兼具发电功能的张力腿平台系统动力响应研究
2023-03-01 09:31李振眠余建星张晓铭常雪莹徐立新
船舶力学 2023年2期
李振眠,余 杨,余建星,张晓铭,常雪莹,徐立新
(天津大学a.水利工程仿真与安全国家重点实验室;b.天津市港口与海洋工程重点实验室,天津 300072)
0 引 言
多功能浮式平台具有较高的经济和环境效益,日渐成为海洋工程浮式平台设计的新潮流[1-2]。欧盟于2011 年发起了“The Ocean of Tomorrow”倡议,资助了H2OCEAN、MERMAID 和TROPOS 等三个项目[3],致力于多功能海上平台概念设计和可行性评估。2014 年,Maribe 启动了Horizon 2020(H2020)项目,研究组合不同海洋开发要素(Blue Growth Sectors)的投资前景[4]。2018 年,Space@Sea[5]和Blue Growth Farm[6]启动。其中,前者旨在建设一个可持续使用且经济效益显著的海上工作站,后者则是设计同时实现水产养殖和波浪发电的多用途海上浮式平台。更多关于多功能浮式平台的最新情况可参考文献[7-8]。已有的研究主要集中在多功能浮式平台概念创新和社会经济评价,涉及运输、能源、水产养殖和旅游休闲等用途的综合开发。本文致力于探索海洋平台与石油开采并行的其他可能性,将张力腿平台(TLP)与波浪能发电相结合,发展兼具发电功能的多功能TLP系统。
本文的研究对象为图1所示的TLP-EWEC 系统[9]。该系统包括一个TLP 本体,四个U 型振荡液柱和八个气室-涡轮组。其中,振荡液柱和气室-涡轮组组成的发电模块称为内嵌式波能发电装置(embedded wave energy converter,EWEC)。振荡液柱对称安装于TLP本体内部,其水平段中间布置有节流孔板,能够通过调整开孔率大小调整振荡液柱的阻尼大小。工作流体就地取材,选用海水。气室-涡轮组布置在振荡液柱两侧自由液面之上,气室通过狭窄的气流通道与操作间的大气相通,涡轮安装于气流通道之中。该设计为多功能TLP 系统,在TLP 正常开展油气生产作业的同时,能够实现波能发电。TLP-EWEC 系统的发电原理与传统的振荡水柱式波能发电装置(oscillating water coloum,OWC)[10]类似:在波浪载荷作用下,TLP 本体产生的运动会引起振荡液柱中流体往复运动,将增大或者减小气室体积,推动气室与外界大气进行气体交换,从而在气流通道内产生振荡气流。威尔斯(Wells)涡轮[11]适用于这样的往复振荡气流工况,能够将振荡气流的机械能转化为自身的转动动能,然后通过电机设备转化为电能。

图1 TLP-EWEC系统[8]Fig.1 TLP-EWEC system[8]
本文在文献[9]工作的基础上,重点开展TLP-EWEC 系统的动力响应分析。基于多体动力学理论、波浪力学理论和空气动力学理论,考虑平台本体有限位移、六自由度运动耦合以及气室空气压缩性等非线性因素的影响,建立系统耦合动力学方程,编写数值仿真程序开展计算。基于计算结果,对比分析工作海况和生存海况中TLP-EWEC系统与传统TLP的响应并开展不同节流孔板开孔率和气室高度敏感性分析,评估新系统的水动力性能是否满足油气生产作业要求和发电的可行性,以期为多功能浮式平台设计和海洋波浪能开发提供设计参考。
1 多体耦合动力学建模
1.1 多体动力学方程
将TLP 本体视为刚体,其空间位置用矢量q描述,即

对于平台本体上的任意一点P,其绝对坐标为

对式(2)求导,可得点P的绝对速度为



如图3 所示,对于标记为(ii=1,2,3,4)的振荡液柱,其空间位置可以通过在平台本体上的安装位置确定。定义水平段中点坐标为,长度为,截面积为;两个垂直段与水平段的交点坐标为和,液柱静平衡高度均为,截面积为;摆放的角度为αi。
假设垂直液柱内液体的瞬时液面位移为Hi,流动速度大小为,则振荡水柱内的液柱微段绝对速度为

