机构与机器人学发展思考
2022-12-17 02:24刘辛军
集成技术 2022年6期
刘辛军
(清华大学机械工程系 北京 100084)
1 引 言
机构与机器人学承担着创新发明具有不同形态和功能的智能化装备的使命,是机械工程领域的基础学科,在高端制造、康复医疗、航空航天等众多领域发挥着积极的作用,机构与机器人学的良好发展是提升国家高端装备设计水平的关键。
随着工程应用的发展,越来越复杂的作业任务和环境对机器的环境适应能力和交互特性等方面提出了新的要求,机构与机器人学的研究进入多学科交叉的新阶段。机构学将面向重大需求,为高性能装备的研制提供基础理论,逐步从一般机构学、真实机构学发展到行为机构学,与生命、材料、传感、控制等学科交叉,朝着柔/软体、刚-柔-软耦合、变刚度、变形态等方向发展。机器人学则面向未来,与信息、计算、测量等学科交叉,实现移动定位局部精细化作业、人机协作和多机协同,为改善人类生活和生产方式提供有效方案。
2 内涵与意义
机构学是研究自然界中承载、传递、缩放运动/力的复杂系统组成原理的一门学科,其研究的主要目的是根据功能及性能要求发明和设计新机构。机构创新充分体现了机械装备发明的核心特征。机器人是多输入、多输出、智能化的现代高端装备系统,集成了多学科交叉融合与技术创新成果,已成为衡量一个国家科技创新和高端制造业综合竞争力的重要指标。近三十年来,各国学者在机构与机器人学领域进行了系统深入的研究。机构与机器人学在高端制造、工程机械、康复医疗、武器装备、航空航天等众多领域,发挥了无可替代的积极作用。
作为机械工程领域的重要基础学科,传统机构学的基础理论与应用技术日渐成熟,相关研究也越来越趋近于边界,机构学的研究进入解决重大工程应用需求的多学科交叉新阶段,仿生机构与机器人、折展机构与变形态机器人、智能结构与机械超材料等新形态机构与机器人层出不穷,为机构与机器人学的前沿研究注入了不竭的动力。
3 研究现状与发展趋势
18 世纪下半叶,在力学的基础上,机构学发展为一门独立的学科,其主要任务是研究自然界生命体和机器的机构组成原理,形成了以揭示“内在规律”的研究为主要目标的一般机构学。在该阶段,机构学促进了蒸汽机、挖掘机、抽油机等机器的创新发明与应用。
随着机器(如机床、机器人等)性能要求的不断提升,以及机器应用范围的不断推广,以“内在规律”研究为主的一般机构学逐渐难以满足设计需求。机构运动副的间隙、磨损、迟滞、柔性、突变等特性使机器性能的非线性和复杂度增加,给高速、高精度、高灵活性机构带来了不可忽视的影响。基于理想情况的机构学模型不能描述上述特性,从而诞生了以“行为属性”研究为主要任务的真实机构学。对真实机构学的研究,促进了多轴联动机床、超精密定位平台、机器人等现代机器的创新发明、性能提升和工业应用。
近年来,机器人及其他复杂机器的作业任务和环境复杂度急剧增加,对机器的环境适应能力和交互特性等提出了新的要求,如运动/力和能量的传递、变刚度、变形态、变拓扑等机构自身的行为,加工、行走、操作等接触行为,机器与人的交互共融和机器与外界的交互行为[1-3]。以机器人为例,轮、足、履等类型的移动机器人与地面的强适应;进行物品抓取、障碍清除、医疗手术、病人护理、星球采样等工作的作业机器人与环境/人的频繁强非线性交互;在高端制造和国防领域,机器人集群化作业需求等,要求机器人不仅自身需要具备单体高性能,而且需要具有机-机、机-人、机-环境的交互与协作能力。这使得基于“交互特性”的行为机构学研究迫在眉睫。
因此,机构学将面向战略需求,为高性能装备研制提供基础理论支持,构建并完善从一般机构学、真实机构学到行为机构学的理论体系,由刚性向柔性和软体、刚-柔-软耦合、变刚度、变形态、高灵活度等方向发展[4]。机器人领域则面向未来,为改善人类生活和生产方式提供有效方案,由单机器人向人机协作再向多机协同和移动定位局部精细化作业方向发展,协作机器人、连续体和软体机器人、仿生移动机器人、结构-感知-控制类生命机器人将成为研究热点[5-6]。机构与机器人学发展趋势如图 1 所示。
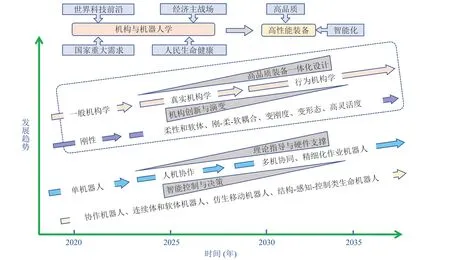
图1 机构与机器人学发展趋势Fig. 1 The developing trend of mechanisms and robotics
4 重点研究内容
4.1 行为机构学
行为机构学是以机构与机器的行为学研究为基础,揭示自然生命体和人造机器的机构组成原理,研究运动/力和能量传递机制,实现机器人与自然界行为交互,具有特定功能或性能且能完成特定工程应用的机构分析与设计理论;研究机构与机器用以适应环境(任务)变化的各种系统反应的组合,在机构自身层面,研究其变刚度、变形态、变拓扑等行为;在机器与外界交互层面,研究加工、行走、操作等接触行为,机器与人/机器交互共融等行为,探索以机器行为驱动的机构设计方法。
4.2 共融机器人
面向作业、定位、避障等多元化任务需求,提高机器人与人、环境和其他机器人的交互适应能力,通过任务驱动与数据驱动建立相应的设计、分析、控制方法与理论体系,形成共融机器人基础理论体系[7],主要体现如下。
探索人-机器人-环境之间运动与力耦合作用的多元系统模型,探明基于自然交互的人-机器人操作技能传授的有效途径,突破人、机、物共享资源的安全状态评估。
研究机器人对环境信息的获取与融合处理、对人行为意图的学习与准确判读、对人机交互协作的决策与规划控制等,实现人与机器人的深度融合与高效协作。
探究机器人对人行为意图的理解机制,实现机器人融入人的正常生产、与人合作交互,使机器人具备灵巧作业及智能决策的能力,解决机器人等高端装备与人、环境共融的核心问题。
研究分布式通信、通讯协议与架构以及环境感知机制、多机器人协调协作与任务分配机制,解决机器人间交互方法、信息共享、群体智能表现,实现复杂任务高效智能协作。
通过多种形式的人与机器人间以及机器人与机器人间的共驻空间、共享资源和协同作业,实现人类智慧与机器人技能的最大化,满足智能制造、康复医疗和国防安全等国家战略的重大需求。
5 结 语
当今世界,全球科技和产业竞争日趋激烈,大国战略博弈进一步聚焦高科技领域。机构与机器人学领域正处于承前启后、创新发展的关键时期。我国机构与机器人学界应当直面挑战、抓住机遇,继承学科发展的优良传统,以求真为导向,以谋变为发展,坚持做“面向世界科技前沿、面向经济主战场、面向国家重大需求、面向人民生命健康”的研究,用务实的科研成果为我国的创新发展做出应有的贡献。
猜你喜欢
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
作文成功之路·小学版(2019年8期)2019-09-18
人大建设(2019年4期)2019-07-13
小学生学习指导(低年级)(2019年4期)2019-04-22
电影(2018年8期)2018-09-21
读者(2017年14期)2017-06-27
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07