电动汽车制动力分配策略及多工况仿真研究
2022-10-12 05:58马一驰牛志刚
机械设计与制造 2022年10期
马一驰,牛志刚
(太原理工大学机械与运载工程学院,山西 太原 030024)
1 引言
近年来,内燃机汽车数量的不断增长使得环境与能源安全问题日益严重,而发展新能源汽车为这一问题提供了一种可行的解决办法。因此,各种类型的电动汽车有了迅猛的发展。但是,电动汽车自身也有着很多技术瓶颈限制了自身的发展,而其中最重要的一方面就是动力电池技术。动力电池是各类电动汽车中最为关键的部件之一,即便是目前大力发展的氢燃料电池电动汽车,由于其燃料电池系统的控制难度较大,一般也需要加入动力电池以保证整车运行的稳定性和制动能量的回收。虽然目前的动力电池在种类、制造技术以及性能等方面都在持续进步和提高,但仍然不能完全满足使用要求,存在着很多问题。而这些问题造成电动汽车上的能源相对紧张且相对于传统汽车能源再次补充慢[1]。因此,电动汽车研究领域的重点问题之一就是如何提高能量利用效率,使有限的能源更多的利用在驱动汽车行驶上以提高续航里程。
提高电动汽车动力电池能量利用效率的重要方向之一就是采用再生制动技术。再生制动即在制动过程中控制驱动电机使之以发电机模式工作,同时产生制动力矩作为汽车制动时的部分制动力来源,从而将部分原本需要通过摩擦制动耗散的能量回收到动力电池中供汽车继续使用,进而提高电动汽车续航里程的一项技术[2]。虽然再生制动系统有着相当多的优点,但是电动汽车在制动时不能仅通过电机提供的制动力进行制动。因为在制动时电机可以提供的制动力非常有限且易受到各种条件限制,在中高强度制动时,需要再生制动系统与传统摩擦制动系统协同工作共同提供制动力才能够满足此工况下的制动力需求[3]。因此,需为电动汽车设计一种兼顾能量回收效率与制动安全性的摩擦—电机复合制动力分配策略。所设计的分配策略可以用于纯电动汽车或燃料电池混合动力汽车等各类带有动力电池的电动汽车。分配策略设计完成后,分别使用MATLAB/Simulink与CRUISE建立复合制动力分配策略模型与电动汽车整车模型,并在新标欧洲测试循环(以下简称NEDC)工况和自行构建的太原市综合行驶工况下进行联合仿真,以评估所设计分配策略的可行性、有效性及在本地化工况下的运行效果。