图3 振荡液柱示意图Fig.3 Schematic model of the oscillating liquid

振荡液柱i各段液柱的动能为

式中,ρ为振荡液柱内海水的密度。

联立式(4)~(8),得到系统的动能T和势能U为

基于列拉格朗日方程有

将式(9)代入式(10),整理可得如下形式的动力学方程


1.2 外载荷矢量
TLP 本体受到的外载荷包括波浪载荷、浮力、张力腿张力、振荡液柱作用力和气室-涡轮组作用力;振荡液柱受到的外载荷包括张力腿本体作用力、沿程和局部阻力和气室作用力。其中,振荡液柱与TLP本体的相互作用力为系统内力,已包括在1.1节所述的耦合动力学模型中。
根据改进莫里森方程[13],水中单位长度微元体受到的水动力为

式中,(Cd,Ca)为阻尼和附加质量系数,(Vn,)为水质点沿微元体轴线垂直方向上的速度、加速度分量,为平台本体沿微元体轴线垂直方向上的速度和加速度分量,( dA,dV)为微元体的截面积和体积。
标记平台本体的四个立柱和四个沉箱为k(k= 1,2,…,8 ),分别沿其浸没长度lk积分可得波浪力和力矩为


标记与平台本体底部四个角落连接的四根张力腿为m( )m= 1,2,3,4 ,基于线性弹簧假设可求得张力腿m的张力和力矩分别为

式中,T0为预张力,E为杨氏模量,S为张力腿的截面积为张力腿初始长度矢量,Lm为张力腿瞬时长度矢量为从张力腿与平台本体连接点到平台本体重心的空间矢量。
对于振荡液柱i,内部工作流体流动时存在沿程水头损失和局部水头损失。局部水头损失包括由于截面变化引起的局部水头损失和节流孔板阻流产生的水头损失。与局部水头损失相比,沿程水头损失较小,可以忽略不计。则内部工作流体的水头损失[14]为

考虑振荡液柱i两侧气室-涡轮对平台本体和振荡液柱i的作用力和力矩,将气室-涡轮视为长方体,其底面与液柱相通,其余五个面固定在TLP 本体上。记振荡液柱i左侧和右侧气室内部压力为和,则气室-涡轮对平台本体的作用合力和合力矩分别为


联立式(12)~(18),并按q的每个自由度进行组装可得外载荷矢量为

1.3 气室-涡轮模型
气室振荡可视为等熵过程[11],满足气体等熵方程:

式中,γ为空气比热容,pc为气室内部压力(与式(17)中和含义一致,不区分振荡液柱编号和左右气室编号),ρc为气室内部气体密度,ρatm为大气密度。
对式(20)求导,可整理得


式中,mc为气室内气体总质量,Vc为气室气体体积。
将式(22)代入式(21)中,有

根据气室内气体质量守恒原理,气体质量的变化率等于气体流量,即

式中,a为涡轮通道横截面积,vx为涡轮通道内气流速度。
采用线性威尔斯涡轮假设[11],其压降无量纲数与流量无量纲数呈线性关系,即

式中,R为涡轮内半径,k为涡轮常数,N为涡轮转速。
联立式(23)~(25),可得到气室呼气和吸气过程中气室内部压力控制方程分别为

当涡轮系统关闭时,气室封闭,满足等温状态方程

式中,Vatm为气室初始体积。
对式(27)进行求导,可得气室内部压力控制方程为

1.4 时域数值计算方法
根据以上推导过程,多体系统动力方程、外载荷矢量以及气室-涡轮模型构成了多功能平台系统耦合动力学方程,经过整理可降阶写为

2 设计参数及数值验证
2.1 TLP-EWEC设计参数
本文选用传统式TLP(ISSC-TLP)[15]作为TLP-EWEC 系统的基本设计。假设安装的振荡液柱和气室-涡轮组不影响平台本体原有质量的分布和张力腿初始总张力,但新增结构导致平台总体吃水增大,张力腿初始长度减小。TLP-EWEC 与ISSC-TLP 的浮体和系泊的参数如表1[9]所示,TLP-EWEC 的其他参数如表2所示。

表1 TLP-EWEC和ISSC-TLP的浮体和系泊参数Tab.1 Buoy and mooring parameters of the TLP-EWEC and ISSC-TLP system

