
智能驾驶汽车运动控制系统的设计
2023-04-27 13:49王本森施卫
电脑知识与技术 2023年8期
关键词:运动控制
王本森 施卫


关键词:智能驾驶;运动控制;障碍规避;最优路径规划
中图分类号:TP301 文献标识码:A
文章编号:1009-3044(2023)08-0086-03
0 引言
随着全球的进步,生活水平的提升同步着科学技术高速进步,智能驾驶在汽车的使用中备受驾驶者的青睐。其发展对于人们的出行方式具有极其便利的作用,同时未来的交通也趋向于智能化。诸多车企花费大量精力研制发展汽车智能化技术,也是推动社会进步的重要因素之一。智能汽车又称无人驾驶汽车,是通过多传感器融合、雷达测距、控制系统进行决策车辆的行驶动作,由行车系统实现无人驾驶。
智能驾驶汽车通过激光雷达测距、毫米波雷达测速测距,视觉传达算法计算、GPS/BDS定位系统共同作用,使得车辆可以自主地根据道路状况通过控制系统决策进行行驶。虽然目前的智能驾驶车辆对智能驾驶的控制已经有了很大起色,可以根据道路信号灯标识和路况车距进行自动驾驶[1]。但是这种现有的控制系统一般不能进行自主学习,无法对行驶过的道路进行有效的记录,也无法保证在智能驾驶的控制中保持获取最优与最新的道路情况信息,不能实现对汽车运动线路的精确以及最优的控制。本文阐述了一种智能驾驶汽车运动控制系统,对新的路况信息进行及时记录。
该文研究的智能驾驶汽车运动控制系统,包括摄像头探测单元、雷达探测单元、组成的信息录入模块,并且信息录入模块由自主录入模块与系统录入模块与其连接,信息录入分别连接有交通信号灯单元、道路布局管控分类汇总单元;道路布局管控分类汇总单元由道路分类、道路布局、道路是否封禁组成。道路布局管控分类汇总单元和交通信号灯单元共同组成了信息存储模块。存储模块连接中心决策模块中的分析模块和规划模块,对录入的存储信息通过道路行人车辆单元、路标和通行单元规划出最优路径,来连接汽车驾驶模块进行启动横向或纵向控制,连接互相作用来保证汽车的控制系统的完善。
1 系统总体设计
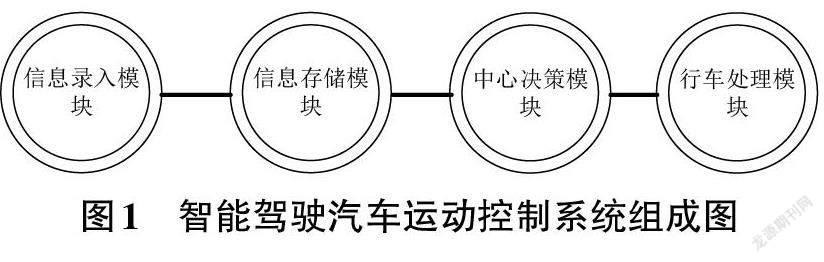
该文鉴于原有智能汽车智能驾驶控制系统上,设计一种用于智能驾驶汽车运动控制系统,该系统由信息录入模块、信息存储模块、中心决策模块和行车处理模块组成,如图1所示。
1.1 系统模块设计方案
1.1.1 信息录入模块
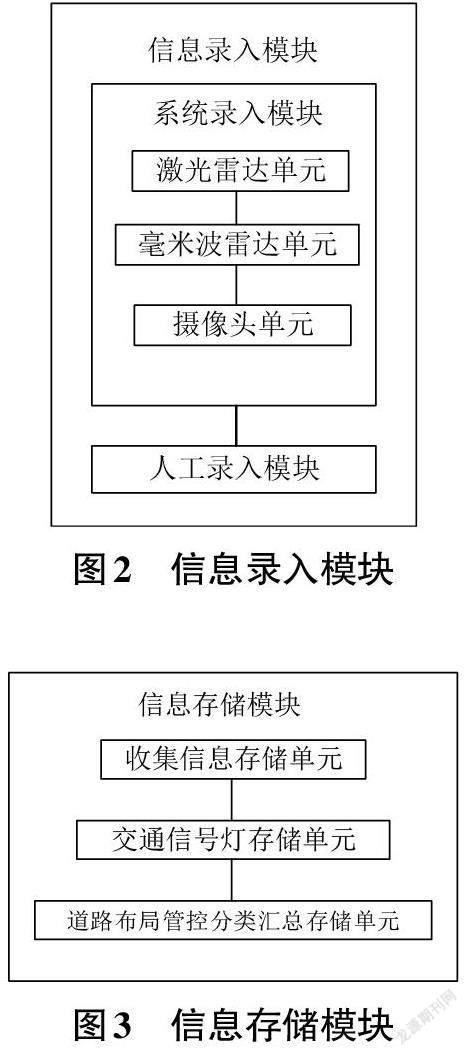
信息录入模块分为系统录入模块和人工录入模块。其中系统录入模块由激光雷达单元、毫米波雷达单元、摄像头单元组成,用于对行驶路况信息进行探测收集。激光雷达对外发射激光对周围扫射,当激光触碰到周围的物体以后,此时激光会折射回来由CMOS传感器再次接收,然后测量出本车辆与周围车辆的距离。毫米波雷达的功能常用于测量本车辆行驶的速度和与周围物体的距离,并且具有良好的距离和速度分辨率;当车辆靠近前方的障碍物时,毫米波雷达系统可以检测到反射回来的信号,并将这些信息发送给车辆的存储决策系统。摄像头是智能驾驶汽车的重要并且常用传感器,功能是监控汽车内外环境以辅助驾驶员行驶[2]。该模块对探测到的实时路况进行信息录入,一些新的没有录入的道路情况、交通信号灯情况或者道路封禁情况通过系统录入模块进行智能化录入。自主录入模块用于人工自主地对道路情况信息进行录入,如图2所示。
1.1.2 信息存储模块