2 复合制动力分配策略的建立
由于电动汽车(含有再生制动系统)在部分制动工况下的制动力来源有两部分,即摩擦制动力和电机制动力。而制动力在前后轴间的分配影响着制动时的安全性与制动效能,摩擦制动力与电机制动力的分配影响着再生制动系统的能量的回收效率[4-5]。因此,分配策略分为前后轴间的制动力分配与驱动轴摩擦—电机制动力的分配。
2.1 前、后轴间的制动力分配策略
对于前后轴间制动力的分配采用了构建目标车型安全制动区域的方法。安全制动区域即在前后轮制动器制动力关系曲线图上由I曲线、f线组、欧洲经济委员会(以下简称ECE)法规下限值曲线、x轴围成的封闭区域[6]。通过围成此区域的四条曲线可知,此区域的构建充分考虑了制动理论、法规要求、目标车型的驱动与制动形式、能量回收效率等因素,是一种合理且直观的方法。
根据制动理论可知,I曲线所表达的关系为:汽车在制动工况下前后轴所有车轮同时抱死时前后制动器制动力之间的关系[7],使用公式表述为:

式中:Fμ1、Fμ2—前、后制动器的制动力;L—汽车轴距;G—汽车重力;a,b,hg—汽车质心到前轴、后轴、地面的距离。
而f线组表达的关系为:汽车在制动工况下后轮未抱死而前轮抱死时,汽车前、后轴车轮所受的地面制动力关系。根据路面附着系数取值的不同,f线组为过固定点而斜率不同的一组直线,使用公式表述为:

式中:FX1、FX2—前、后轴的地面制动力;φ—路面附着系数。
由于分配策略应用的目标车型驱动形式为前驱,故只有前轴可回收制动能量。因此制动力分配应倾向于前轴,这种分配方式还有利于防止出现后轴提前抱死的危险工况,但前提条件是满足ECE法规的要求(我国相关法规也同样做出这种要求)。ECE下限值曲线就是考虑ECE制动法规要求所构建的曲线,其含义为在满足法规且尽可能使前轴获得的制动力达到最大时前后轴间的制动力关系曲线[8]。若设制动强度为z,使用公式表述为:

其中,各量的含义均与上文相同。将目标车型数据代入式(1)~式(3),可以在前后制动器制动力坐标图上作出其图像,如图1所示。构成的封闭区域OABC即为安全制动区域,区域内的取值均不会使车轮在制动时发生抱死现象。根据图1所示的安全制动区域,前后轴制动力取安全制动区域的下边界线(图中黑色粗实线)时,可以使制动力分配最大程度上倾向于前轴,且制动时既不抱死,又能满足法规要求。再使用当前需求制动强度下的等制动强度线(图中以z=0.3时为例)与O-A-B-C线相交,交点横、纵坐标即为前后轴需求制动力F1与F2的值。
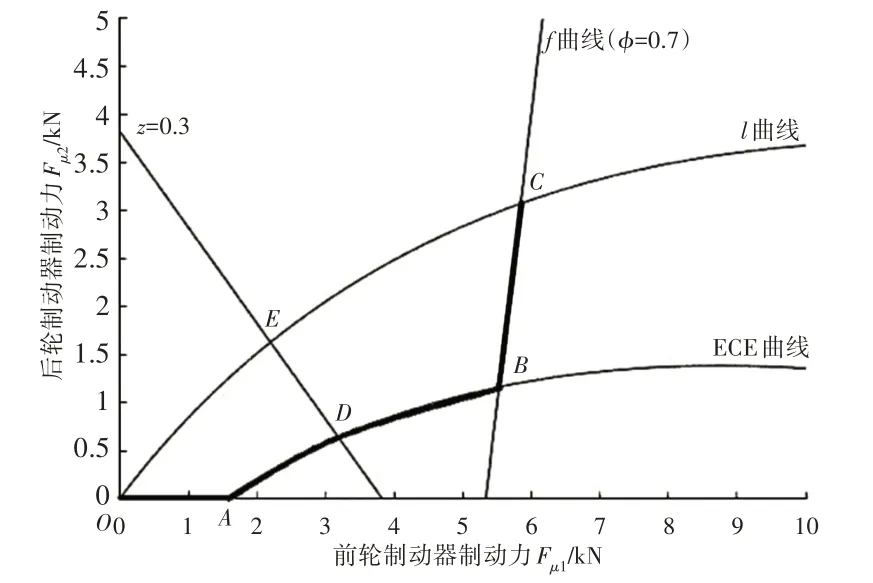
图1 电动汽车的安全制动区域Fig.1 Safety Braking Area of Electric Vehicles
2.2 再生制动介入状态及程度判定
由于再生制动系统的运行需要多个部件及总成之间的协调工作,在实际的制动过程中,再生制动系统的运行也受到了很多条件的限制[9]。因此,在设计分配策略的过程中考虑了六种因素对于再生制动系统的影响,并根据各个因素影响程度的不同分为两组,分别为直接停止再生制动的情况与限制再生制动力大小的情况。直接停止再生制动的判定参数为电池温度、制动时车轮的滑移率以及制动踏板开度变化率,当这些参数取值超出预设的数值范围之内时直接停止再生制动;而限制再生制动力情况的判定参数为动力电池SOC、当前车速与制动强度,输出量为电机制动力修正系数k。根据参数特点及实际控制需要,建立模糊控制系统实现此控制功能[10]。在建立的模糊控制系统中,选用Mamdani型模糊推理规则,在实际控制策略中的具体形式为“If SOC isA,visBandzisC,thenkisD.”。语句中SOC,v,z—输入参数,A,B,C—输入量所属模糊集,k—输出参数,D—输出量所属模糊集,并选用面积重心法解模糊。考虑到之后联合仿真的需要,使用MATLAB中的模糊逻辑控制工具箱建立模糊控制系统。根据输入输出量的特点及18名驾驶员对于各输入输出量的主观认识,再结合理论知识,确定了各输入输出量的论域、模糊子集与隶属度函数形式,如图2所示。最后,再根据对经验丰富驾驶员的调查研究并结合相关理论知识与实际控制需求,构建出的18条模糊推理规则,如表1所示。