表2 TLP-EWEC计算模型参数Tab.2 Calculation parameters of the TLP-EWEC system
本文采用海浪谱描述海面,选用南海404.69 m 水深的流花油田一年一遇海况作为工作海况,波浪数据如表3所示。对于已知JONSWAP 波浪谱,采用随机相位法[17]
对合成海况进行模拟。本文聚焦的TLP-EWEC 工作海况中动力响应研究被作为TLP-EWEC 可行性分析的重要内容。关于TLP-EWEC 在生存海况(十年一遇)中的相关讨论可参考文献[9]。
2.2 TLP算例验证
本文计算程序是基于文献[9],不同的是考虑了气体的可压缩性,建立了更准确的气室-涡轮模型。TLP-EWEC 系统采用ISSC-TLP 作为平台本体,因此可以通过验证ISSC-TLP 的方法来说明TLPEWEC 水动力模型和计算程序的正确性。计算了规则波工况(波高8.0 m,周期14 s,浪向角π/8)下ISSC-TLP 平台本体六自由度运动响应,然后与文献[16]的计算结果进行对比。本文与文献[16]均考虑了平台本体有限位移、瞬时湿表面、瞬时位置、六自由度运动耦合、自由表面效应和粘性力等非线性因素的影响。对比结果如图4所示,显然本文计算结果与前人结果均吻合良好。

表3 波浪数据Tab.3 Wave data

图4 ISSC-TLP六自由度响应Fig.4 6 DOF response of ISSC-TLP
3 水动力响应分析
3.1 基本设计计算结果
为了研究工作海况下TLP-EWEC 是否满足油气生产作业要求,本文计算了EWEC-OFF,κ=0.00;EWEC-OFF,κ=1.00和EWEC-ON,κ=1.00三种状态下TLP-EWEC 的运动响应(κ为节流孔板开孔率)。其中EWEC-OFF,κ=0.00 为节流孔板关闭且气流通道关闭,振荡液柱内流体不发生运动的状态;EWEC-OFF,κ=1.00为节流孔板完全打开,但气流通道关闭,涡轮不运行的状态;EWEC-ON,κ=1.00为节流孔板完全打开,气流通道开启,涡轮运行的状态。本文以相同海况中ISSC-TLP 的运动响应作为参照,评估TLP-EWEC是否满足油气生产作业的要求。
图5 为工作海况中ISSC-TLP 和TLP-EWEC 六自由度位移和速度的时间历程曲线。通过比较可以发现,TLP-EWEC 和ISSC-TLP 的运动轨迹除纵荡、横荡和艏摇略有差别外,其他自由度响应相似。这说明虽然TLP-EWEC 和ISSC-TLP 的质量和吃水不同,但TLP-EWEC 和ISSC-TLP 的结构特性相似。另一方面,不同状态下TLP-EWEC 的运动轨迹无明显差别。这说明EWEC 的运行状态对TLPEWEC的结构水动力性能影响较小,TLP-EWEC运动性能稳定。

图5 ISSC-TLP和TLP-EWEC六自由度响应Fig.5 6 DOF responses of TLP-EWEC and ISSC-TLP
图6为工作海况中不同状态下TLP-EWEC 内部四个振荡液柱位移和速度响应时间历程曲线。当节流孔板关闭时,液柱内流体无响应。当节流孔板完全开启,流体在EWEC-OFF 时的运动响应比EWEC-ON时的小。这是因为EWEC-ON时气室不完全封闭,气室压力幅值较封闭状态小,对流体运动的阻尼作用小。从图6中可以看出,液柱位移振荡范围在±0.5 m内,速度振荡范围为±0.5 m/s。这说明工作海况中平台本体运动能有效引起振荡液柱内液面起伏造成气室振荡,保证波浪能量转换为电能。从结构整体运动看,液面位移占液柱总长度的0.95%,引起TLP-EWEC质量分布的变化很小。因此,不同状态下TLP-EWEC能够保持其原有结构性能的稳定性。这样的结构特性对于油气生产作业是有利的。

