基于故障网络状态估计的配电网故障定位方法
2023-01-06 09:51林志超陈文其彭宏亮余传坤马秋杰
南方电网技术 2022年11期
林志超,陈文其,彭宏亮,余传坤,马秋杰
(1.广东电网有限责任公司惠州供电局,广东 惠州 516000;2.广州穗华能源科技有限公司,广州 510620)
0 引言
配电网的快速故障定位,有助于实现配电网故障后供电的快速恢复,满足新时期大规模分布式电源接入配电网的供电可靠性需求[1-2]。现有的配电
网故障定位技术方案,主要依托于自动化与故障录波的形式。随着配电网接入元素的多元化与网络结构的复杂化[3-4],传统基于矩阵法[5-7]、行波法[8-10]的配电网故障定位方法面临考验。由于分布式电源容量及出力不确定情况,故障特征与运行特征变得不再明显,造成故障指示单元难以给出正确的故障信号,无法充分反映故障信息,矩阵法的0-1变量由于无法取得最原始的故障特征数据,降低了矩阵法在新能源接入情况下配电网故障定位中的应用。而行波法则面临架空线路-电缆线路混合线路应用场景中的换算困难及复杂接线下波头难以辨识等发展难题[11]。
近年来,信息通信技术的发展及配电网数字化进程不断加深[12-16],使得配电网能够大范围采集、处理海量多类型信息,包括电压、电流、功率等信息等,为配电网业务实现提供了新的思路和解决方案。低成本硬件平台的使用促成了配电网中PMU的大量使用[17],基于PMUs的应用,文献[18]基于PMU实现基于电压向量差的故障定位方法;文献[19]分析各采集装置处的电压相量特性,建立以电压相角不变为约束与电压差值最小的故障定位函数实现故障测距。文献[20]根据故障时配电网节点电压跌落和停电映射特性取得配电网故障定位。
与此同时,基于相量测量单元(PMUs)的配电网的低延迟和高刷新率实时状态估计器(SEs)得到应用[21-23],带来了基于状态估计的故障定位应用。文献[24]采用错误数据识别技术检测故障。然后利用增广状态向量和相应的雅可比矩阵估计故障位置。文献[25]通过分析同步量状态估计的残差向量来检测故障,从而获得备用保护方案。文献[26]基于全母线PMU量测,通过比较不同故障网络的状态估计结果与真实量测之间的差异程度,来实现故障定位。然而,该方案假设故障点在故障线路中心处,并由此来构造故障网络,难以取得全线路的故障定位效果,并且在进一步考虑采样异常的情况下,将无法正确取得故障定位结果,基于状态估计的配电网故障定位方法仍待进一步改进。
本文依靠配电网区域范围内电气量测的实时获取,提出了一种基于故障网络状态估计的配电网故障定位方法,将故障定位问题转化为网络物理拓扑辨识问题,并基于状态估计实现故障网络拓扑的辨识。从网络拓扑的角度,考虑到故障线路上故障点的不确定性而引起的性能降低以及故障测距能力缺失,提出了配电网故障网络的规格化描述模型,引入两端等效短路电流,来表征故障网络的特征。同时,所提方法充分发挥了状态估计原理的降噪优势,能够有效应对配电网由于复杂通信环境易造成数据异常的问题。本文方法主要贡献如下。
1)引入状态估计理论实现故障定位,将故障定位问题转化为故障网络的拓扑辨识问题,基于故障时系统状态量与对应故障网络拓扑的最优匹配实现故障定位,不受系统运行方式、网络结构和高渗透分布式电源的影响。
2)提出了规格化的故障网络模型,通过故障网络对不同元件故障情况进行统一表征,设计出面向不同故障点的规格化故障网络表示方法。
3)引入两侧注入故障电流分量为扩展状态量构建基于故障网络的状态估计模型,并建立故障测距方程,实现故障测距。
4)充分挖掘数据冗余信息价值,该方法能够有效应对配电网复杂环境下频发的数据采集和传输过程中数据异常对故障定位性能的影响。
1 配电网故障网络的规格化描述模型
1.1 配电网故障网络描述
配电网故障定位的过程,实际上是故障网络拓扑分析的过程,故障点的出现会使得配电网的网络拓扑发生变化,产生区别于正常运行状态接线的故障网络,提供配电网故障定位的思路方法。准确的故障网络刻画提供准确的故障定位性能保障。
故障网络的一般形式如图1(b)所示,以线路AB发生故障为例建立当前系统的故障网络,其中Z AB为线路阻抗,ZA f、ZB f为线路端A、B到故障点f的线路阻抗,Zf为在故障网络中故障点接入的等效电阻,与故障形式与故障过渡电阻大小相关。
此时,由故障网络的一般形式,存在以下的电气约束方程:

点A、B端的电流相量;为故障节点的故障电流;α为故障点至线路A端的百分比距离。此时,根据故障网络的一般形式,若故障点位于节点i、j之间,系统的电流-电压关系将被表示为

1.2 规格化故障网络模型
在故障网络的一般形式下,故障条件通过节点导纳矩阵的改变进行刻画,其变化量与故障的位置、形式以及阻抗大小相关。然而,配电网实际的故障条件具有随机性,实际的故障位置、形式以及过渡电阻大小不同,将产生不同的故障网络,故障条件的精准反应,需要大量的故障网络提供支持。为此提出一种规格化的故障网络模型,以消除上述不确定性的影响。
考虑到线路上任意故障点注入(流出)故障电流,可以等效成线路两端分别注入(流出)大小不同的分量故障电流,实现故障线路的外部等效,在图1(b)故障网络描述模型的基础上,可以形成规格化后故障网络如图1(c)表示。对于图1(a)的故障情况,存在以下的电气约束方程:

式中和分别为由线路A端和线路B端注入(流出)的等效故障电流分量。
与一般形式的故障网络相比,规格化后的故障网络不再受故障位置等因素影响,具有网络参数固定的特点。因此,借助规格化的故障网络可以统一表征所有发生在线路A B上的故障可能。同时,通过规格化的故障网络,系统的电流-电压关系将被表示为:

从式(6)可以看出,在故障发生在节点A、B之间时,对于规格化的故障网络,表现为注入电流产生附加的等效故障电流分量,而保持了节点导纳矩阵与正常网络的节点导纳矩阵的一致性,意味着,在规格化的故障网络表示下,同一分段的故障条件将具有统一的形式。
根据一般形式的故障网络与规格化形式的故障网络之间的相互转换关系,结合式(1)—(2)、(4)—(5),故障网络的两种表示方法之间具有以下转化关系:

由此,经过故障网络规格化后,故障点位置的不确定性及故障形式、阻抗的不确定性,将反映在两端注入的分量故障电流不平衡取值上,而保留了故障网络的唯一性。此外,基于故障电流的状态估计结果,通过式(7)—(8)可以确定故障点在故障线路的精确位置。在配电网故障区段定位的应用中,故障网络的规格化提供了标准化的故障场景。对于含N组分段的配电网系统,通过规格化的故障网络处理,将使得故障场景压缩为N组。通过N组故障网络的筛选,大大缩减故障可能情况,可提供新的故障定位思路与方法。
2 基于故障网络的配电网状态估计
2.1 计及电流量测的配电网状态估计
电力系统状态估计通过实时量测数据,结合系统的实际接线,来反映系统的状态特征。随着配电网量测形式越发丰富,涌现出除节点电压、注入功率外的其他量测条件。考虑线路电流的量测条件,拓展状态量测方程,从而有计及电流量测的配电网量测方程如下:

式中:z为量测矢量;h(x)为量测函数向量;v为量测误差矢量。其中,z=[z P,z Q,z U x,z U y,z I x,z I y]表示某一节点的量测量,其中z P和z Q分别表示有功和无功功率;z U x、z U y和z I x、z I y分别表示量测电压和量测电流复数形式的实部和虚部;该节点的状态变量表示为x=[x U x,x U y],x U x和x U y分别为状态向量电压U的实部和虚部。z P,z Q,z U x,z U y zθu分别为传统状态估计方法的注入功率及节点电压量测条件,并由这些量测条件形成的量测方程可以表示为:
式中:G和B分别为网络参数的电导和电纳;v P和v Q分别表示有功和无功的量测误差。下标i和j表示网络的节点号。