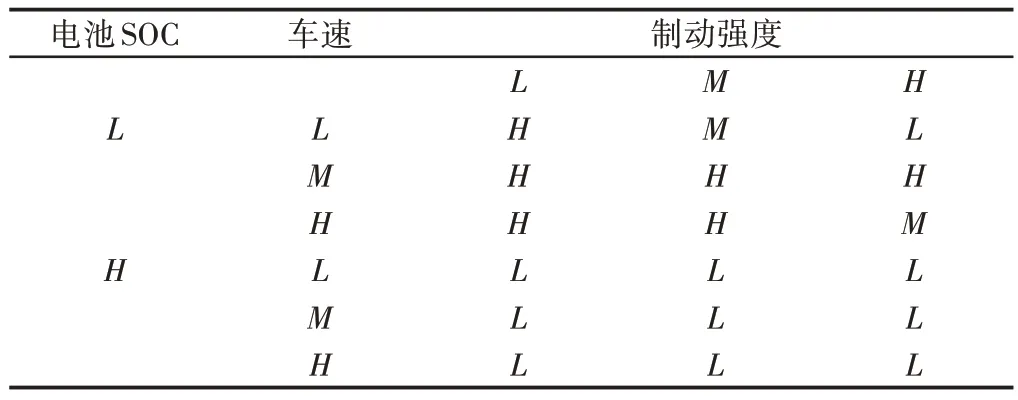
表1 模糊控制系统推理规则表Tab.1 Rule Table of Fuzzy Logic Control System
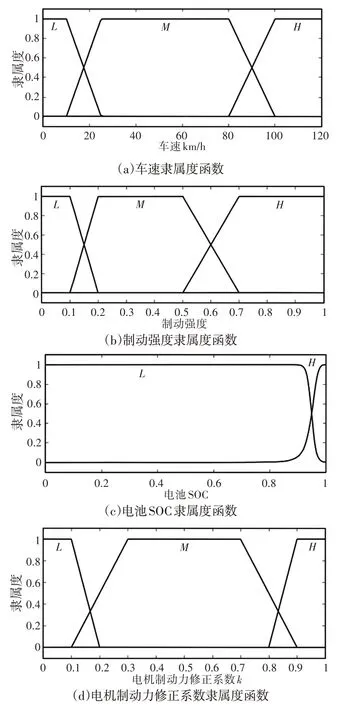
图2 模糊控制系统各变量隶属度函数Fig.2 Membership Functions of Variables in Fuzzy Control System
除上述模型中的几个判定因素外,在实际将控制策略应用到不同的目标车型时,还可以直接在此模块中加入更多的控制端口。例如:加入手动关闭或限制再生制动的开关,使汽车在能源充足的情况下制动感受更贴近于传统汽车;加入特殊模式切换开关,方便汽车在特殊工况下(例如长时间连续下坡工况时尽可能通过电机提供较小而连续的制动力来保持车速并回收能量)获得更好的制动与能量回收效果。
2.3 驱动轴上摩擦与电机制动力的分配策略
由于所设计分配策略应用的目标车型驱动形式为前驱,因此接下来仅需将前轴的制动力再分配为摩擦制动力与电机制动力两部分。
由于电机制动力不一定满足当前制动力需求,所以需要获取电机在当前制动状态下的许用制动力,并与当前的需求制动力进行比较。
若电动机的许用制动力无法满足当前制动需求,则使用摩擦制动力进行补充。使用公式可以表示为:
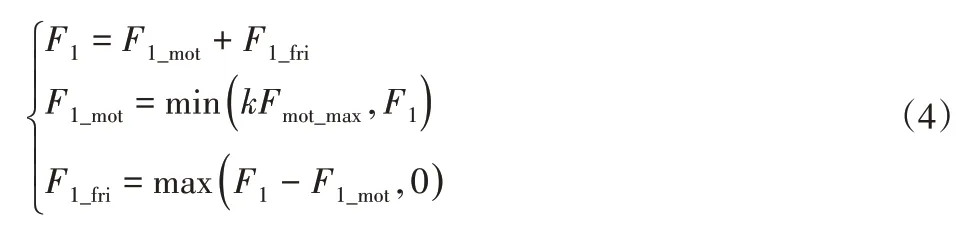
式中:F1、F1_mot、F1_fri—前轴总需求制动力、电机制动力、摩擦制动力的大小;kFmot_max—当前许用电机制动力大小。
3 仿真模型的构建与联合仿真配置
根据实际需求,采用MATLAB/Simulink与CRUISE进行联合仿真的方法评估所设计分配策略的实际作用与整体回收效果。在构建分配策略模型时,首先根据每一部分的控制策略构建出各个部分的子模型,再根据实际控制过程将各个子模型进行组合,最后适当添加数据类型转换模块,以防止仿真数据类型产生错误或丢失精度,所构建的分配策略模型,如图3所示。
