基于麦克斯韦张量法的六极外转子混合磁轴承悬浮力计算模型
2022-12-10 06:38刘钙朱熀秋
轴承 2022年12期
刘钙,朱熀秋
(1.徐州工程学院 电气与控制工程学院,江苏 徐州 221018;2.江苏大学 电气信息工程学院,江苏 镇江 212013)
与传统轴承相比,磁轴承具有无机械接触、无润滑、无磨损、寿命长、转速高、精度高等优点,从根本上创新了传统的支承形式[1]。为降低磁轴承成本,缩小其体积,文献[2]提出了三极磁轴承的概念。三极磁轴承减少了磁极个数[3],同时缓解了四极或八极磁轴承铁耗高,散热困难,传感器不易安装等问题;但三极磁轴承存在不对称性,有学者提出了在平衡位置线性关系好且耦合性小的六极磁轴承[4]。
为使磁轴承控制精确,需要建立精确的磁轴承悬浮力计算模型[5]:文献[6]基于等效磁路法建立悬浮力计算模型,可以省略一些二次项,方法简单;文献[7]在分析轴向混合磁轴承磁路以及各部分磁导的基础上,基于虚位移法建立了轴向混合磁轴承的径向悬浮力计算模型;文献[8]考虑边缘效应,基于等效磁路法建立了交流混合磁轴承的悬浮力计算模型,并进行试验验证。
上述基于等效磁路法和虚位移法的悬浮力计算模型误差较大,本文提出了一种基于麦克斯韦张量法的悬浮力计算模型,并进行了试验验证。
