电动汽车充电站参与电网调压的建模与控制方法
2022-12-01 02:53田增垚刘少午张强王超
南方电网技术 2022年10期
田增垚,刘少午,张强,王超
(1. 国家电网公司东北分部,沈阳110000;2. 辽宁东科电力有限公司,沈阳110179)
0 引言
电动汽车的普及是解决能源和环境危机的重要手段,甚至被认为是未来交通的唯一长远解决方案[1 - 3]。电动汽车充电负荷建模涉及动力电池的充电特性、用户的用车行为、充电方式、充电机结构等多种因素[4 - 5]。目前对电动汽车负荷建模的研究着重于静态负荷模型,而对电动汽车充电站动态过程的研究较少[6 - 7]。
充电机作为电动汽车充电站的核心部分,经历了从不控到全控,从斩波到高频的发展,目前广泛应用的电动汽车充电机是由三相PWM整流器、DC-DC变换器组成的两级式结构[8 - 9]。对于三相PWM整流器的数学模型,目前最常用的做法是根据整流器的结构列出电路方程,然后对两相旋转坐标系下的等效控制方程进行闭环控制[10 - 11]。DC-DC变换器的建模方式主要包括数值法和解析法,前者包括直接数值法和间接数值法,后者包括离散解析法和连续解析法[12 - 13]。
对充电机的仿真建模工作,文献[14]结合实际充电机参数和蓄电池充电过程中获得的数据,建立了高频充电机的一般谐波仿真模型;并基于北京奥运会纯电动公交特点,对仿真模型进行了分析。文献[15]利用PSCAD和Simulink搭建了充电状态和放电状态下的充电机模型,采用恒功率控制策略,通过调节有功电流和无功电流使其跟踪参考电流,以实现对有功功率和无功功率的输出控制。文献[16]建立了带锂电池负载的充电电源小信号模型,设计了满足电动汽车锂离子电池充电要求的充电控制策略。文献[17]对移相全桥变换器的工作原理及其特点进行理论分析,并对其进行小信号建模和仿真研究,分别设计了500 W和75 kW移相全桥ZVS DC/DC变换器模型。文献[18]根据建立的无功功率参考,使用电动汽车的三相双向逆变器,通过PQ控制提供无功功率补偿并保持母线电压稳定。
以上这些文献多数是通过建立充电机模型,进行控制策略的研究和优化,很少从电力系统层面上对充电机负荷模型及其电压支撑特性进行研究[19 - 20]。本文将从电动汽车充电机的核心设备和充电系统的结构分析出发,基于MATLAB/Simulink仿真软件搭建的含有三相电压源型PWM整流器、移相全桥零电压开关(zero voltage switch, ZVS)直流变换器的充电机模型,提出了利用平均开关模型和阻抗模型对充电机进行模型简化的方法,在此基础上,进一步提出了下垂控制与电压支撑控制相结合的充电站参与电网调压的控制方法。最后,设计不同电压扰动场景,验证所提简化模型及控制方法的有效性。
1 电动汽车充电站模型
1.1 电动汽车充电站的拓扑结构
电动汽车充电站主要有共直流母线和共交流母线两种拓扑形式。其中,共直流母线结构对网侧电能质量统一管理方便、需要的整流装置较少。因此,本文采取如图1所示的共直流母线结构。

图1 电动汽车充电站拓扑结构Fig.1 Topology of electric vehicle charging stations
1.2 动力电池模型
基于电池实验手册《PNGV Battery Test Manual》[21]建立电池模型,其等效电路如图2所示。图2中,Uoc为电池开路电压;R0为电池等效欧姆内阻,Rp为等效极化内阻,Cp为极化电容;流过极化电阻Rp上的电流为Ip;Cb为描述电池充放电过程中所产生的开路电压变化电容。

图2 PNGV模型等效电路图Fig.2 The equivalent circuit of PNGV model
电池的等效电路方程为:
(1)
UL=-Ub-Up-R0IL+UOC
(2)