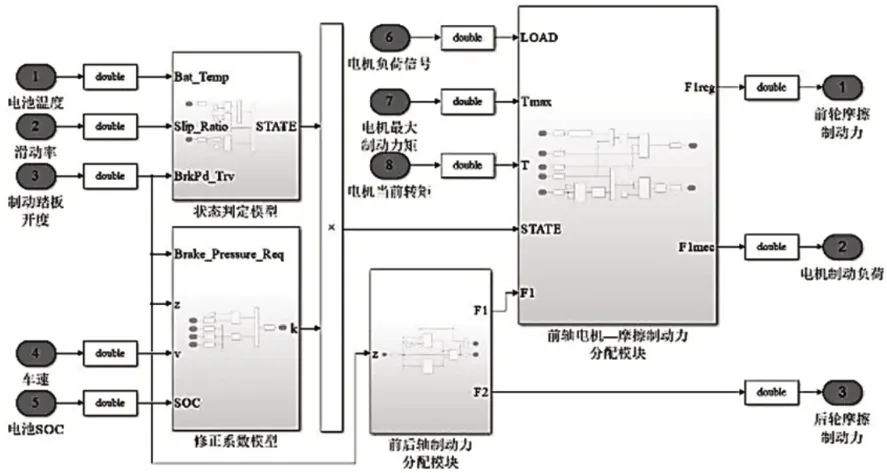
图3 复合制动力分配策略模型Fig.3 Model of Composite Braking Force Distribution Strategy
在图3所示的模型中输入参数8个,其数据来自于整车模型;输出信号3个,分别为电机负荷信号与前、后轮制动器制动力信号。将这三个控制信号向CRUISE中整车模型的相应模块输出,以此控制电机的工作状态与各个制动器的制动力,从而实现分配策略的功能。
分配策略模型建立后,选用某微型前驱纯电动汽车作为目标车型在CRUISE中建立整车模型,车辆基本数据,如表2所示。
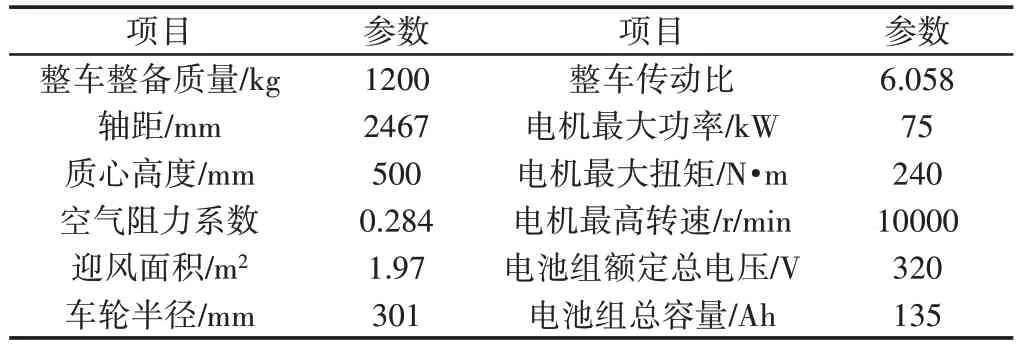
表2 整车主要参数Tab.2 Main Parameters of the Vehicle
根据上述参数与目标车型驱动形式可以在CRUISE中建立整车模型。为了采用所设计的分配策略对汽车的制动系统进行控制,需要在整车模型中插入联合仿真接口模块。根据实际情况,选用MATLAB DLL连接方式。相比于其他连接方式,其优点为节约硬件资源,仿真速度较快,而且在仿真过程中不需要MATLAB保持运行状态,生成DLL文件后计算机只需要安装CRUISE即可进行仿真[11]。深色模块即为联合仿真的MATLAB DLL接口模块,如图4所示。在仿真前需使用编译器将分配策略模型编译生成DLL文件并嵌入该模块,再将各个输入输出信号与整车模型进行正确的连接,调试检查后即可进行工况的设定与仿真工作。
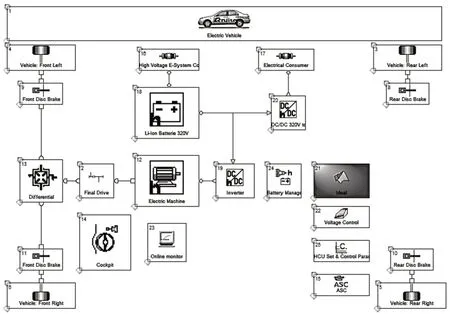
图4 联合仿真模型Fig.4 Model of Co-Simulation
4 仿真工况的构建与仿真结果分析
4.1 仿真工况的构建与设定