1 基于麦克斯韦张量法的六极外转子混合磁轴承悬浮力计算模型
1.1 轴承结构及工作原理
六极外转子混合磁轴承结构如图1所示,2个径向定子分别沿径向分布6个磁极,12个磁极均用控制线圈缠绕,产生的悬浮力实现转子稳定悬浮。该轴承有偏置和控制2种磁通:偏置磁通由永磁体沿z方向磁化产生,流动方向从永磁体的N极通过左侧定子、左气隙、转子、右气隙和右侧定子回到永磁体的另一极;控制磁通由每个磁极的控制线圈产生,只在定子的一侧流动。
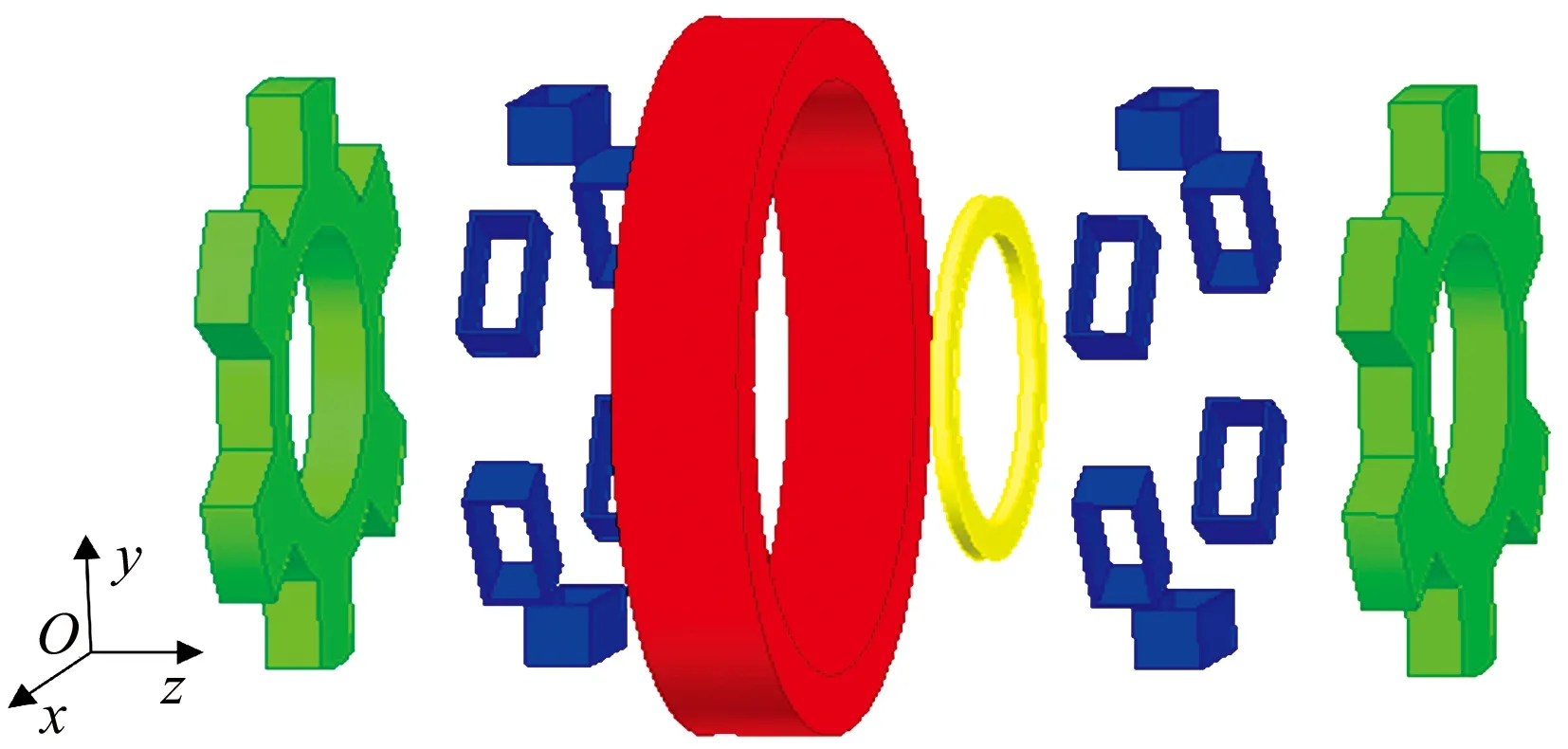
(a)三维模型
当转子不偏移时,任何气隙处的偏置磁通均相等,流动方向为径向。以A相为例,由于左、右定子的偏置磁通流动方向相反,线圈A11和A12的绕组方向相反。当正电流进入A相时,由控制线圈产生的控制磁通和偏置磁通方向相同,磁极A11的2种磁通叠加,磁极A12的2种磁通相互抵消,进而使转子和磁极A11之间产生悬浮力;当负电流进入A相时,转子和磁极A12之间产生悬浮力。B相、C相的线圈绕组和工作原理与A相相同,故可采用三相逆变器改变每相的电流值,实现对六极外转子混合磁轴承的控制。
1.2 基于麦克斯韦张量法的悬浮力计算模型
作用在空间角θ处的转子单位面积dS上的麦克斯韦力为