图6 TLP-EWEC内部振荡水柱运动响应Fig.6 Dynamic responses of oscillating liquid columns in the TLP-EWEC system
为进一步说明TLP-EWEC系统满足油气生产作业要求,比较工作海况中ISSC-TLP和TLP-EWEC各个自由度响应的统计值。如图7 所示,与ISSC-TLP 运动位移峰值相比,EWEC-ON 状态下,TLPEWEC 的横荡和艏摇明显减小约15%和11%,纵荡和垂荡均小幅减小约5%,横摇基本相当,纵摇则明显增大约10%;EWEC-OFF 状态下,TLP-EWEC 各个自由度的峰值比EWEC-ON 状态下小,其中横荡抑制效果最明显。EWEC-OFF 状态下,节流孔板的开启和关闭主要影响TLP-EWEC 的横荡和纵摇运动。从位移标准差上看,EWEC-ON 状态下TLP-EWEC 的纵荡和纵摇波动增大约22%和10%,垂荡和艏摇基本相当,横荡和横摇波动减小约5%和2%。EWEC-OFF 状态下,TLP-EWEC 的各个自由度波动情况与EWEC-ON 状态下相差不大,主要是EWEC-OFF,κ=1.0 时横摇波动减小约5%。由图5 可知,虽然EWEC-ON 状态下TLP-EWEC 的纵摇有所恶化,但仍为小量,对平台生产活动的影响很小。值得注意的是,EWEC-ON 状态下纵荡和纵摇位移波动的加剧,对于系泊系统和立管系统的疲劳寿命有不利影响。