在现有的电动汽车续航里程评价体系中,行驶工况对电动汽车的能耗有很大影响,不同工况下再生制动系统的能量回收效率也有着很大的差距。而建立尽可能贴合实际的测试工况对于评估所设计的分配策略有着至关重要的作用。因此选取在国内外广泛使用的NEDC工况与根据目标车型实际使用情况自行构建的太原市综合行驶工况进行再生制动能量回收的仿真分析。对于NEDC工况,其车速时间曲线及数据表已经由相关标准给出,直接调用即可。而对于太原市综合行驶工况,需要根据实际采集得到的各类道路行驶数据经分析处理自行构建。为了使构建的工况能够更加真实的反映目标车型的实际使用场景,在工信部“中国新能源汽车产品检测工况研究和开发”项目的支持下,使用项目组所提供的工况数据记录仪,通过轻型车实地自主驾驶的方法自行采集了大量原始数据。所采集的数据覆盖了太原市区和郊区的各种不同道路,并对车型、时间段等因素进行了充分的考虑[12]。获得原始数据后,将所得的零散数据整理成大量的分段短行程数据,并对获得的大量短行程数据段进行聚类分析,构建出高/快速路、主干路与分支路三大类行驶工况。再根据NEDC工况的基本结构,选取上述三大类工况中具有代表性的部分进行合成。经分析处理后最终得到的太原市综合行驶工况的基本数据,如表3所示。车速时间曲线,如图5所示。数据和曲线均表明所构建的太原市综合行驶工况适合进行再生制动方面的仿真试验。
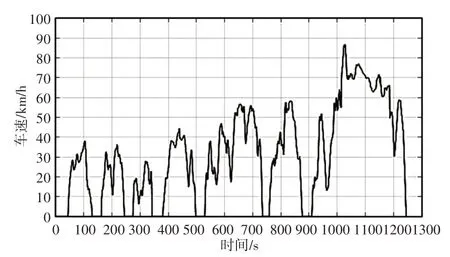
图5 太原市综合行驶工况车速-时间曲线Fig.5 The Speed-Time Curve of Taiyuan Driving Cycle
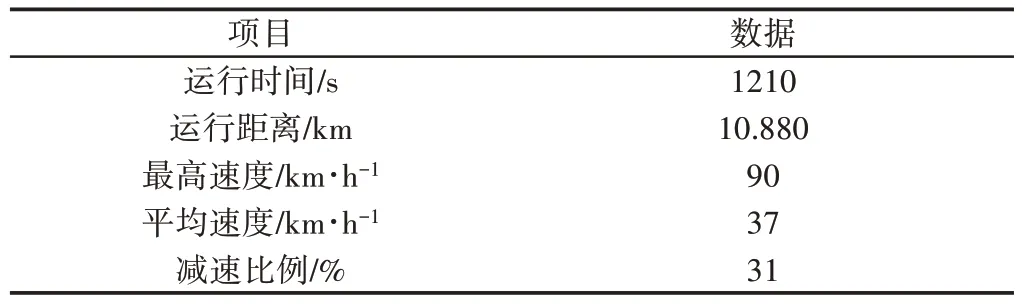
表3 太原市综合行驶工况基本数据Tab.3 Basic Data of Taiyuan Driving Cycle
构建仿真工况后,在CRUISE的工况设定界面中输入工况数据表以及驾驶员、外界环境等信息,调整好各个仿真参数例如仿真步长,数据精度,求解器等即可进行仿真分析。整车实验质量与其它仿真条件与方法参照国家推荐标准执行。
