
一种天线相位中心偏差自动测量系统
2022-12-16 07:50曹相张杰
南京信息工程大学学报 2022年6期
曹相 张杰
0 引言
基线场是各类测距仪、接收机等现代测绘仪器进行量值传递、比对的基准,是国家经济建设、国防建设及科学研究的计量标准设施[1-2].基线场测试是实时动态测量RTK(Real Time Kinematic)等设备计量检验的关键测试环节.随着工业技术的发展,基线场使用频度越来越高,测试工作量越来越大.目前国内计量系统采用的测量方式基本为全人工测试方式,存在测试工作量大、自动化测试程度低、测试时间长、测试效率低、测试精度不足、缺乏严格的指北方法等问题[3-4].文献[5-6]对GNSS接收机天线相位中心偏差的测定方法进行了研究,文献[7-9]对基于MEMS陀螺的寻北定向技术进行了研究,但市场上尚无既能自动测量天线相位中心偏差又能自动寻北的设备.本文综合应用先进MEMS(Micro Electromechanical System)惯导技术、ARM(Advanced RISC Machine)嵌入式技术、Wi-Fi无线传输技术、高稳定性的电机传动技术和高效电源管理技术等,研制了一套具备高精度指北功能的天线相位中心偏差自动测量系统,实现了基线场天线相位中心偏差的自动化测试,具有全自动、精度高、指北准的优点.
1 系统整体设计
天线相位中心偏差自动测量系统如图1所示,包括高性能指北转台及基于ARM技术实现的转台控制器、Wi-Fi数据组网模块、电源系统以及配套的手机APP软件和后台监控软件等.整个系统可以支持多达255个测试墩,每个测试墩部署一套设备可以实现全自动测量.系统通过转台控制器,实现高精度的指北及旋转功能实现测试过程.用户在现场时,可以选择手机APP直接实现对指北转台的控制和参数配置.在测试过程中,预置HTTP控制过程的以太网组件可以实现对各种测试设备的自动开关机过程.在整个系统中,高精度指北转台和转台控制器是核心的组件,是控制中枢.

图1 天线相位中心偏差自动测量系统整体设计示意Fig.1 Schematic diagram of the proposed automatic measurement system for antenna phase center deviation
2 主要部件的实现
2.1 转台结构设计
高精度指北转台承载待测的天线或一体机终端,承重能力不低于10 kg.转台通过线缆和转台控制器连接,接收控制器的旋转指令,并反馈当前的角度、角加速度等信息.
高精度指北转台的设计方案如图2所示,主要包括同心轴夹具、步进电机、传动装置、陀螺仪模块和强制对中底座等.陀螺仪模块指北是基于大地磁场进行的,因此在转台设计中必须采用无磁材料实现.另外,在陀螺仪算法中对固定的磁场进行校准去偏操作,进一步提高系统精度.

图2 高精度指北转台结构示意Fig.2 Schematic diagram of high-precision north pointing turntable structure
2.2 转台控制器
转台控制器部署在测试墩位,控制转台实现指北和角度旋转,并能通过Wi-Fi模块和后台控制软件进行交互,是整个系统智能化的核心部分.
转台控制器的逻辑框图如图3所示,主要实现陀螺仪指北、角度旋转、接收机控制等功能.转台控制器通过驱动转台360°旋转,测试工作区域磁场情况,通过去偏算法排除固定的磁场误差,实现指北.在指北过程中,利用卡尔曼滤波算法对陀螺芯片的角度、速度及加速度数据进行滤波和数据融合,进一步提高指北的精度.根据事先配置的测试参数,按照时间要求进行相应的90°、180°、270°旋转操作.由于采用高性能的电机伺服驱动算法,实现了电机的柔性启停动作,可以有效保证旋转精度.接收机型号多样,在测试过程中需要对设备进行重启动作.为实现自动化测试过程,必须能够远程控制接收机的重启过程.转台控制器采用DM9000为核心的以太网模块,内置TCP/IP协议,针对市场上主流的接收机,预定义了其重启的HTTP交互过程,从而实现了接收机的可靠远程控制.

图3 转台控制器模块组成Fig.3 Composition of turntable controller module
转台控制器由大容量锂电池、电源管理模块、Wi-Fi通信模块、主控模块组成,其中主控模块中实现了陀螺仪控制、电机驱动、HTTP控制等诸多核心算法.主控模块采用Cortex M0的ARM芯片实现.
2.3 高精度指北算法
如图4所示,陀螺仪、ARM处理器和电机形成了高精度指北的工作链路.陀螺仪以大地磁场为测试基准,结合集成的加速度计,进行AD采样后,通过卡尔曼滤波器进行数据融合,实现高精度指北,最后驱动电机到达指定角度位置.

