
自适应模糊PID对溶解氧的智能控制
2023-06-21 21:55张陈李明河沈鹏
现代信息科技 2023年1期
张陈 李明河 沈鹏
摘 要:针对污水处理的非线性、滞后性和不确定性,提出将智能控制中的模糊控制和传统的PID控制相结合,使得控制器同时具有模糊控制的强鲁棒性和普通PID的优稳定性。通过MATLAB模拟表明,相较于传统PID控制器而言,模糊PID溶解氧控制系统在污水处理过程中具有响应速度快、震荡较小、稳定性好等优点。
关键词:污水处理;模糊控制;溶解氧;模糊PID
中图分类号:TP39;X70 文献标识码:A 文章编号:2096-4706(2023)01-0107-04
Intelligent Control of Adaptive Fuzzy PID on Dissolved Oxygen
ZHANG Chen, LI Minghe, SHEN Peng
(School of Electrical and Information Engineering, Anhui University of Technology, Maanshan 243002, China)
Abstract: Aiming at the fact that sewage treatment is nonlinear, large lag and uncertainty, it is proposed to combine fuzzy control in intelligent control with traditional PID control, so that the controller has both strong robustness of fuzzy control and excellent stability of ordinary PID. MATLAB simulation shows that compared with the traditional PID controller, during the sewage treatment process, the fuzzy PID dissolved oxygen control system has the advantages of fast response, small shock and good stability.
Keywords: sewage treatment; fuzzy control; dissolved oxygen; fuzzy PID
0 引 言
随着人类社会不断地进步发展,科技不断地创新,人们正快速地进入现代化。现代化的标志大城市集群化以及轻重工业集中化也随着现代化的发展迅猛发展,随之而来的是水资源的质量和人均持水量都在逐步降低[1]。改革开放以来,在近三十年的时间里我国由于重视经济建设,忽视了经济发展和环境保护之间的平衡,导致了严重的环境和水污染[2]。城市和工厂的污水处理逐渐成了公众以及政府关注的焦点[3]。现阶段我国大部分的乡村污水处理设备较少,因而可知,大部分的乡村污水得不到处理,设备和技术相对较为落后[4]。
