
V2I系统的测试标准现状分析
2023-06-14 09:39肖星星,周正,张显淳,孙元霞,王庆涛
汽车科技 2023年3期
肖星星,周正,张显淳,孙元霞,王庆涛

摘 要:车路协同技术作为智能交通系統的关键技术,由于其多行业技术融合的背景,导致测试内容复杂、影响元素众多。本文全面分析V2I系统测试标准发展现状,从V2I系统实现出发,将系统按照功能组成划分为:感知、定位、通信、算法应用四个模块,整理各模块应用层现有标准,包括技术要求、测试标准,分析其存在的不足之处,探究标准发展现状及趋势。
关键词:车联网;V2I;测试
中图分类号:U461.9 文献标识码:A 文章编号:1005-2550(2023)03-0016-07
Status Analysis of V2I System Test Standards System
XIAO Xing-xing, ZHOU Zheng, ZHANG Xian-chun, SUN Yuan-xia, WANG Qing-tao
(National Automobile Quality Inspection and Test Center (Xiangyang),
Xiangyang 441004, China )
Abstract: As a key technology of intelligent transportation system, Intelligent Vehicle Infrastructure Cooperative technology leads to complex test content and numerous influencing elements due to its multi-industry technology integration background. Development present situation, this article analyze the V2I system test standard from V2I system, could be divided into: system according to the function of perception, positioning, communications, algorithm four modules, each module application layer existing standards, including the technical requirements, test standard, analyze its existing shortcomings, to explore the present situation and trend of development of the standard.
Key Words: Intelligent Vehicle Infrastructure Cooperative; V2I; Testing
1 引言
近年来,汽车产业朝着“新四化”目标不断发展,而V2X技术是实现智能化、网联化、共享化的重要途径。目前,各地政府、三部委与企业联合建立智能网联先导区、示范区,实现智能网联产业落地,加快了智能网联技术研究发展及积累,因此完善V2X技术要求及测试标准迫在眉睫。
随着智能网联汽车产业的发展,测试评价技术也在持续演进。中国汽车工业学会、中国人民共和国工业与信息化部、中国智能交通协会均发布V2X相关标准。但由于V2X包括的类型及涉及行业众多,各团体对V2X标准研究各有侧重且不够全面。
