
短基线定位在结构物动态变形监测中的应用研究
2023-05-30 07:49连飞宇黄立鑫
河南科技 2023年8期
连飞宇 黄立鑫


摘 要:【目的】验证短基线定位在结构物动态变形监测中的应用效果,为测绘地理信息技术的跨界融合和应用延伸提供科学依据。【方法】通过试验模拟结构物的动态变形情况,采用GNSS接收机观测动态数据,通过TRACK动态定位模块对3个基准站和1个移动站的观测数据进行处理分析。【结果】移动站点位误差X方向为2.2 mm,Y方向为-1.7 mm;基准站最大的点位误差X方向为3.7 mm,Y方向为3.9 mm,移动站和基准站的点位精度误差均满足规范要求。【结论】GNSS短基线测量技术在结构物动态变形监测应用中具有较高的精度,可以更好地解决传统结构物动态变形监测方法速度慢、成本高及自动化程度低等问题。
关键词:GNSS;短基线;变形监测;应用研究
中图分类号:P228 文献标志码:A 文章编号:1003-5168(2023)08-0108-04
DOI:10.19968/j.cnki.hnkj.1003-5168.2023.08.022
Study on The Application of Short Baseline Positioning in Dynamic Deformation Monitoring of Structures
LIAN Fei Yu1 HUANG Li Xin2
(1. Gansu Provincial Architecture Design and Research Institute Co. Ltd, Lanzhou 730000, China; 2. Lanzhou College of Information Science and Technology, Lanzhou 730000, China)
Abstract: [Purposes] To verify the application effect of short baseline positioning in dynamic deformation monitoring of structures, which provides a scientific basis for the trans-boundary integration and application extension of surveying and mapping geographic information technology. [Methods] Through the experiment, the dynamic deformation of the structure was simulated, the GNSS receiver was used to observe the dynamic data, and the TRACK dynamic positioning module was used to process and analyze the observation data of three reference stations and one mobile station. [Findings] The error of moving site location is 2.2mm in X direction and -1.7mm in Y direction. The maximum point position error of the reference station is 3.7mm in the X direction and 3.9mm in the Y direction. The point position accuracy errors of both the mobile station