
无人驾驶高速插秧机田间作业对比试验研究
2022-10-30 05:55张文斌严宇叶涛胡军
农业装备与车辆工程 2022年3期
张文斌,严宇,叶涛,胡军
(215128 江苏省 苏州市 苏州市农业机械技术推广站)
0 引言
农业机械自动导航是精准农业技术体系中的一项核心关键技术[1]。随着导航技术的快速发展,基于卫星导航系统的无人驾驶技术广泛应用于水稻机插秧种植环节[2-3]。张智刚[4]等在久保田SPU-68 型插秧机上开发了基于差分全球定位系统和电子罗盘的导航系统,提升了直线路径跟踪时的定位精度;伟利国[5]等在XDNZ630 型水稻插秧机上采用RTK GPS 技术和PID 微分控制算法,在进一步提升直线行驶精度的基础上,实现了调头转向的控制。何杰[6]等以井关PZ-60 型水稻插秧机为试验平台,设计了一款联合导航控制系统,试验结果表明该导航系统控制插秧机作业时具有良好的效果,满足无人驾驶时自动作业的需求。近年来,农芯科技、丰疆智能、上海联适等导航公司在插秧机优化设计、自动导航和作业过程智能调控等领域进行了深入研究[7]。
为探究无人驾驶高速插秧机的作业效果,本文以前装丰疆FJ1001 型智能控制高速插秧机、后装农芯HS2000BD-2.5RD 型自动导航系统的高速插秧机和常规高速插秧机为试验对象,围绕行驶性能、插秧作业效果和经济效益等方面开展田间作业对比试验研究,为智能农机推广应用提供装备与技术参考。
1 无人驾驶插秧机工作原理
导航定位、路径规划和路径跟踪是农机无人驾驶系统的3 个关键技术[8-10]。通过对高速插秧机进行智能化改装,搭建智能驾驶控制系统的硬件平台,包括信息获取系统、决策控制系统、部件执行系统,实现对插秧机无人驾驶,如图1 所示。无人驾驶插秧机由信息获取系统对作业田块进行数据采集,决策控制系统进行路径规划,生产便于插秧机识别的控制信息,最后由部件执行系统进行行驶作业。插秧机作业环境较为恶劣,使得插秧机作业方向极易发生变化,作业过程中,通过信息获取系统得到插秧机前轮转角信息,再由决策控制系统对比预设作业路径,实时调整前轮转角,进而保证插秧作业质量。

图1 智能驾驶控制系统硬件平台Fig.1 Hardware platform of intelligent driving control system
2 试验设计
2.1 试验机具
本文试验机具是前装无人驾驶高速插秧机、后装无人驾驶高速插秧机和常规高速插秧机3 款机具(下文3 款机具简称:丰疆前装、农芯后装、常规机型),如表1 所示。
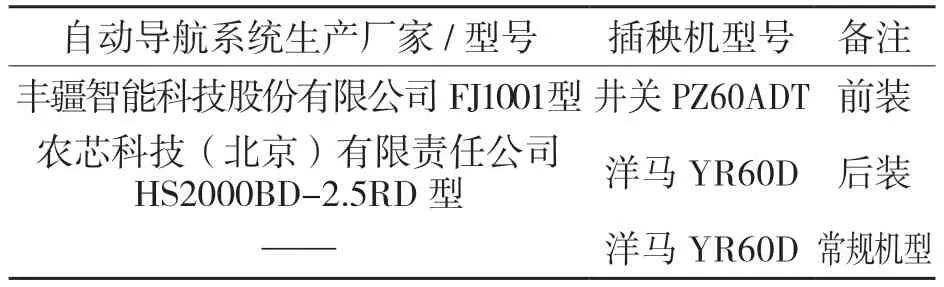
表1 试验机具基本情况表Tab.1 Basic information of test machines
2.2 试验前基本情况测定
本次试验时间2021 年6 月16~17 日,试验地点苏州市吴中区临湖镇,3 款机具所对应试验田块的基本情况如表2 所示,试验所用秧苗的基本情况如表3 所示。

表2 试验田块的基本情况表Tab.2 Basic information of test field

表3 试验秧苗的基本情况表Tab.3 Basic information of experimental seedlings
测量结果表明,试验田块和水稻秧苗的基本情况完全符合本地的栽植农艺要求。
2.3 对比试验
根据江苏省DG32/Z 011-2020《智能控制半自动高速插秧机》[11]专项鉴定大纲和NY/T 3334-2018《农业机械—自动导航辅助驾驶系统质量评价技术规范》[12]的试验方法和检测指标,对3 款机具开展田间作业试验研究,围绕行驶性能、插秧作业性能和作业效率3 项指标进行对比分析研究。3 款机具同时在试验地块进行插秧作业,丰疆前装无人驾驶高速插秧机和农芯后装无人驾驶高速插秧机均采用一人摆秧、无人驾驶、自主规划路径作业方式,常规高速插秧机采用一人驾驶、一人摆秧常规作业方式。试验作业条件按照苏州地区水稻栽种要求,株距选择12 cm,栽植深度固定在最小值。3 款机具栽植效果如图2 所示。