图4 转台指北工作链路Fig.4 Working link of turntable north pointing
本系统采用卡尔曼滤波器实现磁场指北数据、加速度计数据的有机融合处理,并设计了专用的反向纠偏算法对陀螺仪进行学习纠偏[7-10],其原理是利用高稳定电机伺服算法产生的高精度,反馈实现对陀螺仪的反向纠偏,从而克服漂移问题,有效地提高了系统的指向精度.设计的高精度指北转台工作流程如图5所示,通过陀螺仪校准[11-13]、电机旋转、不同位置的反向纠偏等,充分利用陀螺仪内部的速度、加速度等传感器,结合卡尔曼融合滤波,消除磁场干扰,提高指北精度.

图5 高精度指北转台工作流程Fig.5 Work flow of high-precision north pointing turntable
2.4 工作流程设计
天线相位中心偏差自动测量系统的操作流程和步骤如图6所示.采用该系统,测试人员在开始测试时,将转台和控制器安装在待测设备的特定位置后,开启系统,则系统开始全自动测试.所有测试完成后,测试人员收到软件提醒,即表明测试完毕.与目前在南京市计量监督检测院楼顶的基线场测试场景对比,采用本系统后测试过程可在楼下实验室远程实时分析处理和监控.显然,采用本套系统可大大降低测试重复度、提高测试精度,显著提高测试效率,有效降低人力成本.
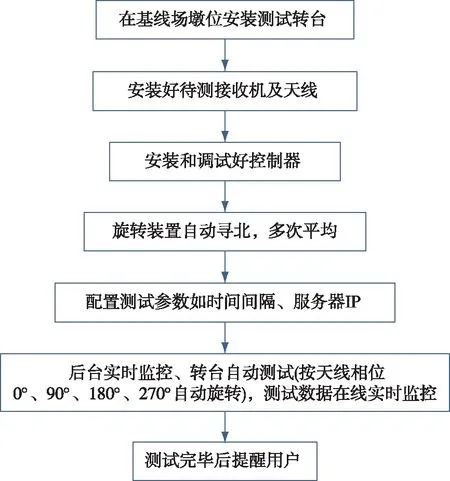
图6 天线相位中心偏差自动测量系统工作流程Fig.6 Work flow of automatic measurement system for antenna phase center deviation
2.5 通信协议设计
通信协议主要包括两个部分:一是手机APP和主控制器之间的通信协议,完成手机APP对主控制器的配置,包括IP地址、端口、偏移量、旋转角度、Wi-Fi账户和密码等功能;二是后台控制软件和主控制之间的通信协议,实现后台控制软件对天线测试系统的实时监测,包括工作状态、旋转角度等信息的监测和旋转角度、等待时间、启停等参数的控制.
协议的交互模式采用主从应答式,即由手机APP或后台控制软件发起命令,天线测试主控制器收到命令进行相应处理后返回应答信令.后台控制软件和转台控制器界面发出“启动请求”后,转台控制器执行启动转台的响应操作,并给出操作响应结果;在操作中采用差错控制,并给出相应提示.转台控制器将转台的状态(实时位置、进度、启停状态等)定期反馈给后台控制软件进行显示.

图7 天线相位中心偏差自动测量系统Fig.7 Physical diagrams of automatic measurement system for antenna phase center deviation
多台转台控制器和后台管理软件服务器之间采用C/S主从控制机制,由后台管理软件服务器主动发起轮询指令,转台控制器被动响应,双方采用UDP协议进行通信.转台控制器启动后在回复阶段向后台管理软件服务器注册自己的IP地址和物理地址,然后等待后台管理软件服务器主动联络,不能主动联系后台管理软件服务器.
转台与手机APP之间通信协议主要用于手机APP设置转台的Wi-Fi账号和密码、IP地址和端口号等参数.转台内置Wi-Fi,有默认的账号和密码.在配置参数时,手机APP连接到转台内置的Wi-Fi实现手机APP与转台的通信,设置转台的工作Wi-Fi账号和密码,该Wi-Fi账号和密码是后台管理软件服务器所在网络的Wi-Fi账号和密码,在野外工作时,可用手机热点作为该Wi-Fi使用.设置完成后,转台连接到工作环境与后台管理软件服务器进行交互通信.
3 测试及结果
天线相位中心偏差自动测量系统集成在35 cm×30 cm×30 cm的手提箱内,便于携带,质量不到10 kg,如图7所示.
转台旋转精度测试结果如表1所示.从测试结果看,转台的旋转精度误差在0.1°以内.