考虑线路电流量测输入,此时量测方程可进行以下扩充:

通过最小二乘法,可以取得对上述综合状态估计方程的求解,如式(13)所示:

式中:J为估计量与量测量的残差的加权平方;R为权重矩阵,由各量测条件的量测精度决定。为取得式(13)目标最小,通过求取量测雅可比矩阵并在给定初值x0处进行泰勒展开,取得Δx1如式(14)所示:

式中:h(x0)为给定初值x0的量测函数向量;H(x0)为给定初值x0的量测雅可比矩阵。
通过迭代收敛,最终取得状态估计结果,过程如式(15)—(16)所示。

式中:Δx k为第k次迭代x的修正量;H k-1和h(x k-1)分别表示第k-1次迭代时的两侧雅可比矩阵和第k-1次迭代时的量测函数向量;当|Δx k|max<ε时迭代结束,其中ε为设置的收敛阈值。
2.2 计及故障网络的配电网状态估计方法
传统的状态估计应用,通常视网络拓扑为确定的已知条件,从而获取系统的状态量估计结果。需要说明的是,所指故障条件下网络拓扑的改变,是处于故障发生后,保护动作前的故障阶段。由2.1节可知,故障条件下,配电网的网络接线发生改变,影响配电网状态估计的计算处理结果。
在故障情况下,为获得合理的状态估计结果,需要借助故障网络取代正常网络进行状态估计。在规格化故障网络条件下,故障网络的网络参数与正常网络的网络参数保持不变。因此,对于由2.1节提供的量测方程(10)—(12),将维持方程参数不变。同时在考虑故障网络条件下,量测方程计及两侧注入故障电流分量作为新的状态变量,产生量测方程的附加项,其中,假设附加的故障电流分量用x I x,A,x I y,A,x I x,B,x I y,B表示,则对于功率量测,将有:

式中Δz P,A和Δz Q,A分别为于节点A量测方程的附加项的有功和无功分量;节点B处量测方程的附加项的有功和无功分量Δz P,B、Δz Q,B可通过相同过程推导。对于节点电压及支路电流量测,有:

从而在基于故障网络拓扑条件下,进行状态估计,状态估计方程将得到以下改动:

式(19)可进一步概括为:

Δz由式(19)、(20)构成,由此,在考虑故障网络进行状态估计时,需要考虑以下量测方程修正:一是状态变量扩充,由正常网络下的状态变量构成x=[x U x,x U y],扩展为故障网络下的状态变量构成x'=[x U x,x U y,x f],其 中x f=[x f x,A,x f y,A,x f x,B,x f y,B];二是量测方程的修改,扩增由x f引起的量测附加项Δz。由此,在故障网络得到正确表征的条件下,状态估计能够计算取得故障网络的状态量结果。
3 基于故障网络状态估计的故障定位
状态估计对系统状态量的估计效果,可根据状态估计结果的残差大小进行反映,残差的总体大小通常可借助式(13)进行反映。
状态估计结果的残差情况,通常由系统的量测精度以及网络拓扑的正确刻画程度相关。量测精度越高,拓扑刻画越准确,则残差将越小。因此,若考虑系统的量测误差在合理的范围内,在采取正确的故障网络拓扑进行状态估计时,状态估计结果的残差大小将保持一个相对较小的取值,而采取错误的故障网络拓扑进行状态估计,则相应地残差大小将出现较大取值。
对于含有N各分段的配电系统,故障发生时将有N组可能的故障网络,不同的故障网络带来式(21)不同的状态估计量测方程构造:
在这些状态估计中,具有相同的量测误差项v,因此,由于量测精度导致的各组状态估计残差大致相等,残差大小主要由网络正确情况相关。因此,通过上述式(21)的各组状态估计总体残差取值,即[JAB,JCD,…]的取值大小,可刻画故障网络的匹配程度,从而发现实际的故障情况。基于故障网络的状态估计实现过程如图2所示。