图7 TLP-EWEC和ISSC-TLP六自由度响应比较Fig.7 Comparison of 6 DOFs response of ISSC-TLP and TLP-EWEC
从速度峰值和速度标准差上看,TLP-EWEC 的运动性能与ISSC-TLP 相比更为优秀。考虑的三种状态下,TLP-EWEC 的纵荡速度峰值和横荡速度峰值比ISSC-TLP 分别减小约11%和14%。EWECOFF 状态对TLP-EWEC 的横摇和纵摇速度峰值有非常明显的抑制效果,约39%和22%。同样地,EWEC-OFF 状态对TLP-EWEC 的横摇和纵摇速度波动也有非常明显的抑制效果,约45%和20%。此时,κ=1.00比κ=0.00对横摇和纵摇速度峰值和波动程度的抑制会更强。值得注意的是,EWEC-OFF,κ=0.00可能会加剧垂荡速度的波动约10%。实际操作过程中,应避免EWEC-OFF,κ=0.00状态。
基于以上分析可知:TLP-EWEC 的内嵌振荡液柱在工作海况中能产生振荡流动,液柱两端液面起伏能够造成气室的有效振荡,通过威尔斯涡轮能够转换为电能;与ISSC-TLP相比,TLP-EWEC 的位移峰值除纵摇外均被抑制,所有自由度的速度峰值均被抑制;在运动的波动情况上,TLP-EWEC 的纵荡位移和纵摇角度波动有所恶化,EWEC-OFF,κ=0.00 状态会引起垂荡速度波动的恶化。总体来看,TLP-EWEC 能在EWEC 不同启闭状态中保持较好的结构性能稳定性,能够保证油气生产活动的正常进行,与ISSC-TLP 相比具有一定优势。同时也应注意,在实际操作过程中应避免对TLP-EWEC 运动不利的状态。
3.2 不同节流孔板开孔率的影响
本节计算了工作海况中开孔率κ=0.00、0.10、0.40 和0.70 下TLP-EWEC 的运动响应。探究不同开孔率的影响,实质是探究振荡液柱阻尼的影响。图8 为EWEC-ON 和EWEC-OFF 两种状态下不同节流孔板开孔率时TLP-EWEC 六自由度运动响应统计值。参照的数据为3.1节中EWEC-ON,κ=1.00的响应数据。
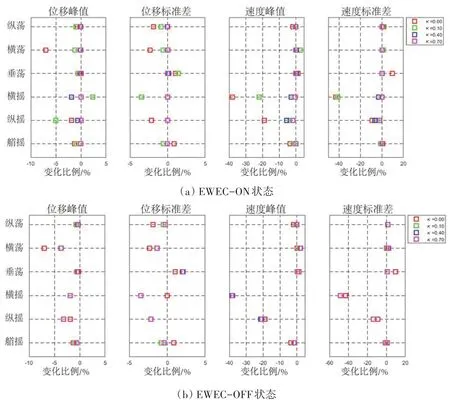
图8 不同开孔率对TLP-EWEC响应的影响Fig.8 Effects of different orifice ratios on the responses of TLP-EWEC
由图8可以看出,EWEC-ON 和EWEC-OFF 两种状态下,节流孔板开孔率对TLP-EWEC 六自由度位移峰值及位移标准差影响范围为-7%~+3%,速度峰值及速度均方差影响范围为-42%~+9%。可见,调小节流孔板开孔率基本上呈现抑制效果,个别自由度可能出现加剧效果,但加剧程度十分有限。由图8(a)可知:对于位移,κ=0.00 的情况下横荡位移峰值及其标准差分别减小7%和2.5%左右;κ=0.10的情况下横摇位移峰值则会增大约2%,但横摇位移标准差减小约4%。对于速度,κ=0.00的情况下横摇速度和纵摇速度减小明显,分别为38%和19%;对应的两个速度标准差分别减少42%和10%。κ=0.10时,横摇速度及其标准差也被有效抑制,分别减少约21%和41%。应该注意的是,κ=0.00情况下,垂荡速度标准差会加剧约10%,这容易引起系泊系统和立管系统的疲劳,对于平台的生产活动是不利的。由图8(b)中EWEC-OFF 状态的结果可知:对于位移,调小节流孔板开孔率能够抑制TLP-EWEC所有自由度的位移峰值,但会加剧垂荡位移的波动,可能会轻微加剧艏摇位移的波动。与EWECON,κ=1.00 的结果相比,κ=0.00 的情况下横荡位移峰值减小7%左右,垂荡和艏摇位移标准差分别加剧约1.5%和1%;κ=0.40 和0.70 的情况下垂荡位移峰值则会增大约2%左右。对于速度,调小节流孔板开孔率能够非常有效地抑制TLP-EWEC 横摇、纵摇和艏摇的速度峰值及波动程度,对于纵荡、横荡和垂荡速度峰值及波动程度则影响较小。其中,三个水平位移的速度峰值可能出现恶化,但范围小于2%;κ=0.00情况下垂荡速度波动加剧约10%,同样也是不利的情况,应注意避免。
另外,由公式(16)可知,振荡液柱水头损失与开孔率呈反比例关系。当开孔率接近零时,水头损失将急剧增大。如上所述,节流孔板开孔率从1.00减小到0.10时,TLP-EWEC 各个自由度的响应变化不明显,而当节流孔板开孔率从0.10减小到0.00时,响应变化才会出现较明显的变化。从发电效率来看,EWEC-ON 状态下减小节流孔板开孔率会降低振荡液柱内流体流速,进而降低发电效率。总的来看,节流孔板开孔率的减小对TLP-EWEC垂荡运动有较明显的不利影响,但对其他自由度运动基本呈现抑制状态。在实际操作过程中,在不影响平台油气生产作业的前提下,可以保持节流孔板κ=1.0,既能保证振荡液柱流动强度,也能避免节流孔板开孔率变化对垂荡运动的不利影响。
3.3 不同气室高度的影响
本节计算了工作海况中,气室高度ha=5.00、10.00、15.00 和20.00 下TLP-EWEC 的运动响应。图9为EWEC-ON 和EWEC-OFF 两种状态不同气室高度时TLP-EWEC 六自由度运动响应统计值。参照的数据为3.1节中EWEC-ON,κ=1.00的响应数据。