1.3 DC-DC变换器模型
DC-DC变换器是两级式充电机的第二级,连接前级的PWM整流器和后级的动力电池负载。本文选用移相全桥ZVS直流变换器,采用电压电流双环控制方法,原因如下:1)充电对象是电动汽车,从人身安全考虑,需要选择带隔离的直流变换器作为系统主拓扑结构;2)在常用的带隔离直流变换器拓扑中,与单端反激、单端正激、半桥等电源拓扑相比,全桥式变换器包含4个功率开关管,输出功率最大;3)在较高的电源开关频率下,移相全桥ZVS电路与传统的全桥电路的不同就在于其具有并联谐振电容,能够实现软关断,通过谐振电感与谐振电容进行谐振,使开关管两端的电压为0,实现零电压开通,从而减少开关损耗。移相全桥ZVS直流变换器的主电路拓扑如图3所示。

图3 移相全桥ZVS直流变换器Fig.3 ZVS DC-DC converter
1.4 三相PWM整流器模型
充电机交-直变换部分的三相电压源型PWM整流器(VSR)等效电路及控制如图4所示,其外环为电压环,给定直流母线电压参考值,通过PI控制输出d轴电流给定值。内环为电流环,采用前馈解耦控制策略,采用PI调节器输出ud、uq,ud轴电流控制直流电压Vdc,uq轴电流控制网侧功率因数,此处希望充电机工作于单位功率因数下,故取iq为0。

图4 三相电压源型PWM整流器Fig.4 Three phase voltage source rectifier
2 电动汽车充电站模型的简化方法
2.1 平均模型简化方法
采用平均模型对充电机模型进行简化,即将详细模型中的IGBT等开关器件用平均模型代替,用电流源和电压源代替开关网络,使模型中不再包含高频开关,具体如图5—6所示。相应地,其控制部分的PWM模块也可以略去,直接将原来用作PWM调制的电压作为控制等效受控电压源的参考电压,保留其余控制电路。

图5 PWM整流器平均等效电路模型Fig.5 Average equivalent circuit model of PWM rectifier

图6 全桥开关网络等效电路模型Fig.6 Equivalent circuit model of full bridge switching network
2.2 阻抗简化方法
在两级式结构的直流充电机中,PWM整流器作为连接电网的前级,承担的主要功能是控制功率交换和功率因数、维持直流母线电压。DC-DC变换器作为后一级,主要负责将直流电压、电流变换到动力电池可以承受的电压、电流,并设定充电的方式。也就是说,前级的整流器基本上决定了充电机的动态特性,而后级的DC-DC变换器主要用作电压变换,电动汽车电池对于并网点的动态性能的影响也很小。因此,可以通过输入阻抗等效的方式模拟DC-DC变换器和电池负载,得到更简化的充电机模型。
电网发生故障的持续时间通常只有几微秒至几秒,相对于电池的小时级充电过程而言,这个过程很短,因此电池可以视为恒功率负载:
(3)
式中:Rin为DC-DC变换器输入阻抗;Uin、Iin分别为DC-DC变换器的输入电压和输入电流;Po(t)为DC-DC变换器输出功率,即电动汽车充电功率;Pin(t)为DC-DC变换器输入功率;η为变换器效率。
《意见稿》提出,智能快件箱运营企业设立的智能快件箱应当按照国务院邮政管理部门规定的标准安装监控设备,对快件收寄、投递等涉及的操作全过程以及智能快件箱周围环境等进行有效监控,并保证监控设备全天二十四小时运转,监控资料保存时间不得少于三十天。
如果只把DC-DC变换器等效为电阻,实际上由于输出滤波器的存在,它在电路中有类似积分环节的作用,使得简化模型会有比较大的误差。所以在简化模型中还应该加上滤波器,如图7所示。这样,就可以把DC-DC变换器和电池负载等效为一个滤波器和负载电阻;负载电阻的阻值与电池充电功率有关,随着充电过程的进行而变化。对于充电站,即多个直流变换器并联的共直流母线结构,可根据充电功率等效为电阻并联进行计算。
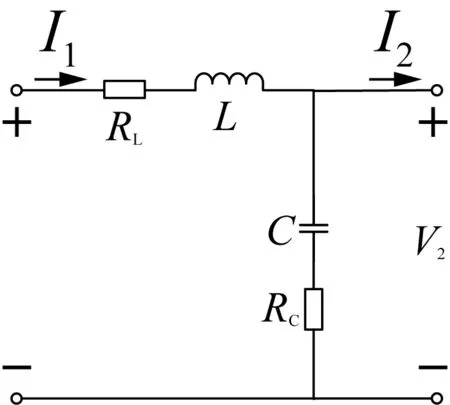
图7 DC-DC变换器输出滤波器Fig.7 DC-DC converter output filter
3 充电站参与电网调压的控制方法
电动汽车作为分布式储能单元,通过变换器并网,能够通过控制策略的设计,使其工作在如图8所示的4个象限,即其可作为动态无功调节装置,给系统电压稳定提供支撑。

