
基于数据驱动的无线传感器网络拥塞控制
2022-10-06 01:47杨美艳
沈阳工业大学学报 2022年5期
杨美艳
(天津科技大学 人工智能学院, 天津 300457)
无线传感器网络(WSNs)具有规模大、动态性强、自组织网络的特性[1],是当前普遍使用的主要网络结构之一.随着WSNs应用范围的扩展以及应用率的提升,网络负担急速提升.由于WSNs内包含大量节点,各节点缓存资源受限[2],且网络整体带宽较小,结合WSNs网络独特的多对一通信模式,极易造成数据帧堆积在节点缓冲区中,形成网络拥塞问题,导致数据包丢失以及网络吞吐量下降等问题[3],降低WSNs应用性能.因此,研究一种有效的WSNs拥塞控制方法具有重要意义.
当前相关领域专家所研究出来的拥塞控制方法大多以SDN(软件定义网络)数据中心网络为核心实现网络拥塞控制[4].WSNs拥塞在整体上可分为节点级拥塞与链路级拥塞两种类型,前种拥塞描述的是节点发生的流量信息高于自身能力,造成缓存过量与数据丢失等问题;后种拥塞描述的是若干个节点通过使用一个无线信道时,由访问冲突形成的链路利用率与吞吐量下降等问题[5].以SDN数据中心网络为核心的控制方法只考虑节点拥塞的控制,对链路拥塞的控制效果并不显著.
基于计算机科学的数据驱动控制是一种全新的控制理念[6],是控制器控制设计过程中忽略数学模型信息,仅考虑受控系统离线与在线I/O数据与数据处理所得信息,同时基于相应的假定条件实现的一种有效的控制方法[7].针对WSNs节点与链路的双重拥塞问题,将数据驱动控制理念应用其中,提出基于数据驱动的WSNs拥塞控制方法,实现MAC层与数传层相结合的跨层拥塞控制.
1 无线传感器网络拥塞控制方法
1.1 基于数据帧监察的WSNs拥塞判断
在WSNs内监察到附近节点传输数据时,利用被动监察的方式判断WSNs拥塞情况[8].以传输节点A为例进行说明,在其正常传输数据帧功能的基础上,具有被动监察附近节点传输数据帧的功能,可确定这些数据帧的传输节点地址,判断传输节点的活跃度,以此确定节点的拥塞情况,详细过程描述如下:
1) 传输节点A正常传输数据,同时监察附近节点传输的数据帧,分析其数据帧的传输节点地址.MB(A)表示Ts时间内节点A监察到某节点传输数据帧的数量,在设定时间Ts内,每确定节点B输出的数据帧,则MB(A)值加1.

3) 节点A利用式(1)确定最近一个Ts时间内监察到的附近节点传输数据帧次数均值为
(1)
式中,m为数据帧传输节点数量整体值.
4) 由于WSNs内节点拥塞的主要原因为网络状态的不间断性与其他节点对拥塞问题的处理能力[9],因此,分别分析节点与自身历史状态相比的活跃度ξhB(A)和与其他节点相比的活跃度ξrB(A),其表达式为
(2)
(3)
5) 对ξhB(A)和ξrB(A)实施归一化处理,通过式(4)表示利用节点A判断的节点B拥堵度量化值φB(A),即
(4)
在φB(A)值大于1的条件下,可定义节点B未处于拥塞状态;在φB(A)值小于1的条件下,可定义节点B处于拥塞状态,且其值越小,说明节点拥塞状态越严重[10].针对存在拥塞状态的节点,利用离散滑模拥塞控制器进行拥塞控制.
1.2 离散滑模拥塞控制器设计
1.2.1 离散指数趋近率
离散指数趋近率s(k)计算公式为
ps(k)
(5)
1.2.2 自适应离散滑模控制器设计
由于WSNs具有显著的复杂性与时变性[11],因此,在设计控制器完成其拥塞控制过程中引入滑模控制理论.为了确保达到滑动模面上的滑模运行趋于平稳[12],令路由器的队列长度达到期望值标准,控制器离散滑模面可表示为
s(k)=Le(k)
(6)
式中:L为0~1之间的值;e(k)为误差.
根据霍尔维兹多项式标准的定义,判断其是否符合霍尔维兹多项式标准[13].在WSNs处于一阶状态时,L值为0,预期误差为
e(k)=Xd-X(k)
(7)
式中,Xd和X(k)分别为预期输出与实际输出.
二阶离散WSNs状态方程为
X(k+1)=aX(k)+bU(k)
(8)
式中:U(k)为节点在k时刻的离散滑模控制律;a和b为常数项.
(9)
1.3 基于数据驱动的控制策略
针对离散滑模拥塞控制器,根据节点间的关联性设计基于数据驱动的控制策略[14].若WSNs内两个不同节点传输的数据帧同时占用同一信道(即链路拥塞),参考数据驱动理论,依照优先传输节点输出流量小的数据帧,输出流量相对较大的数据帧就近选取其他信道进行传输.
1.3.1 节点独立
在WSNs内节点间不存在关联的条件下,节点的输出可描述为
(10)
式中:X(k+1)=(X1(k+1),X2(k+1))T;Δu(k)=(u1(k)-u1(k-1),u2(k)-u2(k-1));δ1(k)与δ2(k)为WSNs的伪偏导数.
在此条件下,令WSNs输出与预期输出一致,离散滑模拥塞控制器控制策略为
(11)

