基于MCTS-HM的重型汽车多参数运行工况高效构建方法
2022-10-12 10:27文继泽施树明
汽车工程学报 2022年5期
文继泽,张 曼,,林 楠,施树明
(1.西安工业大学机电工程学院,西安 710021;2.吉林大学交通学院,长春 130022)
长途货运占有交通运输行业很大的市场份额,重型汽车作为长途公路运输的主要工具,相比于轻型汽车,不但具有较大比例的燃油消耗量,也是污染物的来源。当前,为提高车辆效率和减少环境污染,车辆智能化的发展产生了许多可供选择的新技术。例如,多种替代燃料、节能动力系统等被嵌入重型汽车中,并逐渐提高了重型汽车的市场渗透率。其中,燃油消耗和污染物排放的评价,以及采用新技术的重型汽车整车开发与测试环节等均需要构建车辆运行工况。然而,不同于常行驶于城市和郊区道路环境的轻型汽车,用于长途载货运输的重型汽车常行驶于高速公路环境,车辆行驶速度高,且行驶环境往往涵盖平原、丘陵、山地、高原等道路条件。考虑到道路坡度对评价和测试的影响不能忽略,很有必要构建满足工况质量条件且具有高生成效率的重型汽车多参数运行工况。这将有利于提高测试和评价的有效性和准确性,为一系列重型汽车新技术的发展打下基础。
BHATTI等和TOPIĆ等基于马尔可夫链蒙特卡罗方法,将多参数的行驶工况状态离散化,马尔可夫链状态包括车辆速度、车辆加速度和道路坡度。利用随机生成方法,分别设计了城市公交车和电动车在坡道上的行驶工况,生成工况不仅反映出随机驾驶特性,而且达到与原始数据库很高的一致性。然而,高速坡路工况不同于城市坡路工况,多参数工况的离散状态相对较多,利用马尔可夫的随机性,一般多次随机生成也较难实现工况特征指标阈值要求。岳柄剑等和ZHAO Bolin等研究了面向重型汽车高速坡道行驶的工况构建,基于包含道路坡度信息的行驶数据,采用单纯的马尔可夫链方法计算速度、加速度和道路坡度的状态转移矩阵,发现工况状态空间巨大,即使经过长时间的随机生成,有些工况特征指标仍不令人满意。这说明工况状态个数、有限工况时间长度、工况质量设计要求等均影响该方法的设计效率。CUI Yuepeng等和YUAN Mengfei等利用HM与马尔可夫链结合的方法,构建了城市坡道典型行驶工况。但是,高速公路行驶工况片段长,离散行驶工况状态的连接处仍要按照行驶状态转移规则连接,然而纯启发式方法常随机地施加到工况状态序列上,导致被作用后的工况状态序列出现异常跳跃的速度和加速度。最后获得满足代表性质量要求的工况序列概率极低,生成效率变低。