(1)
式中:B为磁通密度;μ0为真空磁导率;l为转子等效长度;r为转子内径。
当转子由于干扰力f位置发生变化时,空间角θ处的转子单位面积dS上所受合力Fs为


(2)
式中:f0为转子表面单位面积dS上所受的干扰力。
将转子所受的麦克斯韦力在x,y方向上分解,即
(3)
若在t时刻转子发生偏移,偏置磁场在气隙中的磁通密度可以表示为
(4)
F1=Hmlm,
δ(θ,t)=δr[1-εcos(θ-α)],
式中:F1为偏置磁场作用时产生的磁动势;δ(θ,t)为在空间角θ处的气隙长度;Hm为永磁体工作点的磁场强度;lm为永磁体沿充磁方向的长度;δr为平衡位置的气隙长度;ε为偏心率;α为偏心角。
转子位于平衡位置时偏置磁场在气隙中的磁通密度幅值为
(5)
由(4),(5)式可得
(6)
旋转磁场在任一位置的磁通密度为
(7)
F2(θ,t)=F2cos(θ-ωt-φ),
式中:F2(θ,t)为旋转磁场产生的气隙磁动势的基波分量;F2为由旋转磁场产生的气隙磁动势的幅值;ω为电流电角度;φ为转子位于磁轴承几何中心时的磁动势相位角。
磁极角度为36°,6个径向磁极上控制线圈在气隙中产生相位互差60°的磁动势,且幅值相同,即
(8)
且
(9)
式中:Nr为6个控制线圈的有效匝数;I为控制电流的幅值;p为旋转磁场的极对数。
控制线圈产生的气隙磁通密度幅值为
(10)
由(4),(7),(10)式可得
B2(θ,t)=B2cos(θ-ωt-φ)[1+εcos(θ-α)]。
(11)
根据磁场叠加原理可得磁通密度B(θ,t)由永磁体和控制线圈共同产生,即
B(θ,t)=B1(θ,t)+B2(θ,t)=
[B1+B2cos(θ-ωt-φ)][1+εcos(θ-α)]。
(12)
麦克斯韦力在x,y方向的分量可表示为
(13)
为方便计算,忽略B2的平方项,(13)式可表示为
(14)
(14)式的前项是控制电流产生的悬浮力,后项是转子偏离平衡位置时在偏置磁场中受到的麦克斯韦力。
控制电流产生的径向悬浮力Fix,Fiy为
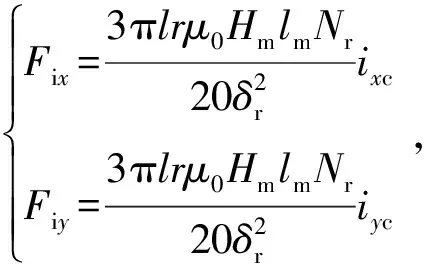
(15)
式中:ixc,iyc分别为流入三相控制线圈的三相电流经克拉克变换后在x,y方向上的电流值;N2为等效在xOy坐标系下每相控制线圈的匝数;ix,iy分别为x,y方向的控制电流;iA,iB,iC为流入控制线圈的电流值。
由于变换前后总功率不变,(15)式可转化为

(16)
偏置磁场中受到的麦克斯韦力为
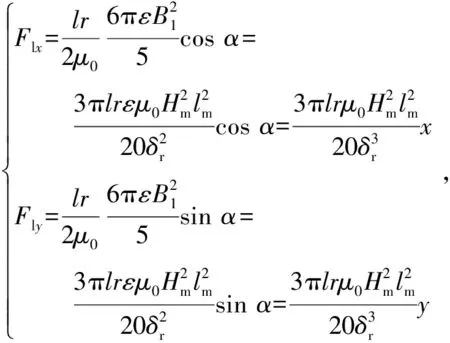
(17)
式中:x,y分别为转子在x,y方向的位移。
由于采用双片式结构,转子所受的麦克斯韦力是单片磁轴承的2倍,则六极外转子混合磁轴承x,y方向的麦克斯韦力为
(18)
2 麦克斯韦张量法和等效磁路法对比
文献[9]基于等效磁路法对六极磁轴承进行数学建模,得到x,y方向的悬浮力为
(19)
式中:Sr为磁极面积;Θm为永磁体对外部磁路的等效磁动势;N为同一相径向磁极上缠绕的径向线圈匝数之和。
(19)式变换可得
(20)
(18),(20)式的唯一区别是力电流系数不同,麦克斯韦张量法的力电流系数是等效磁路法的3/2倍。麦克斯韦张量法建模有以下优点:1)等效磁路法会忽略一些二次项参数,而麦克斯韦张量法通过积分进行建模,误差较小;2)可以通过受力分析建模,无需复杂的磁路分析过程;3)适合所有的磁轴承。故本文选用麦克斯韦张量法。
3 试验验证
磁轴承控制系统框图如图2所示,通过位移传感器检测转子位移,与期望位移对比进入PID控制器,在PID控制器中分析计算出需要调整到平衡位置所需的力,之后通过径向力电流转化模块转化为期望电流,再通过逆变器变为控制电流,对磁轴承进行控制,反复该过程,直至转子到达平衡位置。