本文以V2X类型中应用最为广泛的V2I场景类型为例,分析系统组成,将系统按照功能组成划分为:感知、定位、通信、算法四个模块,对各模块技术要求及测试相关国标、团标、行标、地方标准进行梳理,发现V2I测试标准体系不够完善。现阶段V2I系统的相关测试集中在车端通信,而整车测试方法的相关标准仍需完善。路侧定位、通性协议一致性虽有相关要求但具体测试标准仍然缺失,感知相关技术要求尚不全面。
2 V2I系统组成
本文根据团标T∕CSAE 53-2020场景定义,将V2I系统功能组成分为四个模块:感知、定位、通信以及场景算法运用,并对各模块具体功能的实现过程进行分析。
2.1 V2I感知
中国信通院在《2021年车联网白皮书》中提出,场景感知性能指标需进行量化约束[1]。V2I场景的感知是通过在路侧安装各类传感器设备如雷达、低时延相机进行路侧交通情况感知,部分复杂场景需通过MEC进行融合计算,以实现对路侧交通参与者的低时延、高准确的识别。
2.2 V2I定位
V2X对车辆定位精度的要求较高,“新四跨”引入高精定位和高精地图技术,是解决V2X车辆定位问题、服务于自动驾驶的重要技术。V2X高精定位主要是通过GNSS与RTK技术结合实现,在路侧安装定位基准站,在车端安装定位移动站。车辆位于差分基准站覆盖范围即可实现高精定位。
2.3 V2I通信
国内采用的V2X通信技术为C-V2X,其中根据网络的不同分为LTE-V2X和5G NR-V2X两种。现阶段5G NR-V2X现处于研发阶段,主要以LTE-V2X通信为主,其中基于LTE的车联网无线通信架构可分为接入层、网络层、应用层。现阶段车辆测试行业主要关注于应用层方面。
2.4 V2I算法
目前V2X第一阶段场景的预警均是由车端完成,主要是基于车内V2X预警算法实现,场景预警算法的实现包括数据要求定义、场景触发前置条件、场景触发判断条件及场景触发解除条件等。OBU将智能路侧单元RSU传输的数据与车辆自身的行驶数据相结合,然后基于V2X预警算法判断所在V2X场景是否需要进行相应预警。
3 V2I系统测试
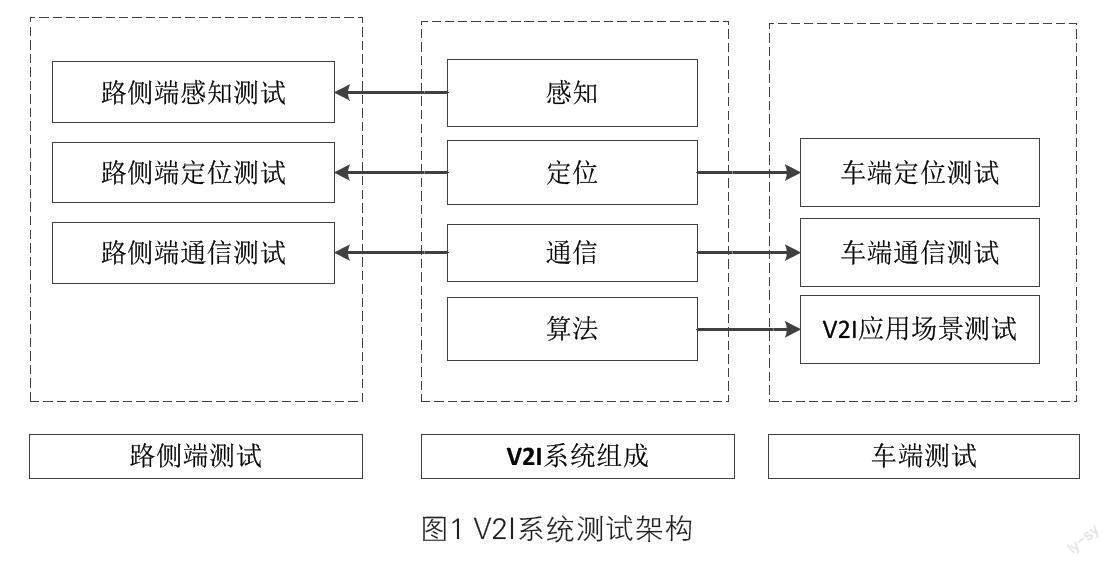
通过对V2I系统组成模块具体实现方式进行分析,可知感知功能由路侧实现、定位及通信功能由车端和路端实现、V2I算法应用功能由车端实现。对V2I系统测试内容进行梳理,得到测试内容包括:感知测试、路侧端定位测试、车端定位测试、路侧端通信测试、车端通信测试、算法应用测试六部分,如图1所示。
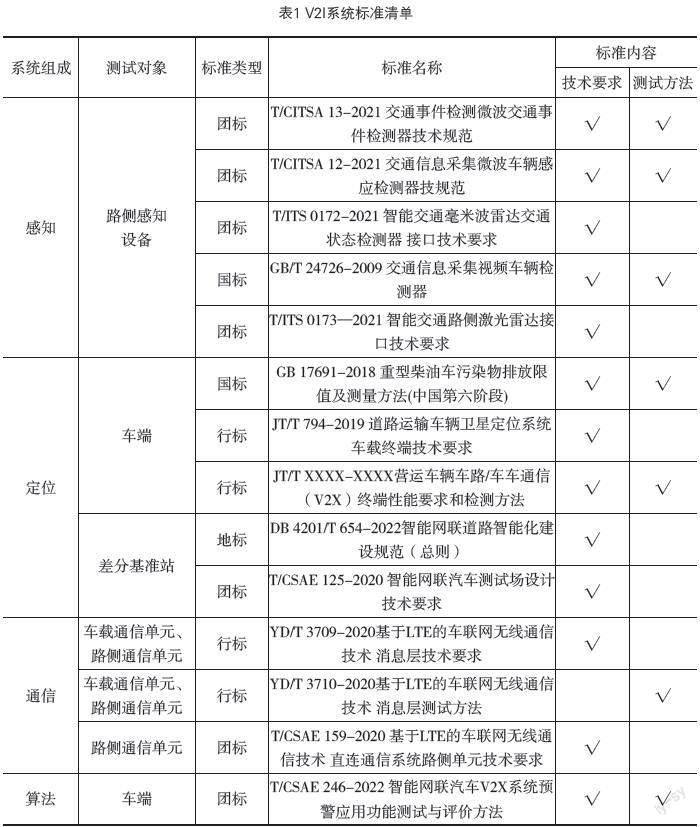
基于上述V2I系统测试架构,对现有标准进行整理,得到V2I系统技术要求及测试标准清单,具体如下表1所示。整理发现,现阶段对于V2I感知、定位、通信、算法的相关标准多为团标、行标,暂无针性国标。其中感知相关标准均针对单一设备,车路协同路侧感知要求相关标准暂无,目前行业对路侧感知范围、时延、精度已开展了相关测试研究;路侧环境的定位要求已在相关团标中进行了规范,但测试标准暂无;车端定位测试各相关方已有较成熟的测试方法,但当前标准是针对重型车排放远程监控系统车载终端,而车路协同的测试标准仍未发表。通信方面技术要求及测试标准已较成熟,在“四跨”、“新四跨”开展了大量RSU、OBU的通信性能相关测试,分析在大规模通信情况下各厂商的RSU与OBU的通信性能,其中各厂家设备均需满足协议一致性标准要求;车路协同应用场景定义及预警测试方法标准均已发表,各RSU、OBU厂家已依据现有应用场景定义制定场景算法逻辑,具体指标也已有相关标准进行规范。综上可知,现阶段相关标准已有一定落地成果,但仍需不断补充及完善,下文将对相关标准进行具体分析。
