基于MMC-PET的永磁同步电机无源性控制驱动系统研究
2023-01-06 09:50程启明傅文倩谢怡群周雅婷叶培乐
南方电网技术 2022年11期
程启明,傅文倩,谢怡群,周雅婷,叶培乐
(上海电力大学自动化工程学院,上海市电站自动化技术重点实验室,上海 200090)
0 引言
电力电子变压器(power electronic transformer,PET)是新兴的基于电力电子技术的“绿色”电力变压器,能够灵活地变换电压和能量流动功能。与常用的变压器相比,它有功率密度高、噪声低、污染少、体积小等优点,在全世界都关注大力发展能源互联网[1]的今天,其在配电网中广泛应用已成为不可避免的趋势[2-5]。针对传统的PET拓扑已经提出许多结构,文献[6-7]针对PET的拓扑结构进行了详尽地阐述和比较,提出基于模块化多电平换流器(modular multilevel converter,MMC)型三级式结构MMC-PET具有改善电压质量、可进行有功功率交换以及增大适用范围的优势。
永磁同步电机(permanent magnet synchronous motor,PMSM)具有低惯性、结构简单、运行经济、效率高等优势,目前PET取代传统的工频变压器与变换器组合而形成的PET+PMSM已在列车牵引、风力发电等领域得到应用,从而使系统的重量轻、损耗小、控制性能强[8-9],但PET+PMSM仅适用于低压、小容量场合。为此,本文提出将MMCPET与永磁同步电机结合而构成新型的驱动系统,从而使系统适用于高压、大容量场合。
永磁同步电机驱动系统常用直接转矩控制(direct torque control,DTC)和 矢量 控 制(vector control,VC)两种方法[10]。文献[11]提出的DTC控制策略,具有谐波特性优良、较高可靠性、较高容错率的优势,但是存在功率因数低、需要输出滤波器的缺点;文献[12]提出改进Euler法离散化电流方程以及闭环预测控制,可实现电流无静差跟踪并使系统稳定性提升,但是该方法对于建立模型的要求极高,增加了工作量;文献[13]针对PMSM提出基于VC的非线性时频方法,对其鲁棒性、精确度、快速性皆有所改进,但是当电机负载转矩突变时,该方法与PI控制方法效果近似,未体现出明显的优越性;文献[14]采用独立控制定子电流分量的方法对PMSM进行控制,但所有控制器均采用PI控制器,调节参数繁多复杂,而且难以进行微调以优化整体性能;文献[15]设计了一种带自适应观测器的PMSM预测电流控制策略,虽可改善电机控制系统性能,但是相关算法复杂进而导致可靠性有所下降;文献[16-17]均提出一种将超螺旋滑模控制器应用于PMSM控制的方法,虽然在一定程度上抑制了转矩和磁链脉动现象,提高了系统的响应速度和鲁棒性,但是针对滑模控制输出存在抖动的现象未作处理,抖动到一定程度会影响整个系统的精确度;文献[18-21]均重点阐述了将模型预测控制应用于PMSM驱动系统,通过对相关算法进行不同程度的改进优化,使得PMSM系统的性能得以改善,然而采用此控制方法或多或少会面临实时性、跟踪性以及输出反馈问题。
PMSM具有高阶、非线性、强耦合的特点[22],当存在外部扰动或内部结构发生变化时,会对稳定性产生一定破坏,与上述控制方法相比,无源性控制(passivity-based control,PBC)为非线性控制策略,它通过配置系统无功分量,保障系统的控制性能[23-24]。尽管上述这些方法都有各自的特点,但它们仅适用于低电压、小功率场合,且无电气隔离,安全性低。
本文利用MMC-PET适用高电压、大功率场合、可实现电气隔离、安全系数高的优点,将MMC-PET的输出级与永磁同步电机无源性控制结合起来,设计出了一种PMSM的PBC驱动系统。首先,针对MMC-PET连接永磁同步电机建立了系统总体结构,阐述了应用MMC作输入级的优势;其次,针对VC控制中PID控制参数整定困难和控制效果不佳的问题,本文提出了无源性控制(PBC)方法,先建立了PMSM端口受控的耗散哈密尔顿(port controlled Hamiltonian with dissipation,PCHD)模型,再通过互联与阻尼分配(interconnection and damping assignment,IDA)设计适用于本系统的PBC,然后通过数学推导证明系统的渐进稳定性;最后,在仿真实验平台上进行验证,其结果表明了本文提出的基于MMC-PET的PMSM无源性驱动系统,相比于传统的结构和传统的控制策略,有着更好的鲁棒性和动态性能。
1 基于MMC-PET的永磁同步电机系统总体结构及输入级数学模型
基于MMC-PET的永磁同步电机系统总体结构如图1所示。