在式(11)的控制策略下能够实现WSNs实际输出与预期输出的跟踪,使曲线传感器网络达到平稳状态,不会形成拥塞问题.
1.3.2 节点关联
在WSNs内节点间存在关联的条件下,节点的输出可描述为
(12)
式中:σ12和σ21为常数;δ1(k)δ2(k)≠σ12σ21.在此条件下,令WSNs输出与预期输出一致,离散滑模拥塞控制器控制策略为

(13)

在上述控制策略下,WSNs不会产生节点级与链路级拥塞.
2 仿真测试结果与分析
2.1 测试对象
为了验证基于数据驱动的WSNs拥塞控制方法的应用效果,以图1中的WSNs结构为测试对象,针对瓶颈节点7,利用本文方法与传统方法对其进行拥塞控制,验证本文方法的应用效果.
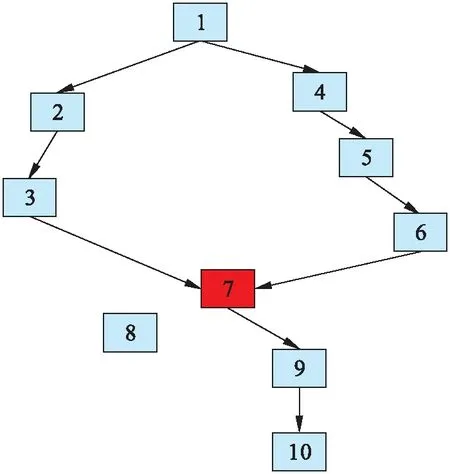
图1 测试对象拓扑结构Fig.1 Test object topology
2.2 节点内队列长度
图2为测试对象节点7内数据队列在240 s内的波动情况.分析可知,采用本文方法进行拥塞控制前,该节点内数据队列长波波动较为显著,说明该节点的运行处于不稳定状态;采用传统方法进行拥塞控制后,节点内数据队列长度波动有所改善,但该节点运行仍处于不稳定状态;采用本文方法进行拥塞控制后,节点内数据队列长度波动平缓,说明该节点处于稳定运行状态.由此可知,采用本文方法进行节点拥塞控制更能降低节点内数据队列长度的波动性,令节点正常运行.
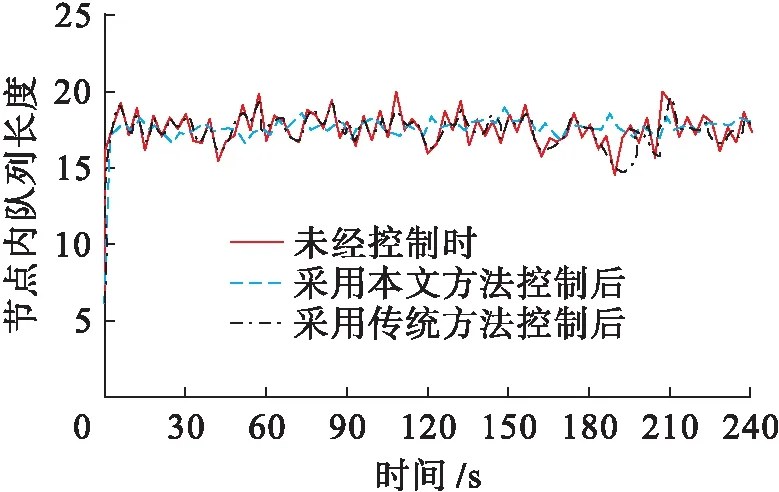
图2 节点队列变化Fig.2 Node queue variation
2.3 吞吐量
图3为采用本文方法控制前后,测试对象节点7的数据吞吐量变化情况.采用本文方法控制节点拥塞情况后测试对象节点的吞吐量与采用本文方法前及经传统方法控制后相比均显著提升,采用本文方法进行测试对象节点拥塞控制更能显著提升节点的数据传输能力.这是由于采用本文方法进行节点拥塞控制后,数据传输的窗口尺寸提升,因此,单位时间内数据传输量提升.
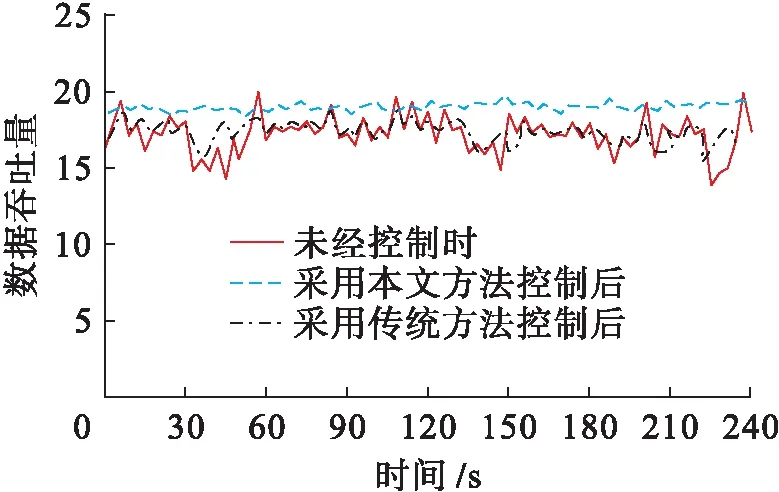
图3 吞吐量变化Fig.3 Throughput variation
2.4 节点信道拥塞标记率
图4为采用本文方法进行节点信道拥塞控制前后,节点信道拥塞标记概率的变化情况.由图4可知,未采用任何方法进行节点拥塞控制前,在节点信道拥塞条件下,其余节点受网络整体状态影响显著,因此节点数据传输信道被标记的概率具有显著的随机性与概率性.采用传统方法进行节点拥塞控制后,节点数据传输信道被标记的概率的随机性与概率性有所改善,但效果并不理想.采用本文方法进行节点拥塞控制后,节点数据传输信道被标记的概率具有较强一致性,拥塞控制概率约为4.5%,优于传统方法,这是由于采用本文方法控制后,节点拥塞现象被有效解决,其余节点不受该节点拥塞问题影响,没有被标记,因此,测试对象内节点数据传输信道被标记的概率具有较强一致性.