信息存储模块用来接收信息录入模块的数据并将原收集信息、道路布局管控分类汇总单元、交通信号灯单元进行信息存储。由信息录入模块对收集到的实时路况信息进行存储并连接中心处理模块来处理;道路布局管控分类汇总存储单元记录各条道路、交通信号灯、封禁道路信息以及各条道路的具体性质,对普通城市道路、快速路、高速公路进行分类记录存储,最好用的一点是对系统中没有记录过的路况进行重新存储,以便下一步做中心决策处理。交通信号灯存储单元将实时变化的状态连接中心进行处理[3],对行驶过的道路进行有效的记录,从而保证在智能驾驶的控制中,始终可以保持获取最优与最新的道路情况信息,并且将道路实时变更信息存储在系统中。如图3所示。
1.1.3 中心决策模块
中心决策模块是智能车辆运动控制系统的重要模块,通过接收信息存储单元存储的数据,来进行分析计算,计算最优路径和该车当前动作。中心决策模块由系统分析模块和规划模块组成控制整车系统,其动作是这样的:信息存储模块里面存储的数据会传送给系统分析模块,系统分析模块会对传来的数据进行计算和分析,分析的对象主要有交通信号灯路标单元、周围的行人和车辆单元以及道路通行路径单元,并将数据传输给系统和行车处理模块。其中周围的行人与车辆单元用于对行车周围的人与其他车辆距离速度进行分析,道路通行单元对地图中规划的道路是否可行驶进行识别,道路路标单元用于对道路车道标志、路边限速标志等进行识别,并且将以上所有分析数据传输给系统,由规划模块进行接收。规划模块接收到以上数据后会对车辆的动作进行实时规划。主要动作有刹车、加速、更换车道、掉头等来决定车辆的运动状态,此时会把动作信息传送给系统,由行车处理模块实行。具体来讲,中心决策模块会对该车辆所有可能的动作过程进行分析计算,之后对所有可能的动作进行信息比较,选择其中最安全的规划来进行动作。并且根据规划将多个基本动作进行组合,比如加速变换车道来完成超车、减速转弯等。最后对行车节能、行车安全、路程效率、车内人员的舒适程度进行综合量化对比来选择一个最优路径[4]。如图4所示。
1.1.4 行车处理模块
行车处理模块主要作用于对车辆的实时运动的动作,连接的中心决策模块时刻进行动作或预备动作。系统接收到中心决策模块中规划模块传来的最优路径和紧急动作,同时也根据驾驶舱内驾驶员的按键指令来进行下一步运动控制。行车处理模块主由横向控制与纵向控制来实现包括紧急避让单元、道路超车单元、自适应巡航控制单元、自动泊车单元和报警单元。紧急避让单元主要作用于由规划系统传递紧急信号的接收,对实时路况的紧急事件进行刹车减速或者紧急避让。超车单元主要用来根据系统信号进行加速变道超车。自适应巡航单元基于定速巡航通过雷达、摄像头等信息獲取设备经过中心处理模块进行路况处理,如果行驶过程由于前车刹车或其他情况引起的与前车距离过小,自适应巡航单元会控制发动机或电机的转速结合车轮防抱死ABS系统联合根据实际情况进行车辆的制动,来保证行车安全。自动泊车的功能很普及也很实用,车辆可以根据驾驶员的按键需求进行实地搜索最近车位进行自动泊车,同时在此过程中车辆实时检测周围的信息来控制车速和转向[5]。最后,如果发生紧急安全事故,报警单元会第一时间报警求救。如图5所示。
1.2 智能汽车运动控制系统的实施方式
该文设计的智能驾驶汽车运动控制系统主要由以下模块组成:
1) 通过摄像头、激光雷达、毫米波雷达等感知模块将实时的路况信息和系统中未录入的道路路况信息进行信息录入,也可以人工手动记录路况以及标记道路信息传送给信息存储模块。
2) 将录入的信息进行记录存储,并且不断地传送给中心处理单元。对各个道路情况进行存储记忆,对普通城市道路、快速路、高速公路进行分类确定。重要的一点是对行驶过的道路进行有效的记录,从而保证在智能驾驶的控制中,始终可以获取最优与最新的道路信息。