在联合仿真中,首先使用无再生制动系统与含有一般再生制动系统的纯电动汽车模型运行两种工况,分别记录电池SOC在运行前后的数值;再使用所设计的分配策略(以下简称优化分配策略)控制此纯电动汽车的再生制动系统,运行相同的两种工况,记录运行前后电池SOC数值;最后计算并比较使用不同分配策略控制的纯电动汽车在运行相同工况后电池SOC的消耗量,即可对所设计的分配策略在不同工况下的实际使用效果进行评估。
4.2 仿真结果及分析
对联合仿真模型进行检查与调试后运行联合仿真,并分析整理仿真数据,如表4~表6所示。
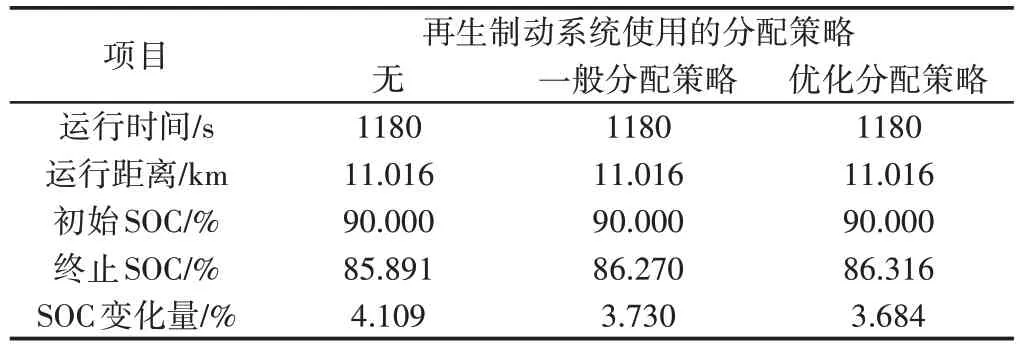
表4 NEDC工况仿真数据Tab.4 Simulation Data Under the NEDC Driving Cycle
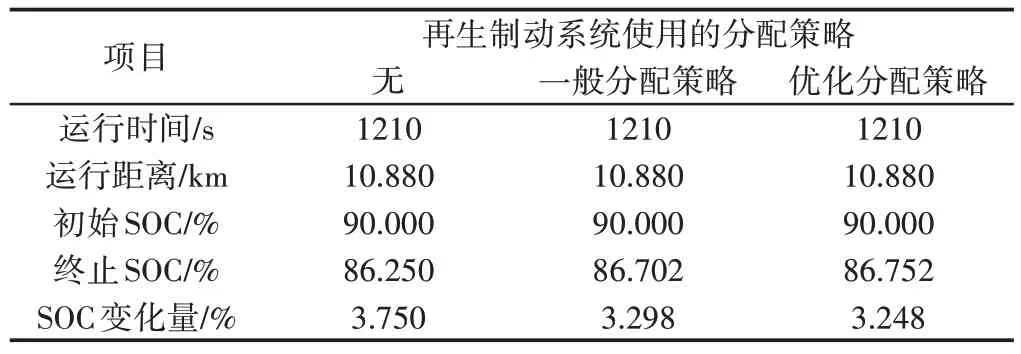
表5 太原市综合行驶工况仿真数据Tab.5 Simulation Data Under the Taiyuan Driving Cycle
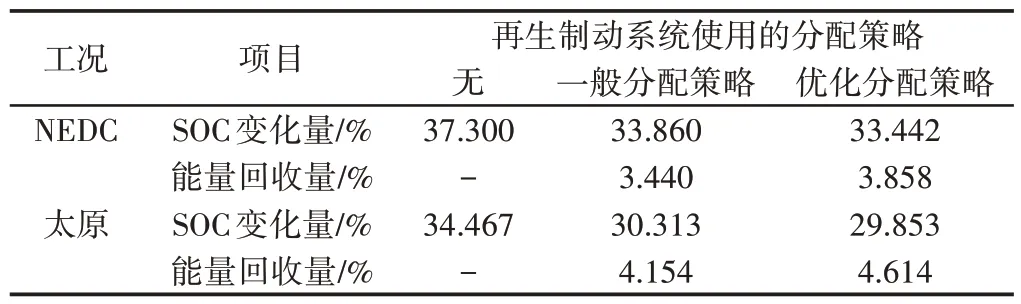
表6 不同工况及控制策略下百公里能耗与能量回收量Tab.6 Energy Consumption and Recovery of 100km Under Different Driving Cycles and Control Strategies
通过比较相同工况下有无再生制动系统参与时的数据可知,有再生制动系统参与时车辆运行相同循环工况所消耗的电量有明显的减少,证明再生制动系统对于纯电动汽车作用明显。通过比较相同工况下使用不同制动力分配策略的再生制动系统的数据可知,使用优化分配策略的再生制动系统在实际运行过程中电池SOC下降量更少,使用效果更好。
而对比使用相同分配策略,但运行不同工况时的每百公里电池SOC下降数值以及能量回收量数据可知,运行太原市综合行驶工况时,再生制动系统回收的能量比NEDC工况更多,其主要原因为太原市综合行驶工况中存在着更多的制动工况。证明了在制动工况比较频繁的使用场景下再生制动系统具有更加明显的应用效果。利用仿真所得数据还可绘制出两种工况下车速与电池SOC随时间变化而变化的曲线,如图6、图7所示。