对此,为了构建满足工况质量目标条件且具有高生成效率的重型汽车多参数运行工况,针对现有纯随机的HM会破坏工况行驶特征,从而出现生成效率低的问题,本文通过描述代表性行驶工况生成问题,提出改进的多个HM,并结合当下的学习方法——蒙特卡洛树搜索选择更合适的HM,进一步提高工况生成效率。
1 代表性行驶工况描述
由于期望的工况序列要求满足与原始数据库行驶特征一致,所以选择包含速度类[怠速时间比例,p/%;平均速度,/(m·s);平均行驶速度,/(m·s);行 驶 速 度 标 准 差,/(m·s)]、加速度类[加速时间比例,/%;匀速时间比例,/%;减速时间比例,/%]、动力学类[单位距离上的正加速动能,PKE/(m·s);速度和加速度联合概率分布相关系数,/%]、坡度类[平均爬坡度,%;平均下坡度,%]等共11个评价指标,以此表征行驶工况特征。
工况质量要求,即将工况构建目标看成是工况序列要满足与原始数据库指定评价指标的相对偏差阈值约束,具体表达为式为:

式中:为生成工况,s;为原始行驶数据评价指标值;为生成工况的评价指标值;为允许偏差;为评价指标个数。
为将多目标函数转化为单目标函数,将式(1)归一化为式(2);并使用满意准则函数,具体为式(3),最终获得单目标函数,如式(4)所示。
式中:为满意准则辅助函数;为工况状态;为工况状态空间;为生成工况的目标函数。例如,当设置相对偏差目标阈值Δ为0.1时,对应目标函数值为0.1的工况即为最优工况。最终将求解期望运行工况问题转化为有限时间长度的工况序列满足指定评价指标相对偏差值阈值约束的优化问题。
2 多参数行驶工况构建方法
HM是求解期望工况优化问题的常用方法,但基于纯随机性的HM会破坏工况状态特性,需要改进HM,同时进一步提高收敛到期望工况的效率,本文提出基于MCTS-HM的多参数行驶工况构建方法框架,如图1所示,具体为利用传统马尔可夫链随机模拟方法生成有限时间长度多参数行驶工况序列的种群;通过改进的多个HM被作用后的工况序列仍满足行驶工况动态转移特性,以此更新工况状态序列;采用MCTS来决定在一个迭代过程选择哪些HM用于改进当前工况序列,并使用指数蒙特卡罗作为接受准则,判断是否接受应用HM后的工况序列。反复迭代更新工况种群,直至输出最优工况序列。