图2 基于故障网络状态估计故障定位方法实现流程图Fig.2 Flow chart of fault location method based on faultnetwork state estimation
从实现流程上看,为获取含N组元件的配电系统故障定位结果,需要进行N组故障网络的状态估计,其中minJ(k),k∈N则元件k可被确认为故障元件。
借助规格化故障网络实现故障定位,具有以下特点。
1)位于统一分段的所有故障条件,包括不同的故障位置、故障形式以及故障阻抗取值,都将表现为相同的故障网络形式,因此可以大大缩减故障网络的筛选项,获得故障分段。
2)在状态估计方法下,提供了新的状态变量x f x,m,x f y,m,x f x,n,x f y,n,因 此可以在确定故 障 分 段的同时,确定故障分量的大小取值,进一步地根据式(7)—(8)所提方法具备获得故障距离的能力;
3)采取横向比较的方式对状态估计的残差大小进行匹配度刻画,此时量测误差以及量测系统可能出现的坏数据问题将由横向比较的方式获得抑制,体现出所提方法的抗坏数据能力。
4 算例分析与性能验证
算例为图3所示10 kV配电网,包含了分布式电源等新要素,参数见表1。基于PSCAD/EMTDC软件搭建了相应配网仿真模型,在不同分段设置故障,并将仿真结果作为输入数据,使用了PSCAD/EMTDC中FFT算法模块计算电压和电流的幅值和相角等信息以模拟各节点PMU的量测,作为所提算法的数据输入,在MATLAB平台上对所提出的算法进行了测试。由于实际量测存在量测误差,对PSCAD仿真结果添加了最大值为5%量测值的正态分布噪声[27]。考虑到故障条件下电流水平增高可能导致传感器量测误差增高,对故障后PSCAD仿真结果添加最大值为10%量测值的正态分布噪声。为了模拟不同因素导致的故障,覆盖各种故障类型,同时设置0Ω、100Ω、300Ω等3种不同故障过渡电阻情况进行仿真。

表1 算例主要线路参数Tab.1 Main parameter of lines of the case studied

图3 仿真算例Fig.3 Simulation case
对各节点的注入功率、节点电压及线路电流进行量测并实现状态估计,形成不同的故障网络,提取不同故障网络状态估计结果匹配度。用r来表示故障定位方法的正确率,计算方法为:

式中:Ns为在故障发生一个工频周期后的N次定位计算中,正确识别的次数;N为故障发生后时间窗内PMU相量数据传输次数。
4.1 故障定位性能验证
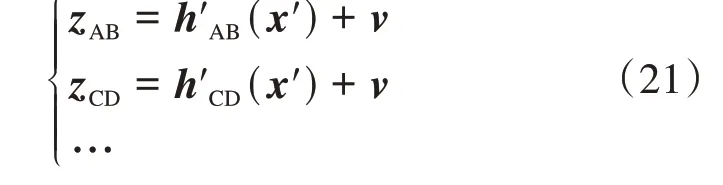
分别对线路2-7、5-6、11-13发生两相相间故障时的情况进行仿真分析,并执行故障定位算法。根据本文所提方法,线路2-7、5-6、11-13在不同位置、不同过渡电阻(0Ω、100Ω、300Ω)发生两相故障的识别结果如表2所示。
表2 故障识别准确率结果Tab.2 The fault location accuracy result %
由表2可以看出,针对不同线路区段发生故障情况,在多种过渡电阻、不同故障点位置场景下,故障识别的准确率都达到了97%以上。此外,在实际应用中,由于故障定位的实时性要求不高,可以采用多点计算结果来进行判断,以实现100%的准确率。为了更直观表明故障识别的过程,图4分别给出了在线路2-7二分之一处发生两相故障时,不同过渡电阻(0Ω、100Ω、300Ω)情况下,基于本文方法所取得的故障网络状态估计匹配度的示意图。
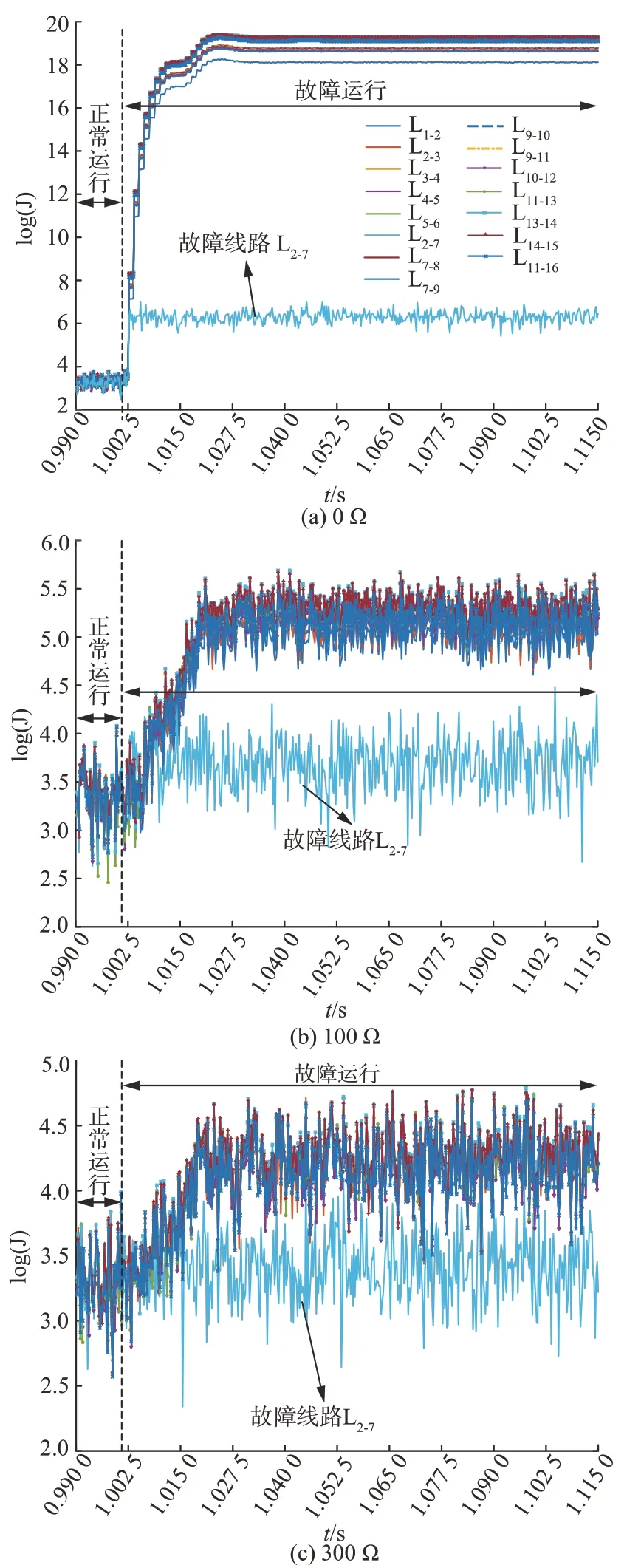
图4 不同过渡电阻下故障网络状态估计匹配程度示意Fig.4 Matching degree of fault-network state estimation for different components
为了清晰表明算法的计算过程,使用故障发生前10 ms和故障发生后115 ms(考虑现在配电网保护的动作时间情况,具体取值可根据实际保护动作时间配置调整)的数据进行所提故障定位算法的仿真计算,如图4所示。