图1 MMC-PET连接到永磁同步电机总体结构Fig.1 Overall structure of MMC-PET connected to PMSM
MMC-PET采用输入级、中间级和输出级的3级式结构。其中:1)输入级采用MMC结构的三相整流器,高压的发电机、风机等可连接到输入级;2)中间级采用串联输入、并联输出(series input and parallel output,SIPO)的双有源桥变换器(dual active bridge converter,DAB);3)输出级采用三相全桥逆变器,输出级连接永磁同步电机。3级式结构具有可控性强、结构较为简单等优点,且此结构具有低压交直流负载、中压直流负载接口,可提高系统利用率和扩大适用范围。
MMC-PET中间级的输入级只对输出直流电压作了稳压控制而未考虑双有源桥变换器(DAB)的输入电压平衡控制,本文采用输入均压控制策略以平衡各子模块传输功率;MMC-PET输出级拓扑采用三相全桥逆变器,具有结构简单、成本低的优点,MMC-PET输出级后接永磁同步电机,并采用空间矢量调制(space vector modulation,SVM)。下面详细讨论MMC-PET输入级的结构及原理。
MMC-PET输入级采用MMC结构的高压整流器,MMC的结构框图如图2所示。
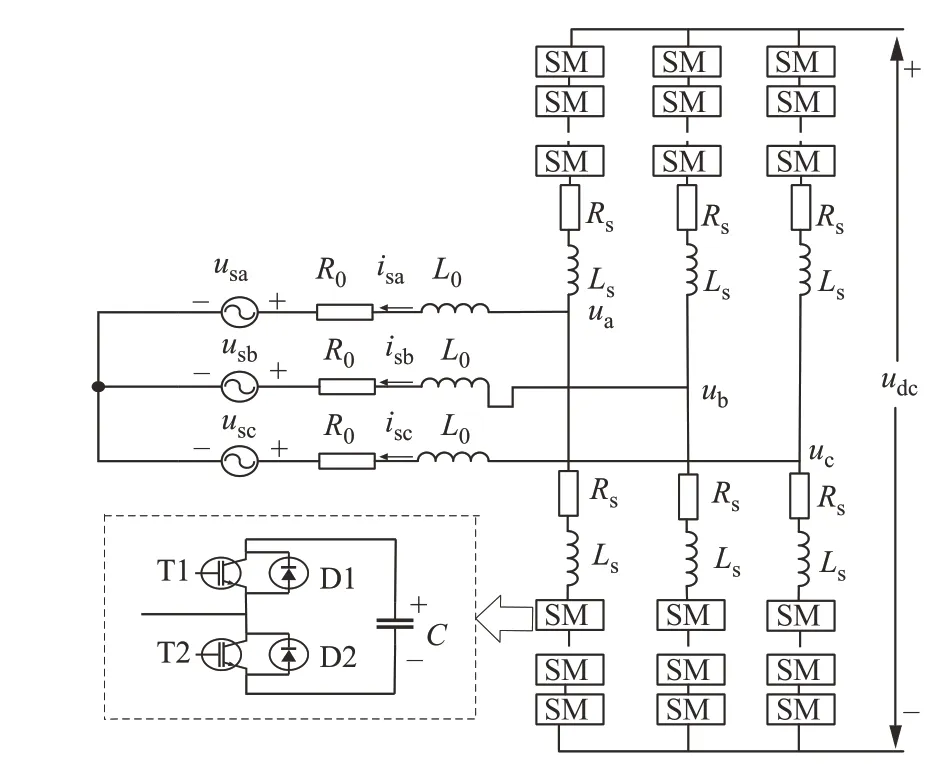
图2 MMC的结构框图Fig.2 Structure block diagram of MMC
如图2所示,三相中各相单元均由两组构造相同的上、下两桥臂组成,且各桥臂均包含1个桥臂电感Ls和n个相同子模块(sub module,SM),桥臂电感用于减弱SM电容电压动荡产生相间环流,同时减弱直流侧母线出现短路产生的冲击电流。SM为MMC的基础结构和最关键的组成部分,考虑到拓扑构造是半桥子模块SM组成简单,且需要的元件数量小且耗损更低,还可以改善系统的运行效果,因此本文SM采用半桥结构。
图2中,j=a,b,c表示三相交流中一相;usj为交流电源电压;isj为交流电源电流;u j为换流器侧的交流电压;udc为直流侧电压;R0、L0分别为交流侧电阻、电抗;ujp、u jn分别为上、下桥臂的交流电压(下标p、n表示上、下桥臂);Rs、Ls分别为桥臂的电阻、电感。
由基尔霍夫电压定理可推出MMC的交、直流侧的数学模型为:
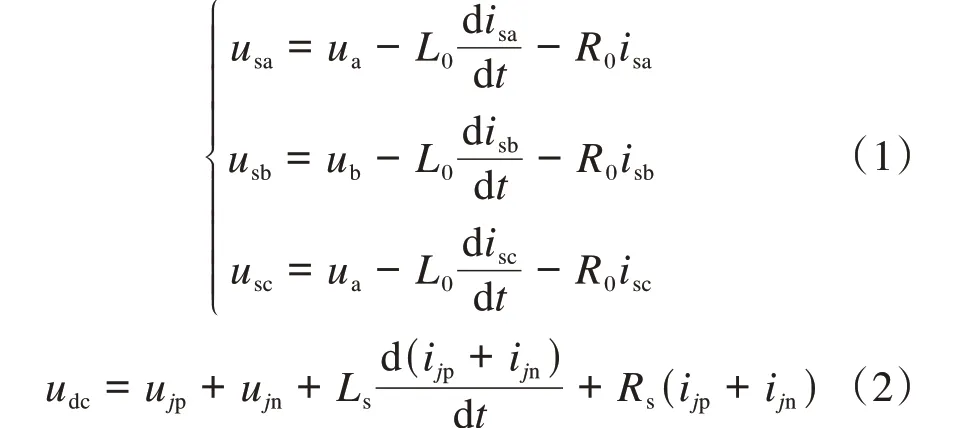
由式(1)—(2)得MMC交流侧电磁暂态方程为:

其中:
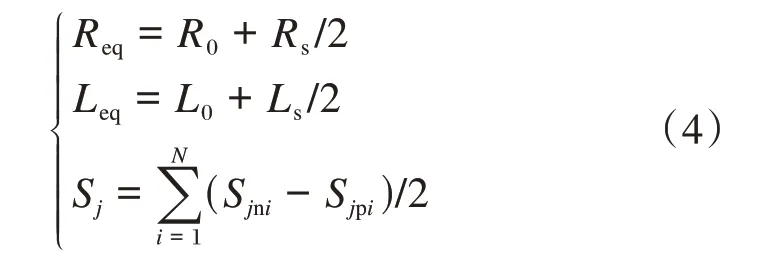
式中:N为各桥臂的子模块数量;Sj为开关控制函数;Sjni、Sjpi为上、下桥臂第i个SM的开关函数;Req、Leq分别为等效电阻、等效电感。
由式(2)可知静止坐标系下直流侧方程为:

将式(3)转换到dq轴坐标系下可得:

式中:usd、usq和isd、isq为交流电压、电流在d、q轴上分量;Sd、Sq为Sj在d、q轴上分量;ω为电网的角频率。
对式(5)求导数运算可推出:

将式(7)变换到dq轴坐标系下可得:

输入级核心控制通常采用PID控制,并加上载波移相调制、环流抑制、电容电压均衡控制等。由于这些技术较为成熟在此不作赘述[23]。
2 基于PCHD模型永磁同步电机的无源性控制方法
本节首先推出无源性控制要求写成的PCHD数学模型,接着设计出PMSM的无源性控制规律,并证明PMSM的无源性控制系统稳定性。
2.1 PMSM的PCHD数学模型
无源性控制要求系统状态方程可写成PCHD模型形式为:

式中:x、u、y为状态变量、输入变量、输出变量,且x∈R n,u、y∈R m;R(x)为端口阻尼矩阵,R(x)=-RT(x)≥0;J(x)为系统内部互联矩阵,J(x)=-J T(x);H(x)、f(x)、g(x)分别为能量存储函数、状态变量函数、输入变量系数函数。
把PMSM的数学模型推导成PCHD形式,静止坐标系下的PMSM电压方程为:

PMSM磁链方程为:

其中:

式中:下标3s表示三相abc静止坐标系;u3s为三相绕组相电压矩阵;R为电机电阻矩阵;i3s为电机电流矩阵;ψ3s、L3s、F3s(θe)分别为绕组磁链矩阵、电感矩阵和磁动势矩阵;θe、φf分别为转子电气位置角、定子磁链;Lm3、Ll3分别为定子的互感、漏感。
电磁转矩及运动方程的表达式为:


式中:ω、np、θm分别为转子机械转速、极对数、机械位置角;Te、TL分别为电磁转矩、负载转矩;J、B分别为转动惯量、阻尼系数,其中B较小,可作忽略处理。
通过变换可得到旋转坐标系下PMSM的模型为:
式中:ud、u q、id、iq和φd、φq分别为定子的电压、电流和磁链在d、q轴上分量;R为定子电阻。
定子磁链方程为:

式中:Ld、Lq为d、q轴上定子电感分量;φf为永磁体的磁链。
将式(16)代入式(15),可得dq坐标系下电压方程为:
电磁转矩方程为:

定义PMSM驱动系统的状态变量x、输入变量u、输出变量y为:

式中D为对角矩阵,D=diag{ }
L d,L q,J。
PMSM能量存储函数H(x)表达式为:

PMSM的dq数学模型用式(8)表示成PCHD模型形式为:
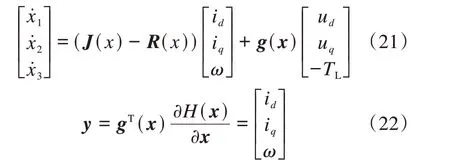
其中,

2.2 基于PCHD模型的PBC控制器设计及系统稳定性证明
为了使PMSM驱动系统稳定在平衡点x*附近,需要构建一个期望的能量函数Hd(x),并使它在x*处为最小,也即当∀x≠x*时Hd(x)>Hd(x*)。最终设计出反馈控制律u=β(x),将闭环系统表示为:

式中Rd(x)、Jd(x)分别为阻尼矩阵、互联矩阵的期望量。
涉及基于PCHD模型的PBC控制器设计的相关理论可参考文献[23-24]。
为了达到最大转矩控制的目的,矢量控制(VC)一般通过i d=0实现控制目标,如果已知电机负载,那么期望平衡点为:

式中ω*为电机转速的参考值。
取期望的Hamiltonian函数为:

由式(26)可知:

若满足x=x*的条件,则∂Hd(x)/∂x=0且∂2Hd(x)/∂x2>0,由式(27)可知,PCHD闭环系统渐进稳定条件成立,因此本文提出的无源性控制(PBC)系统在x*附近的渐进稳定性得到了证明。
2.3 PMSM控制系统的无源性控制律
针对PMSM控制系统,假设:
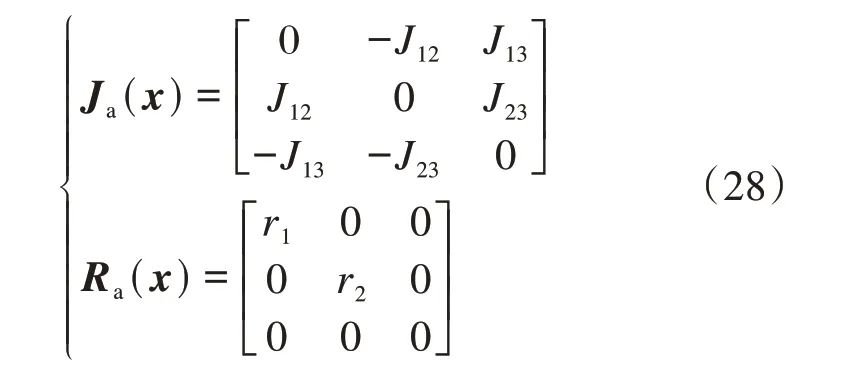
式中:J12、J13、J23和r1、r2分别为互联和阻尼参数的待定值。式(28)代入到式(24)得到:

把Jd(x)、Rd(x)、Ja(x)、Ra(x)、g(x)β(x)和x*代入可得:

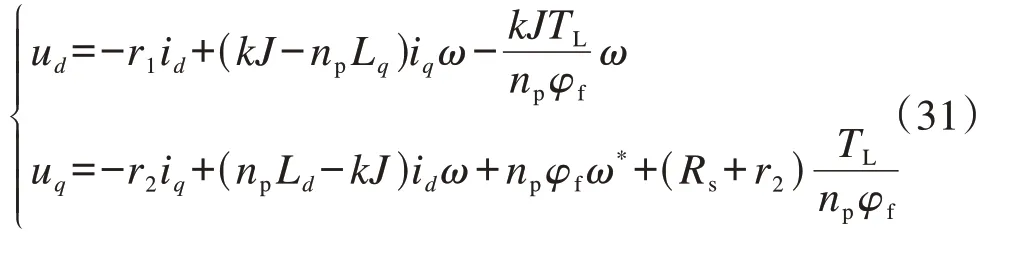
为了保证式(30)是恒成立的,取J13=(-L d/L q)n p x2、J23=-n px1、J12=-kx3(k为自由参数),上述取值对该系统的渐进稳定性无影响。把J23、J13和J12代入式(29)可推知PBC控制律为:
3 中间级输入均压控制
本文采用输入均压的控制策略,使各个有源双桥DC/DC变换器输入电压达到一致,以保证各个有源双桥DC/DC变换器之间传输功率达到一致。
首先将MMC-PET输入级输出的直流电压udcL与输出电压参考值作差,经过PI控制器后输出高频变压器一次侧H桥驱动信号超前于二次侧H桥驱动信号的时间参考值θref。其次将各个DC/DC变换器的直流侧输入电压uinj(j=1,2,…,k)与各个DC/DC变换器输入电压平均值uin(avg)分别作差,经过PI控制器,得到超前时间的修正值Δθj(j=1,2,…,k),将参考值θref与修正值Δθj作差,得到MMC-PET中间隔离级的各个DC/DC变换器实际一次侧H桥驱动信号超前于二次侧H桥驱动信号的时间,可表示为:

式中:θj为第j个DAB超前时间值;kp41、kI41分别为时间参考值的PI比例、积分系数;kP42、kI42分别第j个DAB超前时间修正值的PI比例、积分系数。
根据式(32),可得到如图3所示的中间隔离级输入均压的控制框图。
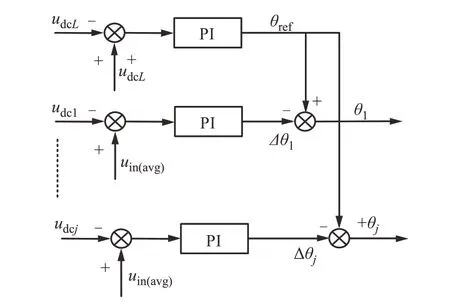
图3 MMC-PET中间隔离级输入均压的控制框图Fig.3 Control block diagram of MMC-PET input voltage equalization at intermediate isolation stage
4 实验分析
为了说明本文的MMC-PET用于PMSM的PBC驱动控制系统中性能,在仿真实验平台中对该系统进行仿真实验验证。PMSM和MMC-PET参数如表1所示。

表1 PMSM和MMC-PET参数Tab.1 Parameters of PMSM and MMC-PET
为了验证PMSM在各种运行条件下均能稳定运行,设置电机空载运行、恒速运行、变速运行、变负载运行4种工况下将基于MMC-PET的PMSM的无源性控制(PBC)驱动与PID控制驱动分别进行仿真比较。
4.1 电机空载运行
在转速设定为n*=1 000 r/min时对电机空载运行进行实验。图4为电机空载运行时实验曲线,其中图4(a)、4(b)、4(c)分别为电机转速、电机转矩、a相定子电流。

图4 电机空载运行时实验曲线Fig.4 Experimentalcurves during no-load operation of motor
在图4(a)中,与PID控制相比,无源性控制下PMSM的转速超调量明显降低,几乎接近于0,稳定时间缩短,后者比前者提速0.002 s;在图4(b)中,与PID控制相比,无源性控制下PMSM转矩波动较小、波形更为平滑,具有更好的动态性能;在图4(c)中,无源性控制下a相定子电流波形平滑,0.015 s后即稳定在0 A。
4.2 电机恒速运行
设定系统0.7s投入负载转矩TL=10 N·m、转速恒定为n*=1 000 r/min情况下对电机系统进行实验。图5为电机恒速运行时实验曲线,其中:图5(a)、5(b)、5(c)分别为电机转速、电机转矩、a相定子电流。
在图5(a)中,与PID控制相比,无源性控制下PMSM的转速超调量明显降低,几乎为0,稳定时间明显缩短,后者比前者提速0.03 s;在图5(b)中,与PID控制相比,无源性控制下PMSM转矩几乎无波动,稳定时间更短,具有更好的动态性能;在图5(c)中,无源性控制下a相定子电流波形平滑,0.01 s后即稳定于设定电流值。