图2 六极外转子混合磁轴承系统控制框图
根据最大悬浮力设计要求,基于麦克斯韦张量法计算结果设计的六极外转子混合磁轴承主要参数见表1。
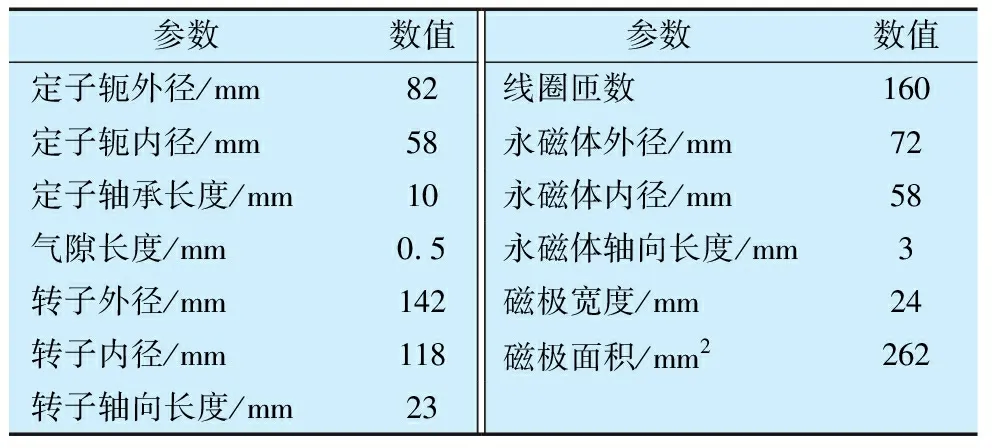
表1 六极外转子混合磁轴承主要参数
设计的六极外转子混合磁轴承试验台如图3所示,主要由电涡流位移传感器、位移信号接口电路、直流电源、径向功率驱动板、交流电源、PC机、DSP控制器组成。

1—上位机;2—直流电源;3—六极磁轴承;4—逆变器;5—DSP;6—接口电路;7—位移传感器。
DSP输入电压为0~3 V,位移传感器输出电压为-18~-2 V,通过位移信号接口电路来调节电压。首先将转子拉到x负方向最大位置贴紧定子,测得接口电路输出电压为0.3 V,然后将转子拉到x正方向最大位置贴紧定子,测得接口电路输出电压为2.3 V,说明接口电路输出电压为1.3 V时转子处于平衡位置。试验过程中转子不断抖动,说明PID参数不正确,需要在上位机调节PID参数,直至转子稳定悬浮。
为对比麦克斯韦张量法和等效磁路法,进行了悬浮力对比试验。为验证磁轴承系统的有效性,同时进行了悬浮试验、抗干扰试验以及负载试验。
3.1 悬浮力对比试验
六极外转子混合磁轴承力-电流特性曲线如图4所示,基于麦克斯韦张量法得到的悬浮力与试验值更接近,说明了基于麦克斯韦张量法悬浮力计算模型的正确性。
3.2 悬浮试验、抗干扰试验以及负载试验
六极外转子混合磁轴承转子浮动时的位移曲线如图5所示,转子在60 ms时达到稳定悬浮。受扰动时转子的位移曲线如图6所示,转子x方向的位移短暂波动,100 ms后恢复到原位置,y,z方向几乎不受影响。在x方向施加120 N载荷后,转子的位移曲线如图7所示,转子在200 ms后恢复到平衡位置,说明轴承受载后可在短时间内恢复到平衡位置,性能良好。

图6 受扰动时六极外转子混合磁轴承转子的位移曲线

图7 受载时六极外转子混合磁轴承转子的位移曲线
4 结束语
基于麦克斯韦张量法建立的六极外转子混合磁轴承悬浮力计算模型精确,且建模方法通用,若参数变化仅需更改模型中的角度即可。基于该模型设计了六极外转子混合磁轴承,并进行试验验证,该轴承可以实现稳定悬浮,且具有良好的抗干扰能力和承载能力。
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
电气电子教学学报(2022年2期)2022-05-23
中学生英语·阅读与写作(2020年2期)2020-08-07
空间科学学报(2020年2期)2020-04-01
科技风(2019年6期)2019-10-21
能源(2018年10期)2018-12-08
弹箭与制导学报(2018年1期)2018-11-13
汽车实用技术(2018年16期)2018-09-06