溶解氧在污水处理中尤为重要,其关系着污水处理效果和能耗以及企业效益。在曝气量较少溶解氧含量较低时,活性污泥的活性会降低,使污水处理的达不到排放标准,出水水质达不到要求;而当曝气量较高时,污泥会发生污泥膨胀,需要经常清污,而且时间过长不经济,影响企业效益。对于溶解氧在污水处理过程中存在的严重滞后、难以确定和非线性等特点,许多学者对其做了大量的针对研究。Wahab等学者为了解决PID控制器在单一变量不能很难好的得到控制效果使用了多变量的PID控制,达到较为精确控制溶解氧的目的[5]。Bagheri等研究了中间变量对出水水质的影响,利用RBF神经网络和多层感知器建立了固体悬浮物、化学需氧量(Chemical Oxygen Demand, COD)、总磷和氨氮的预测模型[6]。Huang等提出基于自适应网络的模 糊推理系统(ANFLS)和主成分分析法对造纸污水处理过程进行建模,该模型考虑到COD的预测值和设定值之间的差异,可以有效地更改添加剂的剂量[7]。王欣等提出使用多输入多输出最小二乘SVM(LSSVM)对污水处理过程进行建模,结果表明在基于LSSVM的基础上所建立的模型具有很好的运行效果[8]。这些控制方法在特定的情况下可以取得较为理想的控制效果,但是由于溶解氧的曝气控制现场的时滞、非线性,其控制实现起来较为复杂,一般很难在主要使用PLC控制的污水处理企业中应用。而应用最广的普通PID控制则解决不了溶解氧的时滞性和不确定性,控制效果较差。针对上述问题,为了解决在溶解氧的控制中的滞后、非线性, 本文提出一种将经典PID控制和具有强鲁棒性的模糊控制相结合的方法,可以使得该控制器在具有上述兩种控制器优点的情况下实现对溶解氧的智能控制,而且系统较为简洁。
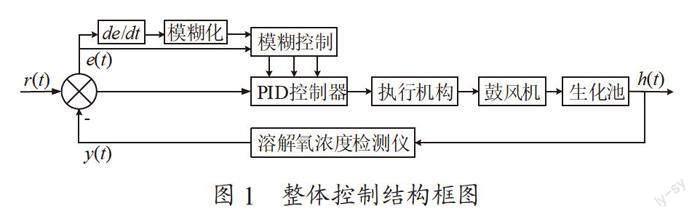
自适应模糊PID控制系统对溶解氧的现场系统的框图如图1所示,其核心是模糊控制器以及PID控制器,其中模糊控制器以在现场实时测得的溶解氧的值与我们预设值的误差e和对误差进行微分处理的ec作为输入,PID控制器参数增量ΔKp、ΔKi、ΔKd为输出,PID控制器的参数与模糊控制器解模糊后的精确值的输出进行迭代,使得以模糊控制器输出为输入的PID控制器随被控对象的实时状态改变而产生我们所期望的相应的变化。
1 PID控制与模糊控制简介
1.1 PID控制原理
PID控制利用反馈来检测偏差信号,并通过偏差来对被控量进行控制。偏差信号通过按一定倍数放大(P)、取积以消除静差(I)、取微以加快响应速度(D)的组合构成控制量进行控制。其内部原理图如图2所示。
PID控制器无法对非线性系统进行很好的控制,由此可见它是一种线性的控制器。PID控制器以预设yd(t)与实际输出值y(t)构成控制偏差:
error(t)=yd(t)-y(t) (1)
PID的控制规律为:
(2)
或者写成传递函数的形式:
(3)
式中,Kp为比例系数;Ti为积分常数;Td为微分常数。
PID控制器中的三个环节的主要作用如下:
比例环节:对被控系统的偏差信error(t)成比例的进行放大,在偏差产生的时候控制器即随即动作,比例系数越大控制器动作越大,对误差进行减少。比例环节可以有效地减少偏差,但对静差不能有效的消除。
积分环节:积分环节可以弥补比例环节所不能清除的静态误差,而且还能够提高该系统的无差度。当系统存在静差时,积分环节会随之作用,直到静差被完全消除。当积分时间常数较小时,积分速度会变得更快,积分效果也随之加强。