图5 电机恒速运行时实验曲线Fig.5 Experimentalcurves during constant speed operation of motor
4.3 电机变速运行
系统负载转矩恒定为TL=10 N·m、转速在1.0 s由n*=1 000 r/min降为n*=400 r/min情况下对电机系统进行实验。图6为电机变速运行时实验曲线,其中图6(a)、6(b)、6(c)分别为电机转速、电机转矩、a相定子电流。
在图6(a)中,与PID控制相比,无源性控制下PMSM的转速超调量明显降低,几乎为0,抗干扰能力更强,稳定时间明显缩短,后者比前者提速0.1 s;在图6(b)中,与PID控制相比,无源性控制下PMSM转矩波动明显减小,超调量更低,具有更好的动态性能;在图6(c)中,无源性控制下a相定子电流波形较为平滑,1.05 s后即稳定于设定电流值。
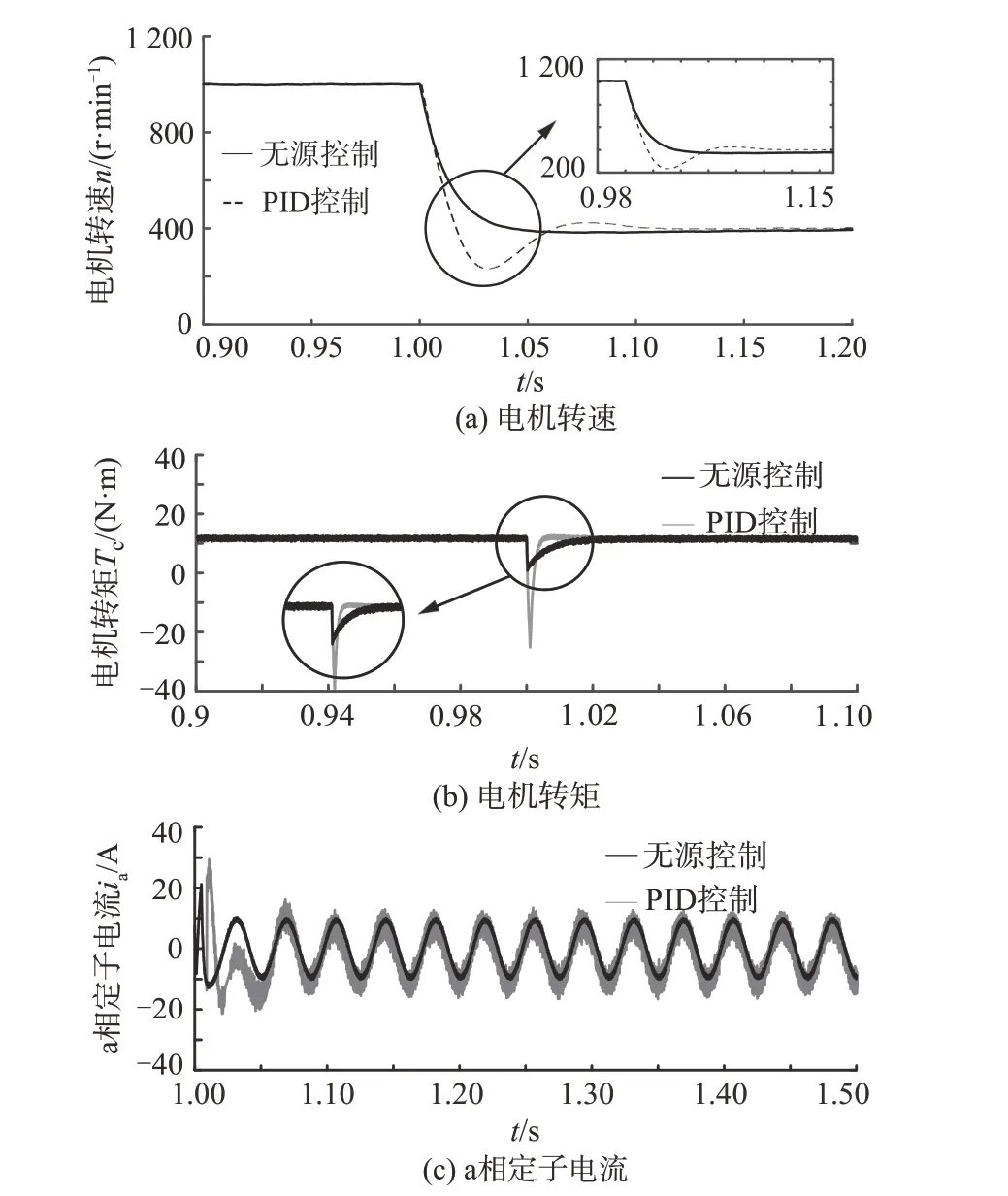
图6 电机变速运行时实验曲线Fig.6 Experimentalcurves during variable speed operation of motor
4.4 电机变负载运行
负载转矩在1.1 s时由TL=10 N·m增加为TL=15 N·m、转速设定为n*=1 000 r/min的情况下对整体系统进行实验。图7为变负载运行时实验曲线,其中图7(a)、7(b)、7(c)分别为电机转速、电机转矩、a相定子电流。
在图7(a)中,与PID控制相比,无源性控制下PMSM的转速超调量明显降低,几乎为0,抗干扰能力更强,稳定时间明显缩短,后者比前者提速0.03 s;在图7(b)中,与PID控制相比,无源性控制下PMSM转矩波动几乎没有、稳定更快,动态性能更好;在图7(c)中,无源性控制下a相定子电流波形无抖动,可达到平滑切换的效果。
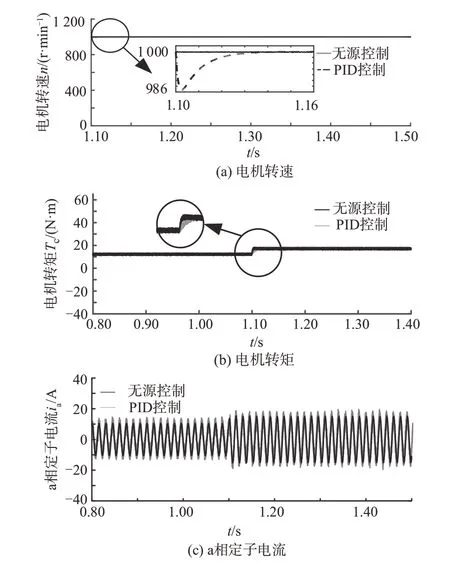