and the reference station meet the requirements of the specification. [Conclusions] GNSS short baseline measurement technology has high precision in the application of structural dynamic deformation monitoring, and can better solve the problems of slow speed, high cost and low degree of automation of traditional structural dynamic deformation monitoring methods.
Keywords: GNSS;short baseline; deformation monitoring; applied research
0 引言
随着国民经济快速发展,人民生活水平显著提高,全国各地兴建了诸多高层建筑、蓄水大坝、工业烟囱及大跨径桥梁等大型工程结构物。由于工程地质、外界条件等因素的影響,工程结构物及其附属设备在施工和运营过程中经常发生整体或局部沉陷、倾斜和裂缝等变形情况,变形量超过一定的限值将会影响工程结构物的正常使用,情况严重时可能危及结构物的安全状态。因此,对大型工程结构物进行动态变形监测,可以评估其安全状态、验证设计参数和反馈施工质量,是工程施工领域重要的研究方向之一[1-3]。
全球导航卫星系统(Global Navigation Satellite System,GNSS)随着硬件设施与数据处理软件的日臻完善,集成了多传感器、伪卫星增强和多天线等数据采集方法,使测量定位的速度和精度得到了极大的提高。目前,GNSS定位技术从静态定位扩展到动态定位,从单点定位扩展到局部与广域差分定位,定位精度可以达到mm级,已广泛应用在地质灾害[4]、桥梁工程[5]、水利工程[6]及高层建筑[7]等多领域的变形监测工作中。
基于此,本研究通过试验模拟工程结构物的动态变形情况,运用GNSS定位技术获取结构物的动态变形数据,研究短基线状态下整周模糊度确定的方法和分析定位精度误差,旨在丰富GNSS定位技术中误差消除和提高精度的理论体系,为GNSS在大型工程结构物的动态变形监测工作提供科学参考,对工程结构物的动态变形风险早期识别、预报预警等工作提供重要依据。
1 GNSS定位误差分析
1.1 对流层延迟误差
GNSS测量定位中的对流层延迟通常是泛指电磁波信号在通过离地面高度50 km以下的未被电离的中性大气层时所产生的信号延迟[8-9]。研究表明,对于工作频率在15 GHz以内的微波而言,对流层使该种信号的传播路径比几何路径长,所导致的传播路径弯曲较小可忽略不计。对流层延迟导致的GNSS信号传播路径的偏差表示为式(1)。
[ΔDtrop=S-ρ=SnSds-pdρ=SnS-1ds+Sds-pdρ] (1)
式中:S为实际传播路径,ρ为几何路径,n(S)为对流层的微波折射率。
1.2 多路径效应误差
在GNSS定位测量中,被测站附近的反射物所反射的卫星信号如果进入接收机的天线,将会对直接来自卫星的信号产生干涉,导致观测值偏离真实值,产生多路径效应误差[10-11]。设直射信号、反射信号的数学表达式为式(2)和式(3)。
[Sd=Ucosωt] (2)
[Sr=αUcosωt+θ] (3)
式中:U为信号电压;ω为载波的角频率。
直射和反射信号叠加后被接收机接收,故接收机天线实际收到的信号的数学表达式为式(4)。
[Sr=βUcosωt+φ] (4)
式中:[β=1+2αcosθ+α212];[φ=tan-1][αsinθ1+αcosθ]。
实际情况中可能有多个反射信号同时进入接收机天线,则此时多路径误差的数学表达式为式(5)。