图8 充电机四象限运行示意图Fig.8 Schematic diagram of the four-quadrant operation of a charger
为支撑电网电压,本文设计了如图9所示的电压下垂控制和无功功率支撑控制相结合的综合控制方法,利用电动汽车充电站的无功调节能力提升系统电压的抗扰动能力。

图9 电压下垂控制与无功支撑控制结合的控制函数图Fig.9 Control function combining the voltage droop control and reactive power support control
如图9所示,当母线残压在0.97 p.u.以上时,充电站不发无功功率;跌落至0.94~0.97 p.u.时,按照某一固定系数成比例发出无功功率;跌落至0.94 p.u.以下时,发出最大无功功率,该数值受变压器容量和整流器过流限制,如式(4)所示。
(4)
式中:U为母线电压;Q为电动汽车充电站的无功功率;kq为无功功率支撑控制斜率。
当以上电压支撑控制不能满足系统调压需求时,则采用电压下垂控制方式,将电动汽车充电负荷作为可控负荷,短时内减少充电功率,提高母线电压。在电压跌落程度较轻时,充电功率维持原值不变,在电压继续下降时按照某一固定比例削减充电功率,如式(5)所示。
(5)
式中:Kp为有功下垂控制斜率;Ppre为系统发生故障前一时刻的充电功率。
对于电压抬升过程,其控制方式类似,电压在1.03 p.u.以内时不吸收无功功率,超过1.03 p.u.按固定比例吸收无功功率直至达到电动汽车充电站容量的限制。
(6)
式中:S为变压器容量;id、iq分别为有功电流、无功电流。
控制框图如图10所示,稳态情况下充电机运行于单位功率因数,电压越限时,控制器将通过削减充电功率、吸收或发出无功等手段,动态改善系统电压质量。

图10 充电机控制模式切换示意图Fig.10 Schematic diagram of mode switches for a charger
4 仿真验证
4.1 简单算例系统
基于MATLAB/Simulink仿真平台,建立了电动汽车充电站简单系统模型,该充电站包含30台充电机,额定输出电压范围为300~500 V。基于此简单算例系统,分别对计及开关状态的详细模型、平均简化模型、阻抗简化模型进行动态仿真,1 s时在110 kV电源双回路出线的中点处发生三相短路故障,持续0.5 s后清除,并网点电压跌落至0.3 p.u.,三个模型在并网点处有功功率和无功功率的响应曲线如图11所示。

图11 不同详细程度充电站模型的外特性对比Fig.11 Comparison of external characteristics of charging station models with different details
根据文献[23]的误差计算方法,简化模型的精度计算结果如表1所示。计算结果表明,简化后的模型虽然均能够模拟详细模型在故障情况下的主导动态响应特性,但阻抗模型在暂态情况下的模拟精度较差,推荐使用平均简化模型。