3.1 感知测试标准
常见的车联网路侧感知设备包括摄像头、毫米波雷达、激光雷达等,针对各感知设备相关技术要求及测试标准已有很多。国标GB/T 24726-2009规范了视频车辆检测器技术要求及测试方法;中国智能交通产业联盟发布的团标T/ITS 0173-2021规范路侧激光雷达接口相关技术要求;中国智能交通协会发布的团标T/CITSA 12-2021、T/CITSA 13-2021规范了微波交通事件检测器和微波车辆感应检测器技术要求及测试方法;中国通信标准化协会针对路侧感知技术,立项了《车路协同路侧感知技术要求及测试方法》行业标准,目前处于研究阶段。如表2所示为其中团标T/CITSA 13-2021对交通信息采集微波车辆感应检测器各性能参数要求[2],通过在测试路端安装被测检测器、关电开关、视频设备构建测试系统,组织一定的交通流来模拟交通事件(如停止事件、逆行事件、拥堵事件、超高速事件、低速事件等),对比实际交通事件参数与被测检测器检测交通事件分析交通事件检测器性能是否满足标准要求。如图2所示,1-10区域为模拟交通事件发生区域。
目前行业开展的V2X路侧感知相关研究,已有一定成果,但标准体系并不完善,现有标准均为单一传感器的感知技术要求及测试标准,对于当前已存在的结合雷达和摄像头功能的融合感知设备的感知效果及相关指标暂未规范。且针对各V2X场景感知性能要求及测试方法,暂无相关标准,由此无法保证路端传输给车端数据的可信度。感知相关标准仍需不断完善。
3.2 定位测试标准
V2I定位测试分为路侧定位和车端定位。其中路侧定位系统是辅助定位装置,其可为在车辆提供高精度定位服务。车端定位主要是通过车载高精度组合导航系統实现单车定位。当前主流的路侧定位装置为差分基准站,来保证其覆盖范围内的定位精度均满足V2X场景要求,目前对于路端定位技术要求已有行业及地方相关标准。车端定位相关技术要求及测试标准已有相关国标及团标。
3.2.1 路侧定位标准
在武汉市标准DB 4201/T 654-2022中指出:智能网联道路需提供全天候持续稳定的高精度定位服务。其中对静态定位、动态实时定位精度进行要求,具体要求为:水平优于10cm,垂直优于20cm[3]。
在团标T/CSAE 125-2020中,对测试场基站定位精度的要求更高,具体如表3所示。
针对不同V2X场地,路侧定位精度要求有所差异,各智能网联场地需根据场地定位精度要求建立合适的高精度定位系统。当前虽已有各场地定位精度的技术要求,但无具体的测试标准,无法测试各场地是否符合相关标准要求。需针对不同定位方法对应的定位要求建立相关测试标准,对差分基准站覆盖范围的定位性能进行测试。
3.2.2 车端定位标准
T∕CSAE 53-2020、T∕CSAE 157-2020对V2X一阶段、二阶段场景定位性能进行规范,以支持各应用场景实现。其中一阶段场景除汽车近场支付外,各场景定位误差均需≤1.5m,第二阶段部分场景定位精度需≤0.5m。在GB 17691-2018中对重型柴油车车载定位功能中水平定位精度、最小位置更新率、冷启动定位时间、热启动定位时间进行要求。可参照其确定定位性能测试内容。
在编行标《营运车辆车路/车车通信(V2X)终端性能要求和检测方法》针对车辆定位性能测试,提出了测试方法及具体评价指标。通过进行静态定位精度测试、动态定位精度测试、首次定位时间测试、重新捕获时间测试、灵敏度测试评价车辆定位性能,各测试内容对应的相关指标如表4所示,但该标准定义的水平、高程定位误差均不足以满足V2X场景要求。