[φ=tan-1i=1nαisinθi1+i=1nαicosθi] (5)
1.3 整周模糊度动态解算
常用的动态模糊度解算方法有最优乔里斯基分解算法、最小二乘模糊度降相关平差法、直接整周模糊度搜索方法、快速模糊度解算法、快速模糊度滤波法以及用某些特殊的约束条件来确定模糊度。这些整周模糊度解算方法都适用于初始模糊度的解算,并具有最佳模糊度组合的搜索策略;但相互之间差异主要有搜索用到的观测类型、搜索区域策略以及检验标准[12-13]。
在连续跟踪而不存在整周跳变的情况下,卫星通过的载波相位观测值均含有相同的初始整周模糊度N。为了正确的解算出这个整周模糊度,在GNSS载波相位测量动态定位中,通常采用在动态之前进行一段时间的静态测量或者在已知基线上进行短时间的静态测量,利用动态定位实施之前的测量数据来确定整周模糊度,并依据无周跳时整周模糊度不变的性质,使用后续的GNSS载波相位观测值,进行高精度的动态定位解算。
2 试验分析
2.1 选择试验设备仪器
本试验主要目的是基于GNSS接收机获取模拟大型工程结构物的动态变形数据,利用GAMIT数据处理软件中TRACK模块对获取的模拟动态观测数据进行处理分析。因此,采用WS-Z30-50型振动台配套Vib’SQK软件模拟大型工程结构物的动态变形情况,如图1(a)所示;选用PENTAX G6型号的GNSS接收机观测动态数据,如图1(b)所示。
TRACK是GAMIT数据处理软件的一个动态定位模块,采用差分载波相位观测值进行动态定位,其定位解算可以得到测站每个历元的三维坐标差及单位权中误差,从而获得移动站的运动轨迹。利用TRACK对实测数据处理的目的在于单历元的解算,通过比较动态定位和静态定位不同模式下TRACK模块处理GNSS观测数据的精度,以及解算出GNSS测站记录到的振动位移和静态位移的特征。
2.2 设计试验方案
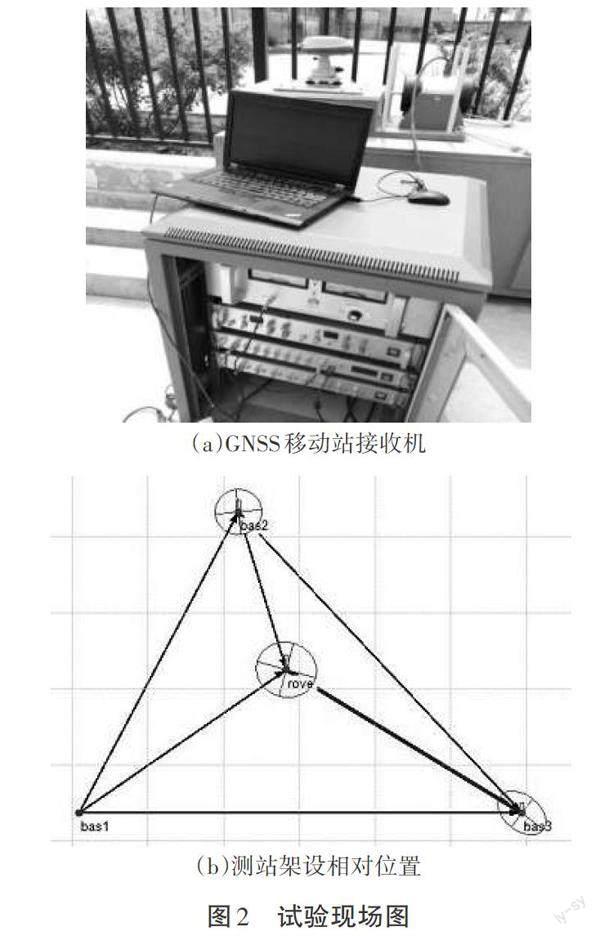
本试验观测时间为2023年1月11日,试验地点位于甘肃省兰州市,天气状况良好利于试验观测。通过Vib’SQK软件设置WS-Z30-50振动台的频率和振幅等基本参数;GNSS接收机采样间隔为1 s,卫星截止高度角为15°。试验首先将GNSS移动站接收机固定在振动平台上以测量振动台的动态数据,如图2(a)所示;基准站架设于流动站周围20 m左右位置,测站架设相对位置如图2(b)所示。
第一个观测周期,在振动台开始工作前,进行静态观测。使用4台GNSS接收机静态测量采集数据1 h,以确定整周模糊度并且确定移动站与基准站的相对位置。
第二个观测周期,在Vib’SQK软件中设置振动平台的控制频率为0.2 Hz,振幅为10 mm,振动时长为1 000 s,通过软件生成正弦波使振动平台开始振动,基准站和移动站以同样的采样频率进行数据采集;第一个振动周期结束后改变控制频率为0.1 Hz,振幅为10 mm,振动时长为1 000 s,進行重复实验观测。
2.3 数据处理与分析
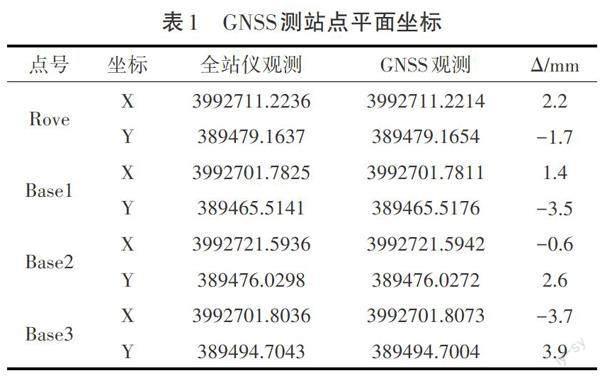
通过PENTAX接收机官方软件将第一、二观测周期接收机的观测数据转换为标准RINEX格式,基于TRACK定位模块解算整周模糊度,进行电离层误差改正、多路径误差改正和整周跳变误差改正等处理,得到移动站和基准站平面坐标,见表1。根据表1数据分析可知,移动站Rove点位误差X方向为2.2 mm,Y方向为-1.7 mm;基准站Base3的点位误差最大,X方向为3.7 mm,Y方向为3.9 mm。移动站和基准站的点位精度误差均满足规范要求的最大误差值。
结果表明,基于TRACK定位模块可以正确解算GNSS短基线观测数据的整周模糊度,有效地提高观测数据的处理精度;进一步验证了短基线定位可以更好地应用于结构物动态变形监测工作中。
3 结语