图4 节点信道拥塞标记率变化Fig.4 Mark rate variation of node channel congestion
2.5 控制器自适应律曲线
图5为本文方法中控制器的滑模自适应律曲线.由图5可知,相比传统方法,本文方法设计的控制器能更好地跟踪目标值,响应时间更快,可控制在100 ms左右,并且不存在显著抖动,能较好地实现测试目标拥塞控制.
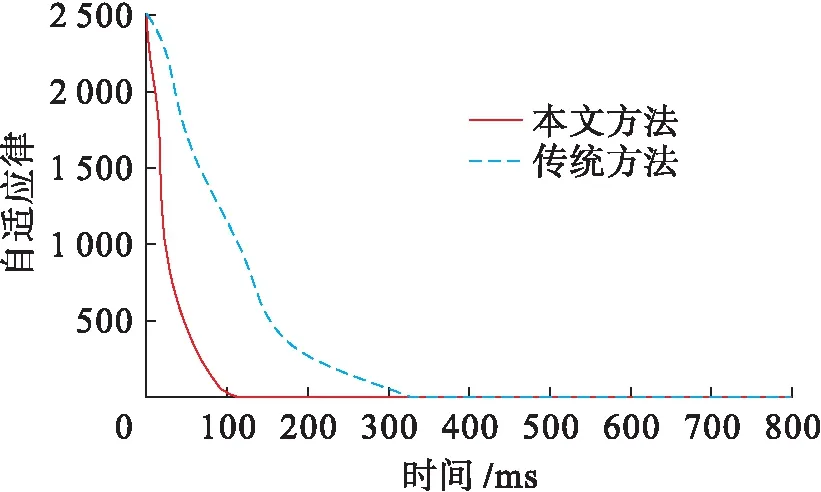
图5 滑模自适应律曲线Fig.5 Curves of sliding mode adaptive law
3 结 论
随着WSNs应用范围的扩展,人们对WSNs的应用性能提出更高要求.网络拥塞是WSNs应用过程中普遍存在的问题,因此针对该问题的解决方案研究极为重要.本文研究基于数据驱动的WSNs拥塞控制方法,以此解决WSNs内节点与链路的拥塞问题.测试结果显示,本文方法可有效降低节点内数据队列长度的波动性,提升单位时间内数据传输量,使节点信道拥塞标记率控制在4.5%左右,具有一致性,响应时间控制在100 ms左右,可显著提升WSNs的应用性能.
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
移动通信(2021年5期)2021-10-25
建材发展导向(2021年14期)2021-08-23
科学导报·学术(2020年26期)2020-10-21
小学生学习指导(低年级)(2020年4期)2020-06-02
软件(2020年3期)2020-04-20
科技创新导报(2016年27期)2017-03-14