对于V2I车辆定位性能技术要求已经明确,各场景定位性能均在标准中进行规范,目前关于定位相关测试方法已较全面,但暂无与V2X场景定位性能要求相匹配的测试标准,相关测试标准仍需进一步完善。
3.3 通信测试标准
当前,路侧端应用层通信重点关注通信性能及应用层一致性。应用层通信性能需保证V2X通信质量主要关注数据的时延和丢包率;应用层一致性需保证通信双方可实现互联互通且发送数据的正确性。其中通信性能技术要求已在现有团标中进行规范。协议一致性技术要求及测试方法已有相应团标。
3.3.1 通信性能测试标准
在T∕CSAE 53-2020对各场景时延和丢包率进行要求,端到端时延≤100ms,丢包率≤10%[5]。为保证车路交互时的通信性能满足要求,通信性能的测试多采用对整个系统进行测试。V2X通信性能测试相关测试目前处于研究阶段,还未有具体标准。
在编行标《营运车辆车路/车车通信(V2X)终端性能要求和检测方法》针对V2X通信性能要求提出了测试方法:首先配置路侧RSU和车載OBU发送接收模式,并固定发送端的发送功率、周期、包大小,后驾驶待测车辆在制定的测试路线行驶,计算各测试项目的时延及丢包率,但标准对如何获取端到端时延的具体方法未进行说明。
3.3.2 应用层一致性测试标准
应用层一致性包括应用层协议一致性和应用层数据一致性。协议一致性是对路侧RSU、车端OBU发送的消息集的一致性进行测试,在行标YD/T 3709-2020对V2X第一阶段消息层数据进行定义,主要由1个消息帧格式,5个基本的消息体及相应的数据帧数据元素组成,其中可由路侧发送的消息体包括MAP、SPAT、RSM、RSI、BSM,由车辆发送的消息体为BSM。在标准YD/T 3710-2020规范了消息层的测试参数与指标、测试方法、测试用例,如下表所示为RSU、OUB协议一致性测试内容[6],其中对于测试RSU、OBU接收的消息体的测试内容包括:被测系统是否能接收到测试系统发送的数据元素、被测系统接收到消息体是否与测试系统发送的一致;对于测试RSU、OBU发送的消息体的测试内容包括:数据元素是否可被测试系统接收到、消息体编码方式是否为UPER、发送的数据元素值是否与测试系统配置值一致等。该测试标准集中于通信行业,当前相关方对于该标准的测试环境多为实验室环境,各厂家在不断开发基于整车道路测试环境的测试方法及设备,通过整车测试的相关标准也仍需要完善。见表5所示。
应用层数据一致性测试暂无已发布标准,在编标准《基于LTE-V2X直连通信的车载信息交互系统技术要求》将对车端应用层数据一致性(车辆发送的BSM消息体一致性)相关技术要求进行规范,并对BSM消息体数据一致性给出了试验方法及试验参数,但目前标准还未发布,相关技术要求仍在更新完善。
3.4 算法测试标准
T/CSAE 53-2020、T/CSAE 157-2020对于一阶段、二阶段场景进行定义,并规范场景了各场景的适用范围、典型场景。对于V2I应用场景测试,CSAE/T 246-2022给出V2I第一阶段的9个场景对应的测试用例、测试方法,通过性条件。该标准中将测试过程分为:调整阶段和性能评价阶段。如图3所示为前向碰撞预警测试场景图。车辆需在S1将速度调整至目标车速,在S2保持目标车速稳定行驶,在S3完成性能评价测试[7]。该标准给出V2I各场景的测试参数及对应的通过性条件,如表6所示为V2I各场景性能指标,对于碰撞类场景采用最晚预警距离及最早预警距离进行评价,对于道路事件类场景采用车辆到达道路事件影响区域至V2X应用发出预警延时进行评价。上述指标均为对预警开始时机的要求,对预警结束时机并未要求。