随着GNSS测量技术的日臻完善,相比傳统测绘技术其优势明显,在诸多领域得到了广泛的应用。在结构物动态变形监测方面,GNSS测量技术集成了计算机技术、数据通信技术及数据处理与分析技术,实现数据采集、传输、处理、分析及预警的数字化、自动化、信息化和智能化。在GNSS测量中采用短基线观测可以有效地减弱多路径误差等因素对定位精度的影响,实现mm级定位精度,对于高精度、高时效的结构物动态变形监测中具有重要意义。
参考文献:
[1]赵娟,白春,史青菁,等.基于改进北斗卫星导航的超高层建筑变形监测方法[J].沈阳工业大学学报,2022,44(4):426-430.
[2]姜卫平,梁娱涵,余再康,等.卫星定位技术在水利工程变形监测中的应用进展与思考[J].武汉大学学报(信息科学版),2022,47(10):1625-1634.
[3]丁乐乐,潘宇明,王震,等.不同观测时长的GNSS变形监测精度分析[J].工程勘察,2022,50(7):56-60.
[4]王国权,鲍艳.基于区域参考框架的GNSS滑坡监测[J].测绘学报,2022,51(10):2107-2116.
[5]张泽平,张泽玉,王金山.基于BDS/GPS/IBIS-S数据桥梁变形监测分析[J].工程勘察,2022,50(5):68-72.
[6]陈丹.GPS技术在水利工程变形勘测中的应用[J].河南水利与南水北调,2021,50(10):79-80.
[7]陈凯.GPS技术在某大型建筑物变形监测中的应用[J].江西建材,2022(9):99-100,105.
[8]章迪.GNSS对流层天顶延迟模型及映射函数研究[J].测绘学报,2022,51(9):1984.
[9]LIU G L,HUANG G W,XU Y,et.al. Accuracy Evaluation and Analysis of GNSS Tropospheric Delay Inversion from Meteorological Reanalysis Data[J]. Remote Sensing,2022,14(14),3434.
[10]刘健,黄观文,杜源,等.基于基准站信噪比先验信息的GNSS观测数据多路径误差识别方法及应用[J].地球科学与环境学报,2022,44(2):352-362.
[11]NIE S H,WANG Y X,TU J S,et.al. Retrieval of Soil Moisture Content Based on Multisatellite Dual-Frequency Combination Multipath Errors[J]. Remote Sensing,2022,14(13),3193.
[12]祝会忠,雷啸挺,李军,等.BDS参考站三频整周模糊度单历元确定方法[J].测绘学报,2020,49(11):1388-1398.
[13]WU Z M. GNSS integer ambiguity posterior probability calculation with controllable accuracy[J]. Journal of Geodesy,2022,96,53.
收稿日期:2022-01-14
作者简介:连飞宇(1984—),男,本科,工程师,研究方向:无人机航摄及变形监测等。
通信作者:黄立鑫(1994—),男,硕士生,工程师,研究方向:3S技术及应用研究。
猜你喜欢
读与写·教育教学版(2017年1期)2017-02-05
建筑建材装饰(2016年12期)2017-01-19
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
电脑知识与技术(2016年21期)2016-10-18
科学与财富(2016年28期)2016-10-14
考试周刊(2016年76期)2016-10-09