图2 3 款试验机具的实际作业图Fig.2 Actual operation diagram of three test machines
3 试验结果与分析
3.1 行驶性能分析
3 款试验机具在试验田块中以相同的速度进行往返作业3 次,将平行于插秧机预设作业轨迹的直线作为基准线,在基准线上以0.5 m 为等距离连续取50 个点作为轨迹记录点,分别测量行程轨迹1 上Ai点至基准线的距离xi,以及行程轨迹2 上Bi点至Ai点距离hi、行程轨迹3 上Ci点至Bi距离mi,如图3 所示。
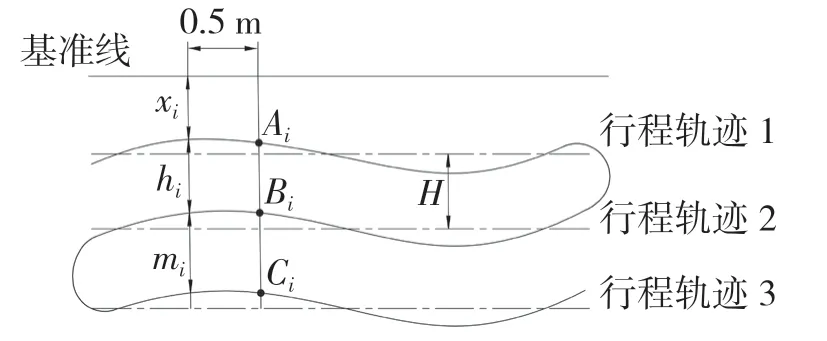
图3 插秧机行驶轨迹示意图Fig.3 Schematic diagram of driving track of transplanter
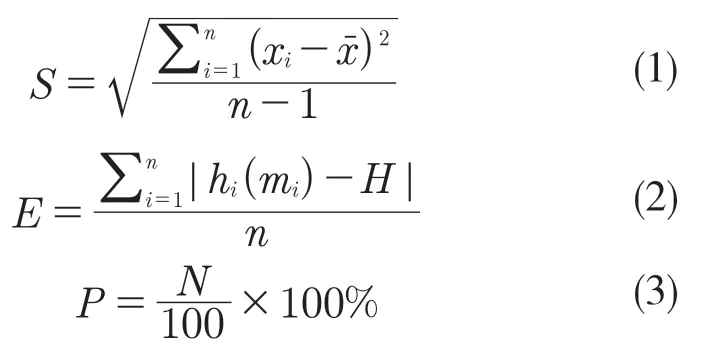
式(1)—式(3)为3 款机具直线精度、作业行间距偏差及合格率计算公式。结果如表4、图4、图5 所示。

表4 直线精度和作业行间距偏差表Tab.4 Data sheet of straight line accuracy and operation line accuracy
从表4、图4 和图5 可以看出,丰疆前装、农芯后装无人驾驶高速插秧机的直线精度分别为2.95,2.83 cm,人工驾驶常规插秧机直线精度为8.50 cm;丰疆前装、农芯后装无人驾驶高速插秧机第2 行行间距偏差分别为0.14~19.38 cm和0.27~20.63 cm,第3 行行间距偏差分别为0.05~12.37 cm 和0.13~10.46 cm,而人工驾驶常规插秧机第2 行、第3 行行间距偏差分别为8.28~33.24 cm 和1.36~20.24 cm。相较于与人工驾驶常规高速插秧机,无人驾驶高速插秧机具有更高的直线精度和更小的行距间平均偏差,且偏差变化幅度不大,行驶稳定性较高。