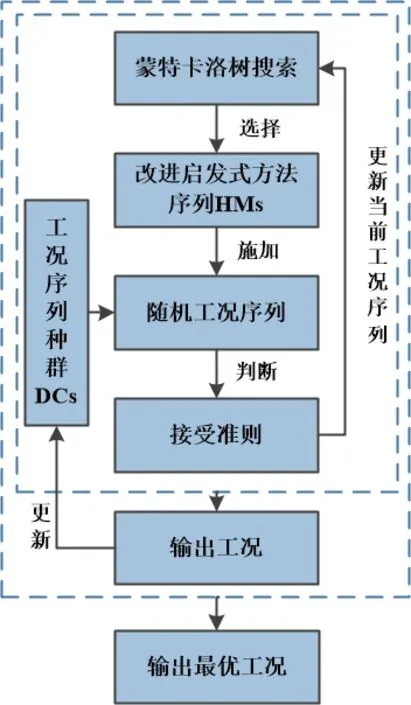
图1 基于MCTS-HM的多参数行驶工况构建方法框架
2.1 基于改进启发式的工况状态更新
为了尽可能地通过多种方式使工况序列更快接近目标工况,需要设计满足行驶工况动态转移特性的HM。
本文试图通过扰动当前的工况序列提高工况质量。借鉴交叉思想,交换一定长度的不同工况片段设计HM,交换点处要求满足多参数工况状态转移特性,具体如下。
设为当前工况序列,为随机运行工况序列,如式(5)和式(6)所示。

式中:,∈(1,2,…,N);N为工况序列长度;为工况状态;P为当前迭代次数下的工况种群;为种群大小,初始工况序列种群通过马尔可夫链模拟方法得到。
基于交叉思想的启发式方法设计如下:
首先,设定有限工况片段长度;其次,将中任意长度的工况片段替换中任意长度的工况片段;最后,生成新工况序列X,如:
同时满足以下约束条件:

2.2 基于MCTS的目标工况高效生成
为了进一步提高工况质量,需要寻找作用到工况序列上合适的HM,运用MCTS方法进行智能决策,将HM的搜索空间建模为1个树,搜索树的每个结点代表1个启发式,搜索树表示启发式搜索空间。因此,MCTS的4个步骤具体如下。
(1)选择:从根结点开始,运用上限置信区间(Upper Confidence Bound,UCB)选择要添加到当前树路径的HM。在当前迭代次数下,父结点有个子结点,根据UCB值按如下式(7)选择最合适的启发式。
式中:为比例因子;n为当前迭代次数下第个子结点的启发式被选用的次数;q为当前迭代次数下第个子结点的经验评估值,即累积评估值,如式(8)所示。

式中:((-)/)·100为第个子结点将该启发式施加到当前工况序列后工况函数值的变化;为当前工况的函数值;为当前工况应用该启发式后的函数值,迭代选择最佳子结点直至达到叶子结点,即未选用过的启发式结点。此过程输出为启发式序列。
(2)扩展:为了探索启发式空间的新区域,随机选择1个未探索的结点(一个不包含在当前的部分树路径中的启发式),并将其添加到当前的部分树路径中。
(3)模拟:从生成树路径的叶子结点开始,将结点的启发式施加到给定工况序列中,根据工况序列函数值的改进,采用指数蒙特卡洛(Exponential Monte Carlo,EMC)作为接受准则,判断是否接受该工况序列,依次操作直到根结点。