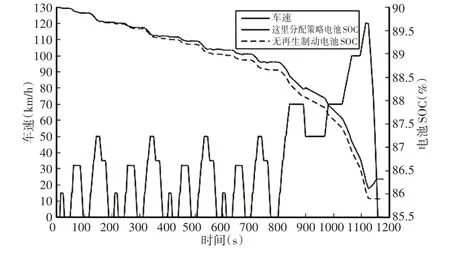
图6 NEDC工况仿真曲线图Fig.6 Simulation Curve Under the NEDC Driving Cycle
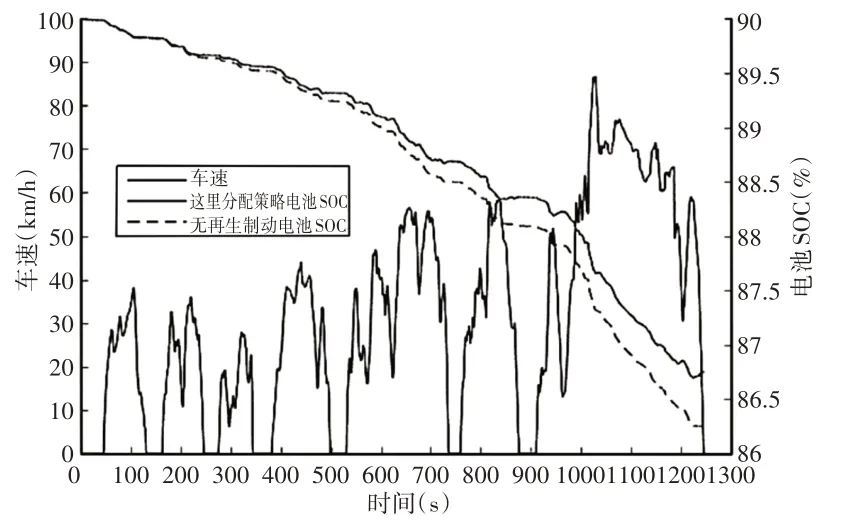
图7 太原市综合行驶工况仿真曲线图Fig.7 Simulation Curve Under the Taiyuan Driving Cycle
观察图6、图7的仿真曲线可知,仿真所得速度时间曲线与原工况曲线的跟随性(仿真所得的速度—时间曲线与所构建的工况曲线的重合度)较好,证明了所设计的分配策略能够满足当前车辆的制动需求。且在速度—时间曲线处于下降区段(制动工况)时,电池SOC曲线均处于上升区段,即在制动时动力电池有明显的能量输入,也进而也证明了所设计的分配策略在通用工况和本地化工况下均具备可行性与有效性。
5 结论
通过对各项仿真数据的分析可知,所设计的制动力分配策略(优化分配策略)在NEDC工况与太原市综合行驶工况下的制动能量回收量均高于一般分配策略,提升幅度分别为12.2%与11.1%。相比于无再生制动系统与使用一般制动力分配策略的再生制动系统,可使纯电动汽车在每百公里太原市综合行驶工况中电池SOC减少消耗4.154%与0.460%,同时控制过程中考虑的因素更全面,且通过引入模糊控制环节,提高了控制的稳定性与容错率。因此,所设计的制动力分配策略在通用工况与本地化工况下均有较好的应用效果。
猜你喜欢
今日农业(2022年4期)2022-11-16
煤气与热力(2022年4期)2022-05-23
今日农业(2021年12期)2021-11-28
今日农业(2021年20期)2021-11-26
舰船科学技术(2021年12期)2021-03-29
汽车工程(2021年12期)2021-03-08
航空发动机(2020年3期)2020-07-24
北京汽车(2020年1期)2020-05-07
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13