016-05-18