(4)更新:使用式(8)更新从叶子结点到根结点路径中每个结点的经验评估值和选用次数。
在启发式对工况序列进行改进的同时,工况序列种群要更新。具体来说,在每次迭代中,从工况种群中随机选择一条工况,将蒙特卡洛树路径识别的最优启发式序列依次应用于该工况,并根据以下方式更新工况种群,采取3种随机更新规则。
(1)如果新的工况序列质量优于工况种群中最差的工况序列,可用它取代最差的工况。
(2)无论新的工况序列质量是否变优,均将取代工况种群中最差的工况序列。
(3)无论新的工况序列质量是否变优,新的工况序列将被工况种群外随机生成的工况序列所取代。
前两种规则重点优化工况种群,第3种规则重在促进工况多样性,并防止陷入局部解。
3 结果分析与讨论
3.1 试验数据采集
试验数据来源于某用户驾驶某型号重型牵引车在坡道频繁的山区高速公路上行驶的数据,其行驶路线如图2所示。车辆从中国长春市空载行驶至磐石(标识1到标识2路段),并装载货物;然后载货行驶到河北省雄县(标识3)卸货;再空载至保定市曲阳(标识4和标识5)重新装载货物,行驶经过安新县(标识6);最后行驶至延吉到达吉林市(标识7)卸货。

图2 试验路线
车辆装载产自奥地利的模块化同步数据采集设备DEWE-M4S,该设备可同步获取奥地利设备VGPS的信号(道路经纬度和车速信息)、CAN总线信号以及加速传感器信号。数据采集频率为10 Hz,采集参数包括速度、加速度、高程等。提取高速公路行驶数据,并经过去噪和滤波处理,再采用坡度估计方法离线计算得到已知行驶路径时域上的道路坡度,最终得到2 980 km高速公路的有效行驶数据。
考虑到工况序列是利用马尔科夫链随机模拟生成,因此需要将工况的多个行驶参数离散化。具体如下:
行驶状态参数设定:速度、加速度和坡度步长分别为0.5 m/s,0.1 m/s,1%;怠速状态对应的速度区间为0~0.1 m/s,加速度区间为-0.02~0.02 m/s,坡度区间为-0.2~0.2%。速度范围0~35 m/s划分成71个状态,加速度范围-2~2 m/s划分成41个状态,坡度范围-10%~10%划分成21个状态。将实际采集数据的三维空间状态转化到一维空间中,最终根据参考文献[7]计算3个参数的状态转移矩阵,其二维投影图如图3所示。生成的多参数工况序列状态要满足该状态转移特性。工况序列长度设置为常见的1 800 s,工况序列种群大小为15。