在故障发生过程中,线路2-7的故障的状态估计结果匹配程度,始终维持在较小取值水平,而对于非故障线路,状态估计结果的整体不匹配程度将高于线路2-7故障网络情况,由此可以区分出线路2-7故障情况。从测试结果可以看出,在不同的过渡电阻情况下,都能反映出线路2-7的故障定位结果。然而,随着过渡电阻的不断增高,故障特征(故障时系统的状态变量变化程度)越不明显,故障线路和非故障线路的状态估计结果的差值也不断缩小。此外,从图4中故障线路L2,7的残差变化情况可以看出,当故障发生后,由于数据误差项变大,导致状态估计的计算精度降低,残差增大。然而,由此故障过程中数据因素导致的残差变化,远小于由错误的匹配关系导致的残差变化,可以通过最小残差对应的故障网络拓扑来识别故障线路。
为了表明本文所提方法对不同故障类型,以及不同中性点运行方式的适用性,对单相故障和三相故障情况下进行故障定位仿真分析。其计算结果如表3—4所示。表3给出了中性点经消弧线圈接地和中性点不接地情况下发生单相接地故障时的计算结果,其中斜杠前为接地运行时的结果;斜杠后为不解地运行时的结果。
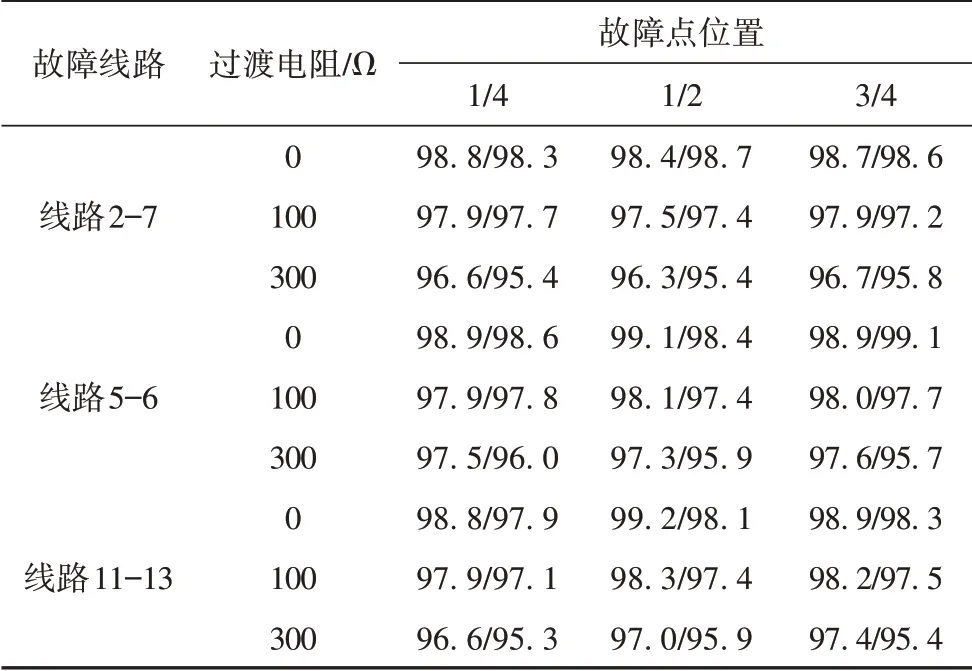
表3 中性点经消弧线圈接地和中性点不解的情况下单相故障识别准确率结果Tab.3 The 1 phase-to-ground fault location accuracy result at the earthed neutraland earthed neutral situations %
可以看出,针对不同故障类型,以及不同中性点运行方式,本文所提方法能够准确定位故障线路。此外,从几种不同故障线路识别结果来看,单相线路故障由于故障特征相对不明显,其故障识别准确率低于三相故障、两相故障和中性点接地时单相故障等场景;三相故障线路具有更显著的故障特征,其识别准确率最高。