图9 不同气室高度对TLP-EWEC响应的影响Fig.9 Effects of different air chamber heights on the responses of TLP-EWEC
由图9(b)可以看出,EWEC-OFF 状态下气室高度对TLP-EWEC 各个自由度响应峰值和均方差影响很小。通过对比图9(a)~(b)可以知道,气室高度变化对EWEC-ON 状态的影响比EWEC-OFF 状态的影响大。当气流通道打开,涡轮运行时,系统的动力学性能更为复杂。
由图9可以看出,EWEC-ON 和EWEC-OFF 两种状态下,不同气室高度对TLP-EWEC 六自由度位移峰值及位移标准差影响范围为-6%~+12%,速度峰值及速度均方差影响范围为-38%~+15%。由图9(a)可知:EWEC-ON 状态下,气室高度对TLP-EWEC 横摇、纵摇的响应峰值和均方差影响较明显,而对其他自由度影响较小。对于横摇,位移峰值和标准差在ha=5.00 m 时均减小3%左右,速度峰值和标准差则减小约17%和29%。当气室高度增大时,抑制效果消失,横摇运动响应加剧。ha=20.00 m 时横摇位移峰值和标准差增大约12%和2%,速度峰值和标准差则增大6%和0%。对于纵摇,位移峰值在ha=15.00 m时有较明显的减小,位移标准差对气室高度不敏感。纵摇速度峰值和标准差随气室高度增大先减后增。ha=10.00 m 和ha=20.00 m 时纵摇速度峰值分别减小约4%和增大8%,速度标准差分别变化0%和+18%。应该注意的是,张力腿平台的横摇和纵摇响应幅值是微小量,上述的加剧情况并不会导致横摇和纵摇响应跨量级增长,仍然为小量,不会对张力腿平台的生产活动造成影响,如图5所示。由图9(b)可知:在EWEC-OFF 状态下,气室高度的变化对位移峰值呈现5%范围内的抑制效果,对垂荡位移标准差则有2%左右的加剧效果。对于速度,气室高度增大会略微减小纵摇峰值的增大,对其他自由度的影响则很小。
对比图9(a)和9(b),在EWEC-OFF 状态下,改变气室高度对TLP-EWEC 的运动影响好于EWECON 状态。如3.1 节中图6 所示,EWEC-ON 状态与EWEC-OFF 状态相比,气室压力幅值小,对流体运动的阻尼作用小。根据公式(26)和(28)可知,气室内部压力变化速率与气室体积呈非线性关系。一般地,增大气室高度在一定程度上会增大振荡液柱内流体的运动幅值,但会降低气室压力幅值和波动程度,对发电效率的提升不利。根据式(17)可见,气室压力幅值降低将减弱气室-涡轮对平台本体的作用合力和合力矩。总的来看,EWEC-ON 状态下气室高度的增加可能引起TLP-EWEC 横摇和纵摇的恶化,但其幅值一直处于小量级状态,对平台的油气生产作业影响十分有限;EWEC-OFF 状态下气室高度增大也会导致平台运动响应波动,但是总体上平台运动对气室高度变化不敏感。在实际操作过程中,在避免气室-涡轮浸没的前提下,保持较小气室高度,既能提升发电效率,也能避免较大气室高度对平台运动的不利影响。
4 结 论
本文针对兼具发电功能的TLP-EWEC 系统,建立了多体动力学方程并开展了工作海况中动力响应的数值仿真分析,研究了发电系统在不同运行状态下的结构整体动力稳定性,评估了其水动力响应是否满足油气生产作业条件。通过研究得到以下结论:
(1)工作海况中,TLP-EWEC 的内嵌振荡液柱能产生有效的振荡流动,液柱两端液面起伏能够造成气室的有效振荡,通过威尔斯涡轮能够将往复流动的气流机械能转换为电能。
(2)在发电系统不同启闭状态中,TLP-EWEC 具有较好的结构性能稳定性,能够保证油气生产活动的正常进行,与ISSC-TLP 相比具有一定优势。工作海况中,TLP-EWEC 的运动峰值除纵摇外均被抑制,所有自由度的速度峰值均被抑制,但纵荡位移和纵摇角度波动有所恶化,而且节流孔板关闭会引起垂荡速度波动的恶化。
(3)节流孔板开孔率的减小对TLP-EWEC 垂荡运动有较明显的不利影响,但对其他自由度运动基本呈现抑制状态,建议TLP-EWEC运行时应保持节流孔板完全打开。
(4)发电系统开启状态下,气室高度的增加可能引起TLP-EWEC 横摇和纵摇的恶化,但其幅值一直处于小量级状态;发电系统关闭状态下,气室高度增大也会导致平台运动响应波动,但是总体上平台运动对气室高度变化不敏感。
猜你喜欢
中国设备工程(2021年24期)2021-12-31
理科考试研究·高中(2020年6期)2020-06-22
时代农机(2019年8期)2019-12-27
汽车零部件(2019年5期)2019-06-13
读者·校园版(2018年22期)2018-11-01
大自然探索(2018年7期)2018-09-01
广西电力(2016年5期)2016-07-10
橡胶工业(2015年10期)2015-08-01
浙江理工大学学报(自然科学版)(2014年9期)2014-06-05
食品工业科技(2014年15期)2014-03-11