图3 三个参数的状态转移矩阵的二维平面投影
MCTS-HM方法的参数设置如下:由于工况片段长度是任意的,所以会对应大量的启发式。本文按照交换工况片段长度将HM分成4组。可交换工况片段区间为[1,100]、[100,200]、[200,1 800]和[1 800]四类启发式。搜索树宽度为算子个数4,搜索树深度设置为3,比例因子为10。工况指标相对偏差阈值设置为10%,即最优工况的函数值为0.1。在处理器型号为Intel(R)Core(TM)i7-9700K CPU,主频为3.6 GHz,内存为32 GB配置的计算机上,利用Matlab2017a执行该方法直至输出最优工况序列。
3.2 代表性工况的行驶特征分析
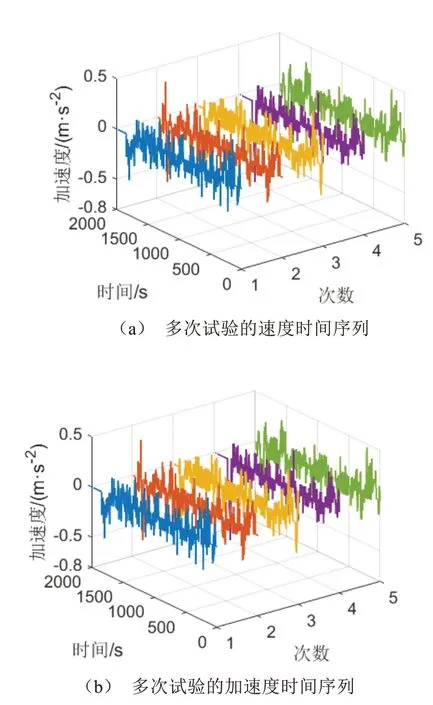
基于随机初始工况种群以及设定的初始参数,运行MCTS-HM方法5次,直至输出最优工况,即工况函数值为0.1时达到停止条件。期望高速公路运行工况时间序列,如图4所示。从时间序列上观察发现,当车辆处于爬坡时,速度会有所降低;当车辆下坡时,速度会增加,加速度处于小范围波动状态;平路上,车辆常保持匀速状态。以上特征较符合期望的重型汽车高速运行状况。
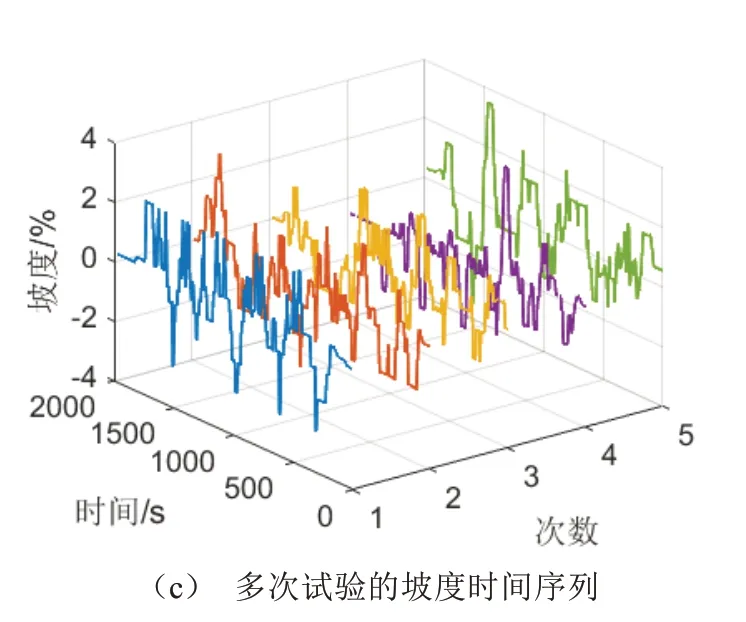
图4 MCTS-HM运行5次的最优工况序列
此外,分析了期望工况的状态转移特征是否异常,如图5所示,期望工况的状态特征均在原始行驶工况动态转移特征范围内,说明期望工况均满足原始行驶状态转移特征,同时验证了提出方法的有效性。

图5 期望工况的状态转移特征
多参数期望运行工况与原始数据库的指标对比以及相对偏差绝对值,见表1和表2。该方法输出的期望工况评价指标与原始采集数据相近,且所有评价指标的相对偏差绝对值都保持在设定阈值10%以内,速度和加速度联合概率分布相关系数全部达到90%以上。采用MCTS-HM方法获得的运行工况均满足工况质量要求,以此生成的多参数工况具有代表性,可直接应用于车辆性能测试与评估。
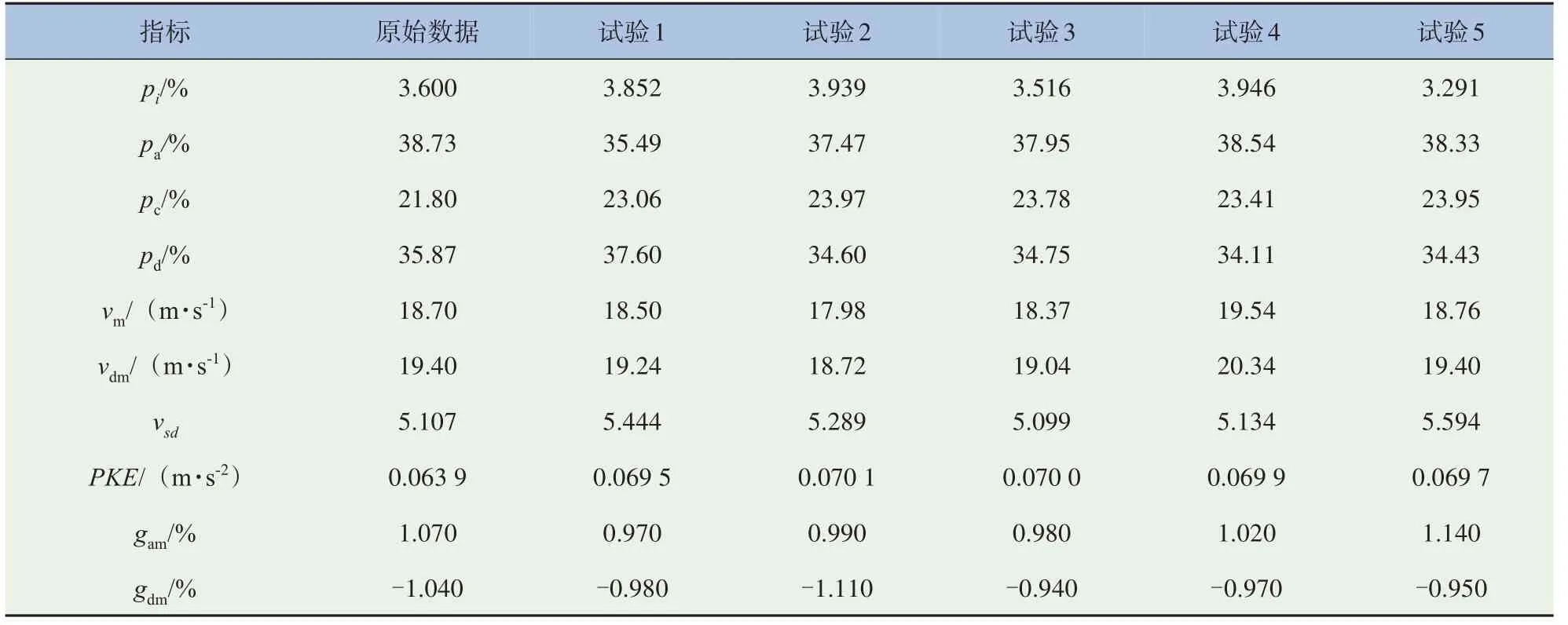
表1 MCTS-HM方法的期望工况与原始采集数据库的评价指标