该规程虽给出各场景测试用例、测试方法,通过性条件,但其测试场景不全未能覆盖T/CSAE53-2020,缺失绿波车速引导场景测试方法。同时规程缺失场景定义边界的误报、漏报测试,如在道路危险状态提示测试中可增加相邻车道前方有道路危险情况场景,测试车辆在相邻车道是否会发生误报,可设置同车道不同偏移率场景,测试车辆沿车道边缘行驶漏触发情况。同时对于场景结束时机并未进行要求及测试,测试内容不够完善。考虑到V2I场景的多样性,各场景对于参数指标及测试条件存在差异,仍需不断进行完善。
4 总结
本文通过分析V2I系统实现过程、明确V2I系统相关测试内容、结合现有标准及测试方法,发现当前V2I应用层测试整体还处于初级阶段,其中感知方面相关技术要求及测试标准均处于研究阶段;定位方面技术要求有明确规定,但相关测试标准及方法仍不明确;通信方面整体较为全面,集中于通信行业;V2X算法应用方面,各企业V2X算法不同,目前主要集中在功能测试方面,各场景测试标准仍需完善。由此,为使V2X行业快速、健全的发展,首先需完善路侧感知技术要求及测试标准,为体系提供有效数据支撑;然后行业及各企业也需根据路端与车端定位技术要求,加快测试方法及标准的完善;最后还需根据各场景定义及技术要求完善相应的测试方法及标准,对V2X车辆场景应用功能及性能进行测试评价。
参考文献:
[1]中国信息通讯研究院.车联网白皮书[R/OL]. http://www.199it.com/archives/1366556.html, 2021.12/2022.02.20.
[2]T/CITSA 13-2021.交通事件检测微波交通事件检测器技术规范[S].
[3]DB 4201/T 654-2022.智能网联道路智能化建设规范(总则)[S].
[4]T/CSAE 125-2020.智能网联汽车测试场设计技术要求[S].
[5]T∕CSAE 53-2020.合作式智能运输系统车用通信系统应用层及应用数据交互标准(第一阶段)[S].
[6]YD/T 3710-2020.基于LTE的车联网无线通信技术消息层测试方法[S].
[7]T/CSAE 246-2022.智能网联汽车V2X系统预警应用功能测试与评价方法[S].
肖星星
毕业于长安大学,硕士研究生学历,现就职于国家汽车质量检验检测中心(襄阳),主要研究方向:车联网试验技术。
专家推荐语
赵 轩
长安大学汽车学院
教授 副院长
车联网是智能汽车发展过程中的一项重要技术。本文分析了V2I系统测试标准,对比了不同标准中感知系统、定位系统、通信系统的测试内容,对推进国内车联网系统的标准化、规范化具有一定积极意义。
猜你喜欢
幽默大师(2020年12期)2021-01-04
幽默大师(2020年11期)2020-11-26
幽默大师(2020年10期)2020-11-10
摄影之友(影像视觉)(2019年3期)2019-03-30
摄影之友(影像视觉)(2019年2期)2019-03-05
摄影之友(影像视觉)(2018年12期)2019-01-28
中国广播(2016年11期)2016-12-26
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
电脑知识与技术(2016年17期)2016-07-23
商(2016年8期)2016-04-08