表1 不同详细程度充电站模型的等值精度对比Tab.1 Accuracy comparisons of charging station models with different details
进一步地,基于平均简化模型,分别对嵌入和非嵌入电压下垂控制与无功支撑控制的模型进行仿真,1 s时在110 kV电源双回路出线的中点处发生三相短路故障,持续0.5 s后清除,并网点处的电压动态响应和无功功率动态响应的对比如图12所示。可以看出,未采用电压下垂控制和无功支撑控制时,故障期间的电压跌落程度比采用时严重;因此,提出的电压综合控制方法可以在三相短路故障情况下按照预定的方式,发出无功功率,支撑系统电压,改善电压抗扰能力。

图12 简单算例系统的电压调节控制效果对比Fig.12 Effects of the voltage regulation control in a simple case
4.2 IEEE 33节点配网系统
为进一步验证提出的电压下垂控制和无功支撑控制方法的有效性,将嵌入该模块的电动汽车充电站平均简化模型接入如图13所示的IEEE 33节点辐射状配电网。该系统基准电压为12.66 kV,基准容量为10 MW,网络总负荷为5 084.26+j2 547.32 kVA。

图13 IEEE 33节点配电网络Fig.13 IEEE 33-node power distribution network
在节点25接入充电站。1.5 s时12.66 kV母线电压从1 p.u.降低到0.97 p.u.,配电网在有、无电动汽车充电站动态电压控制功能时,节点2和25的电压对比分别如图14和15所示,采用电动汽车充电站电压控制功能时节点25的无功功率如图16所示。

图14 节点2电压响应曲线对比Fig.14 Voltage response curves comparison for node 2

图15 节点25的电压响应曲线对比Fig.15 Voltage response curves comparison for node 25

图16 采用电压控制时节点25的无功功率曲线Fig.16 Reactive power curve for node 25 with voltage control
由图14—16可以看出,采用提出的方法,在电压跌落时充电站能够及时发出无功功率,无论是接入点还是附近节点,都具有更好的电压性能。
另外,采用提出的控制方法,电动汽车充电站还可以平抑新能源功率波动引起的系统电压波动,防止可能的电压越限。在节点25接入1 MW的小型风电场,设置图17所示的风速波动。采用提出的方法,节点25的电压响应特性对比如图18所示。
如图18所示,采用提出的电压下垂控制和无功支撑控制方法,电动汽车充电站可以减小风电出力波动引起的电压抬升,防止电压越限。

图17 风速波动情况Fig.17 Wind speed fluctuation in five hours

图18 风速波动下节点25的电压响应曲线对比Fig.18 Voltage response curves for node 25 under wind fluctuations
5 结论
本文针对电动汽车充电机的PWM整流器、移相全桥ZVS型DC-DC变换器及电池负载的详细模型,提出平均开关模型和阻抗模型的简化方法;进一步量化分析电压波动量与无功调整量之间的关系,提出下垂控制与电压支撑控制相结合的充电站参与电网调压的控制方法。由30台充电机组成的充电站在不同电压扰动场景下对所提简化模型及控制方法进行MATLAB/Simulink仿真验证,得到如下结论。
1)单机无穷大系统中,电动汽车充电站并网点电压跌落至0.3 p.u.时,平均开关简化模型的有功动率和无功功率动态响应精度高于阻抗简化模型。
2)IEEE 33节点配网系统中,充电站并网节点发生电压暂降时,充电站可提供稳定无功支撑并抬升电压。
3)IEEE 33节点配网系统中,充电站通过无功补偿,可有效平抑由风电引起的电压抬升和波动,防止电压越限,改善系统电压质量。
本文提出的电动汽车充电机简化模型保留充电机动态特性的同时,提高了仿真速度;所提的电网调压控制方法通过调整充电站的无功输出能有效平抑电压波动,改善系统电压质量,提高电压稳定性。
猜你喜欢
科学家(2021年24期)2021-04-25
自动化学报(2019年12期)2020-01-19
电子制作(2017年19期)2017-02-02
电测与仪表(2016年1期)2016-04-12
电测与仪表(2016年2期)2016-04-12
电测与仪表(2016年7期)2016-04-12
电测与仪表(2016年4期)2016-04-11
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22