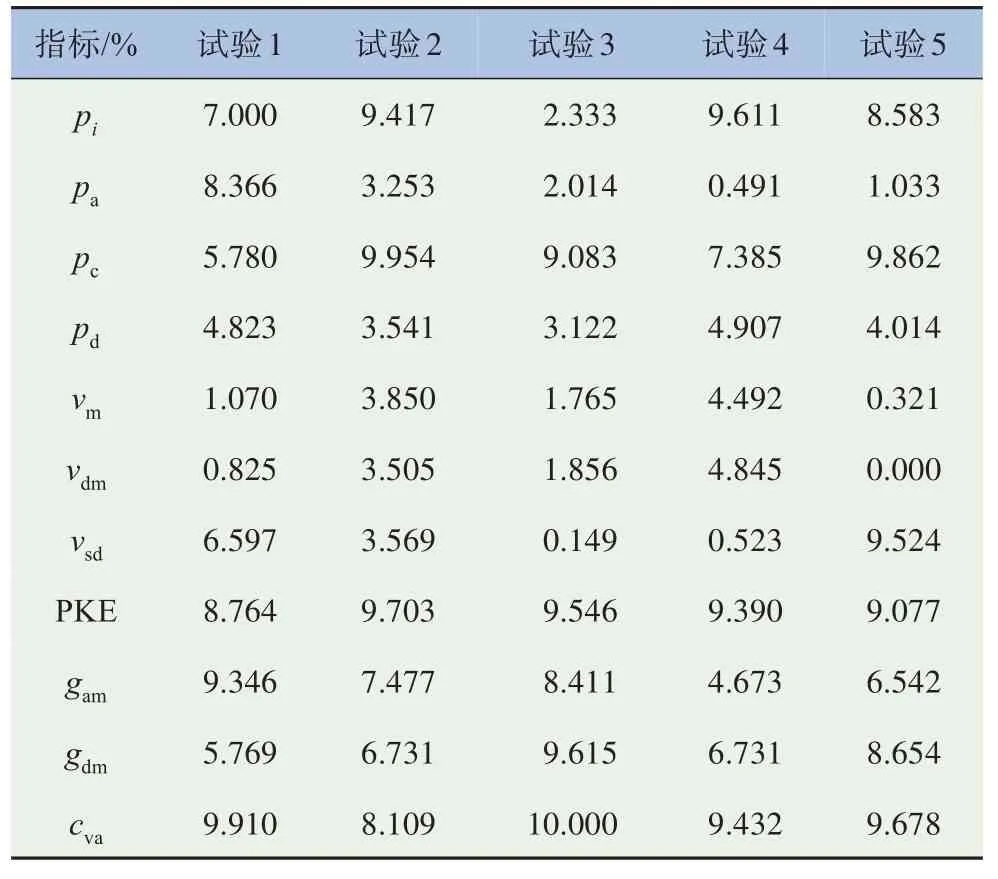
表2 MCTS-HM方法的期望工况与原始采集数据库的评价指标相对偏差绝对值
3.3 代表性工况的生成效率分析
为分析提出方法生成最优工况的效率,在相同的行驶数据和设计目标下,本文统计随机运行MCTS-HM方法5次直至输出最优工况的CPU运行时间,见表3,MCTS-HM方法的CPU运行时间均值在1 100 s左右,实际用时更短,而且该用时在实际工况设计过程中是完全可接受的。然而,由于随机性会破坏行驶工况的状态转移特征,致使设计效率低,所以相比于纯随机HM,提出方法不仅性能好,而且效率高。
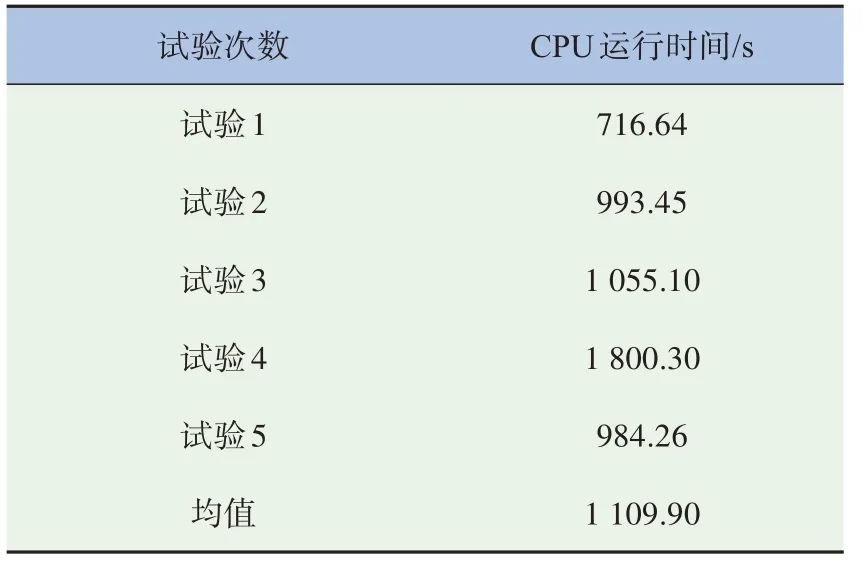
表3 随机运行MCTS-HM方法的CPU用时
4 结论
本文提出了一种蒙特卡洛树搜索和启发式方法的重型汽车多参数运行工况设计方法,并利用实际采集数据进行了分析验证,与纯随机启发式方法相比,可以得到以下结论:
(1)由多次试验结果分析可知,该方法获得的多参数运行工况符合重型汽车坡道高速运行状况特征,与原始数据库的特征指标相对偏差均满足所设定的阈值范围,满足了工况质量要求。
(2)生成工况均满足原始采集数据的状态转移特征。
(3)在设定参数条件下,该方法的CPU运行时间均值为1 100 s,提出方法不仅性能好,而且效率高。
在下一步研究中,将期望工况应用于重型汽车动力性能和经济性能评估和测试,以及动力系统参数优化等。此外,MCTS-HM的参数适用范围取决于MCTS-HM参数对设计效果的影响,可继续探讨分析MCTS-HM各类参数对工况设计质量以及效率的影响,为实际工况设计提供参考。
猜你喜欢
今日农业(2022年15期)2022-09-20
现代信息科技(2022年8期)2022-08-12
煤气与热力(2022年4期)2022-05-23
科学与财富(2021年33期)2021-05-10
汽车实用技术(2020年10期)2020-06-11
中学生物学(2018年8期)2018-03-01
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中学生物学(2008年6期)2008-08-29
中学生物学(2008年2期)2008-07-07