图7 电机变负载运行时实验曲线Fig.7 Experimentalcurves during variable load operation of motor
通过上面4种电机运行工况可以看出,无论是面对外部扰动还是负载变化等情况,无源性控制(PBC)都具有更快的稳定速度、更强的鲁棒性、更小的超调量,均比PID表现出更加优良的动静态特性,具有更加优良的控制效果。
5 结论
本文提出了一种基于MMC-PET的永磁同步电机(PMSM)的无源性控制(PBC)驱动系统,将MMC-PET适用于高电压、大功率电力系统的优势与PMSM无源性控制相结合,并给出了该系统的稳定性证明,对MMC-PET中间级进行了输入均压控制,最终取得了优良的控制效果。在仿真实验平台上进行了空载运行、恒速运行、变速运行、变负载运行4种不同工况的仿真验证,通过理论与实验分析得到下述结论。
1)三级式MMC-PET系统具有更高的兼容性及灵活性,在实现基本电压变换功能的同时适用于高电压、大功率场合,适用范围更广,与永磁同步电机的结合可为列车牵引、风力发电等更高电压场合提供更广阔的应用前景。
2)本文在连接永磁同步电机的MMC-PET驱动部分采用无源控制方法,通过构造期望闭环系统的互联矩阵将原系统转化为期望系统的反馈控制律,能保证期望闭环系统的PCHD模型的形式以及系统稳定性。
3)与传统的PID控制方法相比,本文所采取的无源控制策略调节参数简单、超调量较低、鲁棒性更强,具有更优越的动、静态性能,能够更好地实现电机转速和电流跟踪,进而取得更加优良的控制效果。
猜你喜欢
防爆电机(2022年4期)2022-08-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
中国特种设备安全(2022年1期)2022-04-26
防爆电机(2021年5期)2021-11-04
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09