表4 三相故障识别准确率结果Tab.4 The 3-ph fault location accuracy result %
4.2 DG对算法性能影响分析
为了分析DG对所提算法性能的影响,移除图3所示配电网中分布式电源后,对线路2-7、5-6、11-13发生两相故障时的情况进行仿真,以分析新能源电源因素对所提算法的影响,计算结果表5所示。

表5 不含DG情况下故障定位准确率结果Tab.5 The 1 phase-to-ground fault without DG location accuracy result %
可以看出,不含DG情况下所提算法故障定位准确率与含DG情况下基本相似。分布式电源接入后,对故障定位的影响主要体现在故障电流特征的变化,即可能在一定程度上增加或减小局部故障电流水平,而受物理定律约束的网络拓扑与状态量的匹配关系并不会发生改变。本文所提方法主要是通过网络拓扑与状态量的匹配关系来实现故障定位,因此取得了新能源接入前后相似的故障定位效果。
4.3 故障测距性能分析
在实现故障线路定位的基础上,基于本文所提方法,可进一步实现故障测距。由式(7)和式(8)可得,故障线路A、B两端的等效故障电流分量和的大小比值为(1-α):α,由此可得:

因此,根据状态估计结果测得的两端故障分量电流,通过式(21)即可以实现故障距离的测定。分别设置距线路2-7首端25%、50%、75%位置发生线路故障,针对线路2-7相间故障情况,计算线路2-7故障网络状态估计结果的两端故障分量电流大小的百分比值,统计结果如表6所示。

表6 故障距离分析结果Tab.6 Fault distance analysis results %
可以看出,根据本文所提方法,能够有效确定具体的故障点位置,其定位偏差也不超过5%,从而帮助巡检抢修人员快速发现故障点,完成消缺。
4.4 抗坏数据能力分析
配电网环境复杂,受采样装置自身因素和环境因素影响,在数据采集和传输过程中数据异常情况时有发生,并容易引发故障定位错误等问题,因此对配电网故障定位算法抗数据异常能力的分析至关重要。在上述仿真实验的基础上,进一步考虑数据异常出现情况,以线路2-7相间故障且过渡电阻为300Ω为例,实现含坏数据的故障行为效果测试。分别添加1~4组采样坏数据,针对不同坏数据组数,随机进行500组仿真测试(坏数据分布随机产生)。对所提方法抗数据异常能力刻画为:在给定坏数据节点数下,能够成功识别故障的次数(NB)与总随机次数(NT)的比值的百分数,如式(24)所示。含坏数据仿真测试结果见表7。

表7 抗坏数据能力仿真结果Tab.7 Simulation results of anti-bad data capability %

可以看出,即使存在4组坏数据点,故障定位成功率依然能够达到92%以上;并且在该范围内,随着坏数据数量的增大,故障定位成功率变化不大,最大的差值仅为3.7%。仿真结果表明本文所提方法具较强的抗坏数据能力。
5 结语
在配电网信息化发展的趋势下,本文充分挖掘配电网数据信息价值,提出了一种基于故障网络状态估计的故障定位方法,将故障定位问题转化为网络物理拓扑辨识问题,并基于状态估计实现对配电网故障区段的高准确度辨识及测距,总结如下。
1)提出了规格化的故障网络模型,通过故障网络对不同元件故障情况进行统一表征,设计出面向不同故障点的规格化故障网络表示方法。
2)考虑了线路电流的量测条件,拓展状态量测方程,从而构建了计及电流量测的配电网状态估计模型,以进一步挖掘冗余信息的价值,提高状态估计结果的精度。并在此基础上引入两侧注入故障电流分量为扩展状态量,构建了基于故障网络的状态估计模型,为状态估计在故障定位方面的应用提供了模型支撑。
3)提出了一种基于故障网络状态估计的故障定位方法,并考虑不同故障类型和过渡电阻对其进行了仿真测试,结果证明本文提出的故障定位方法不受各类故障因素影响,能够稳定提供高准确度的故障定位结果。
4)本文所提方法能够充分发挥配电网量测数据冗余价值,能够有效应对配电网复杂环境下频发的数据异常情况对故障定位性能的影响。
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
中学生数理化·中考版(2020年12期)2021-01-18
中学生数理化·中考版(2020年10期)2020-11-27
北京航空航天大学学报(2020年10期)2020-11-14
小学科学(学生版)(2019年10期)2019-11-16
电子制作(2019年16期)2019-09-27
自动化学报(2019年6期)2019-07-23
活力(2019年22期)2019-03-16
电子制作(2018年8期)2018-06-26