图4 3 款试验机具直线精度偏差图Fig.4 Straight line accuracy deviation diagram of three test machines
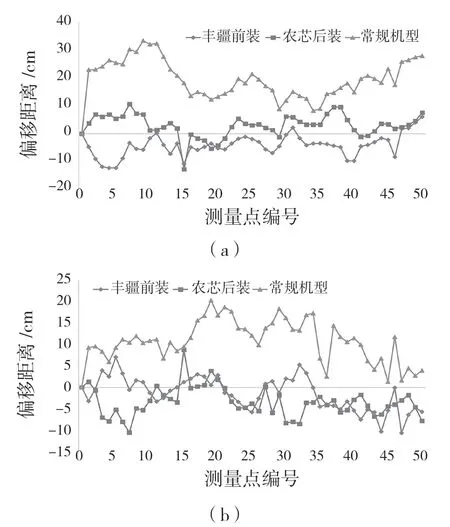
图5 3 款试验机具作业行间距偏差图Fig.5 Deviation diagram of operation line accuracy of three test machines
根据《智能控制半自动高速插秧机》专项鉴定大纲,要求直线精度和作业行间距平均偏差在±5 cm 以内,作业行间距偏差合格率≥90%以上为合格。丰疆前装和农芯后装无人驾驶高速插秧机的直线精度,第2 行、第3 行作业行间距平均偏差均小于5 cm,符合大纲要求,但作业行间距偏差合格率<90%,不符合大纲要求,说明水田的实际作业环境对加装自动驾驶系统的插秧机行驶稳定性有着一定的影响,但相较于人工驾驶插秧机,自动驾驶系统在直线精度和行驶稳定性方面具有明显的优势。
3.2 插秧作业性能分析
在每个田块交叉选取3 个测区,每个测区取50 穴(共150 穴),分别测定每穴的插值株数、伤秧株数、漂秧株数、漏插株数;在3 个测区附近各连续选择10 穴秧苗,测定插秧深度,并计算出相应的相对均匀度合格率、伤秧率、漂秧率、漏插率和栽植深度合格率5 项指标,如表5 所示。
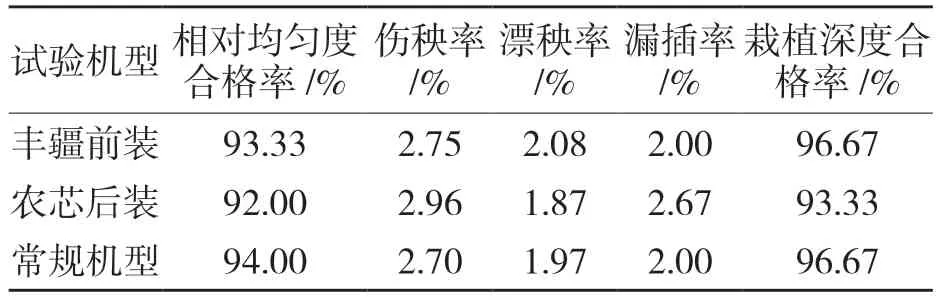
表5 3 款试验机具插秧作业情况数据表Tab.5 Data sheet of transplanting operation of three test machines
对照《智能控制半自动高速插秧机》专项鉴定大纲要求:相对均匀度合格率≥85%,伤秧率≤4%,漂秧率≤3%,漏插率≤5%,栽植深度合格率≥90%。从表5 可见,3 款试验机具都符合插秧作业的栽植要求,且差距不大,前装或后装自动驾驶系统并不会影响插秧机原有的栽植性能。
3.3 经济效益分析
本文记录了3 款试验机具在大田实际插秧作业的时间,计算出相应的作业效率。同时,假设插秧机一天作业8 h,驾驶员和摆秧人员每天劳务费均为400 元,计算出3 款试验机具每公顷作业人工成本,如表6 所示。
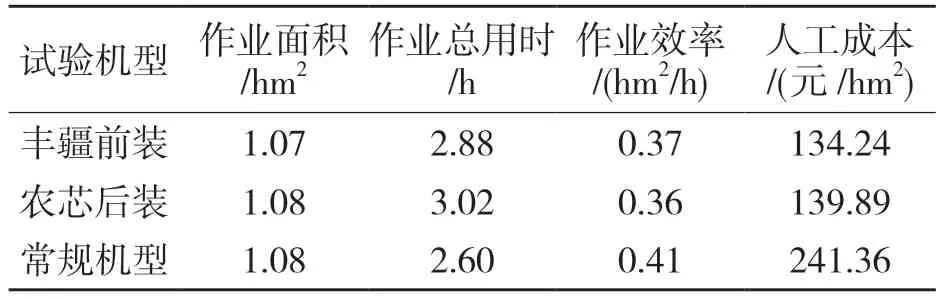
表6 3 款机具作业效率、作业成本情况表Tab.6 Operating efficiency and operating cost of three machines
表6 可以看出,常规高速插秧机每小时作业0.41 hm2,每公顷作业人工成本241.36 元,而农芯后装、丰疆前装无人驾驶高速插秧机每小时作业分别为0.36,0.37 hm2,每公顷作业人工成本分别为139.89 元和134.24 元。从数据上看,无人驾驶高速插秧机的作业效率虽然低于人工驾驶常规高速插秧机,但无人驾驶可省下插秧机驾驶员的人工成本,使每公顷作业人工成本远低于常规高速插秧机,具有较好经济效益。
4 结论
(1)高速插秧机在加装导航驾驶系统之后,并不会影响原有的插秧功能,相反大幅提高插秧直线精度、作业行间距平均偏差,改善水稻透光性、通风性,同时便于后续开展机械化水稻田间管理作业。
(2)加装导航驾驶系统的插秧机作业速度虽然相较人工驾驶偏慢,但可以省去驾驶员的人工作业成本,降低单位面积作业人工成本,具有很好经济效益。
(3)加装导航驾驶系统的插秧机在使用前需要根据插秧机自身的尺寸来调节参数设置,对机手素质提出了更高的要求。另外,在试验过程中,无人驾驶高速插秧机偶尔会出现信号干扰、规划路径失败等问题,需要进一步提高导航驾驶系统的可靠性,加强对从业人员专业化培训。
猜你喜欢
商界评论(2022年1期)2022-04-13
农民致富之友(2020年10期)2020-05-11
数学大王·趣味逻辑(2019年10期)2019-11-06
新农村(2018年29期)2018-04-02
草原(2018年2期)2018-03-02
数学大王·低年级(2017年9期)2017-09-18
青年文学家(2016年34期)2017-03-31
科技创新与应用(2017年5期)2017-03-16
浙江社会科学(2004年2期)2004-04-21