表1 转台旋转精度测试结果
7部转台的实际指北效果如表2所示,分别给出一个自动测试周期90°、180°、270°、360°的平均误差(横向)和不同自动测试周期的同一个角度下的平均误差(纵向).测试结果表明,指北精度均在1°以内,误差众数0.5°以内.这里的误差是与经过校准的标准指北设备(方位角测量标准装置GCT356T,精度0.5°)的指北结果进行对比的结果.
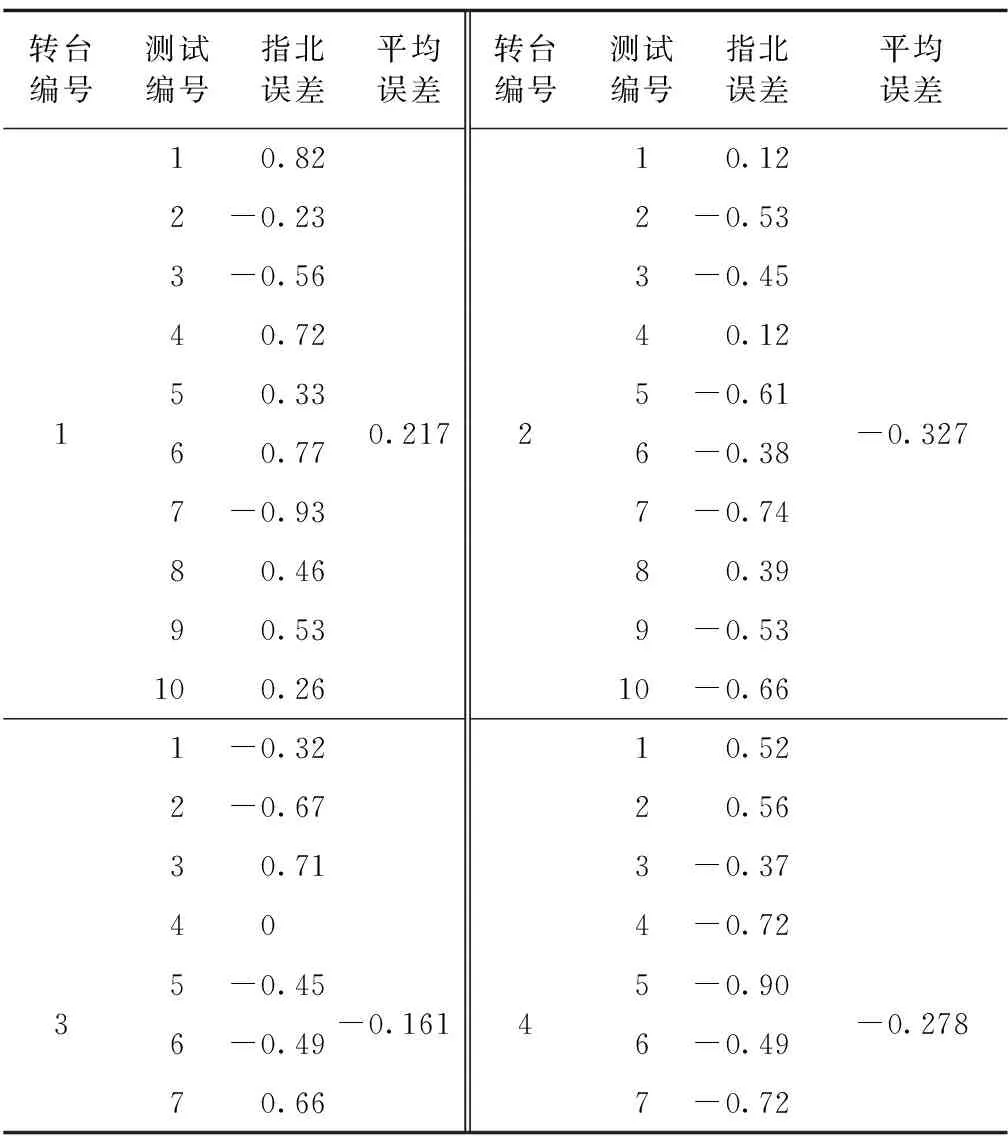
表2 转台指北精度测试结果

续表2
4 结论
天线相位中心偏差自动测量系统能够实现基线场天线相位中心误差的自动化测试,具有测试精度高、测试效率高、测试自动化程度高等优点,并具有自动寻北功能,使用简单,维护成本低,具有较高的经济和社会效益.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
文化交流(2019年1期)2019-01-11
电子制作(2018年17期)2018-09-28
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28
读者·校园版(2018年3期)2018-01-18
百科探秘·航空航天(2017年9期)2017-12-31
北京航空航天大学学报(2017年9期)2017-12-18
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