3) 对数据进行分析,包括行人避障、车辆避障、交通信号灯光避障。对路线进行实时分析,然后将数据传输到规划模块,规划模块接收到以上数据后对车辆的动作进行实时规划[6]。
4) 将数据传送到行车处理模块,时刻进行动作或预备动作。行车处理模块主由横向控制与纵向控制来实现,包括紧急避让单元、道路超车单元、自适应巡航控制单元、自动泊车单元。若行车时发生安全事件,报警系统第一时间进行报警。
1.3 智能汽车运动控制系统的工作原理
本文所设计的智能汽车运动控制系统的工作原理为:整个车辆的动作原理由信息录入、存储、处理、决策动作来完成。当车辆进行启动时,组合雷达和摄像头等信号录入模块用于对实时的路况信息进行录入将其存储。对汽车行驶过的道路进行有效的记录,保证在智能驾驶的控制中,始终可以保持获取实时路况信息的实时性和准确度。当实时行车路况信息传输到中心决策模块时,系统分析模块对数据进行计算和分析,分析的对象主要有交通信号灯路标、周围的行人和车辆以及道路通行路径、行车周围的人与其他车辆距离速度,并且识别地图中规划的道路是否可行驶、道路车道标志、路边限速标志等。规划模块接收到以上数据后会选择一个最安全的道路,然后规划车辆的动作。主要有刹车、加速、更换车道、掉头等动作来决定车辆的运动状态,此时会把动作信息传送给系统由行车处理模块实行。行车处理系统会根据规划模块的数据决定车辆的走向,行车处理模块主要由横向控制与纵向控制来实现智能驾驶汽车运动控制。
该系统设置有道路布局系统、交通信号灯系统与道路管控系统,从而保证可以获取更为实时精准的道路布局、交通信号灯以及道路管控情况,并通过道路分类系统对普通城市道路、快速路以及高速路进行区分,对设置有交通信号灯的普通城市道路进行相应记录,并将各条道路情况、交通信号灯情况与道路封禁情况向道路信息汇总系统进行集中的汇总处理,然后由路线规划系统规划最优的行进线路,控制汽车驾驶系统根据规划线路行驶。同时本系统为一个共享系统,各个用户的信息将会汇总,进一步提高道路信息的全面性与准确性,保证智能驾驶汽车运动控制的精确度。
系统设置摄像头探测系统与雷达探测系统,向行车避障系统提供所探测的避障信息,由信息分析模块对要素信息进行分析然后处理车辆的动作;对新的行驶路况进行提取,从而使得将之前系统没有录入的新探测的道路情况信息进行智能录入,便于系统存储实时最新的道路信息,并有效规划线路同时对新的路况信息智能记录。根据道路结构的不同,运动控制的实现程度不同,在高速、高架和有道路标识线的结构化道路上,智能汽车可以方便地识别到车道线、车距障碍物等信息,从而较简单地识别出行驶车辆周围其他车辆的运动信息。智能汽车的主要作用场景为有道路标识线的结构化道路,比如高速公路、国道、高架、城市道路场景。运动控制的核心动作是在车辆保持安全行驶的情况下进行紧急制动、超车变道等[7]。始终把道路交通安全放首位,在此条件下车辆进行运行决策和行车处理;其次要结合驾驶员的舒适程度、行车效率多种综合因素下进行智能驾驶。
2 总结
与现有技术相比,本设计方案的有益效果是:通过摄像头探测系统与雷达探测系统,获得行车路况的障碍信息,由系统来处理决定汽车的动态走向。并且可以将之前系统没有录入的新探测的道路情况信息通过系统录入模块進行智能输入系统,或人工将相关新的未知的道路情况信息进行录入;以来解决原系统中在行驶的过程中不能对道路情况学习记忆的问题。本系统可以智能对道路情况进行记忆分类记录处理并有效规划线路,同时对新的实时路况智能记录至系统解决了传统的无记忆问题,提高了智能驾驶汽车运动控制的精确度和安全性。
猜你喜欢
现代电子技术(2014年17期)2014-09-17
现代电子技术(2014年10期)2014-07-19