微分环节:微分环节可以用来识别误差的变化速度,当误差信号的加速度过大时,系统容易出现误差过大的情况,影响系统稳定性,微分环节可以很好地解决这个问题。积分环节可以很好地弥补比例环节不能消除静差的问题,但相应会使得系统的动作速度变慢,而微分环节则可以有效地解决积分环节存在的这个问题。
1.2 模糊控制PID原理
模糊控制(Fuzzy Control)是一种可以解决控制过程中各种被控量以及对于产品评价不易用确定值表示的问题的有效方法。模糊控制主要是将系统输入的精确值转化为模糊值,再将模糊值用我们制定好的模糊规则表进行模糊推理,最后解模糊得到的一个精确值,我们可以用这个精确值进一步的运算作为PID控制的输入进行控制,这样就实现了PID控制的三个参数随被控量的变化而得到了有效的调整。
该控制器用溶解氧检测仪得到的实时值和设定值之间的误差和误差变化作为输入,在模糊控制规则下对PID的三个参数进行迭代,使得PID控制器可以随着被控量的变化随之达到我们想要的调整,以达到想要的控制效果。该控制器的相应内部结构如图3所示。
离散PID控制算法为:
(4)
2 溶解氧浓度模糊PID控制器的设计
2.1 模糊控制器的设计
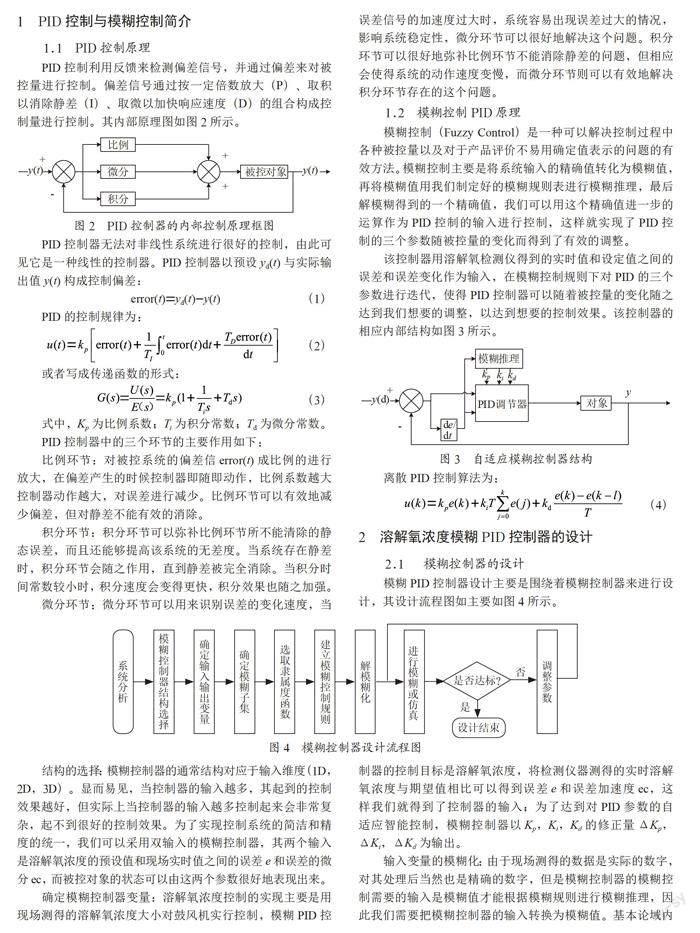
模糊PID控制器设计主要是围绕着模糊控制器来进行设计,其设计流程图如主要如图4所示。
结构的选择:模糊控制器的通常结构对应于输入维度(1D,2D,3D)。显而易见,当控制器的输入越多,其起到的控制效果越好,但实际上当控制器的输入越多控制起来会非常复杂,起不到很好的控制效果。为了实现控制系统的简洁和精度的统一,我们可以采用双输入的模糊控制器,其两个输入是溶解氧浓度的预设值和现场实时值之间的误差e和误差的微分ec,而被控对象的状态可以由这两个参数很好地表现出来。
确定模糊控制器变量:溶解氧浓度控制的实现主要是用现场测得的溶解氧浓度大小对鼓风机实行控制,模糊PID控制器的控制目标是溶解氧浓度,将检测仪器测得的实时溶解氧浓度与期望值相比可以得到误差e和误差加速度ec,这样我们就得到了控制器的输入;为了达到对PID参数的自适应智能控制,模糊控制器以Kp,Ki,Kd的修正量ΔKp,ΔKi,ΔKd为输出。
输入变量的模糊化:由于现场测得的数据是实际的数字,对其处理后当然也是精确的数字,但是模糊控制器的模糊控制需要的输入是模糊值才能根据模糊规则进行模糊推理,因此我们需要把模糊控制器的输入转换为模糊值。基本论域内的量是精确值,模糊论域内的量都是模糊值。因此我们不难得出基本论域是整个系统的输入输出,而模糊论域仅仅是模糊控制器的输入输出。模糊集合是将基本论域转化为模糊控制器的模糊论域所得到的。模糊论域和模糊集合可由一个隶属函数所定义。
在曝气生物滤池的控制现场,我们所测得的误差e一般在(-0.6,0.6)之间,乘以量化因子10后得到其模糊集论域为(-6,6),所以我們得到e和ec的模糊集论域为(-6,6)。输出量乘以比例因子10可以得到其论域也为(-6,6)。
输入变量的模糊论域为(-6,6)。将输入变量e、ec范围划分为7个模糊子集:{NB,NM,NS,ZO,PS,PM,PB},将偏差e和偏差变化率ec量化到(-6,6)的区域内。
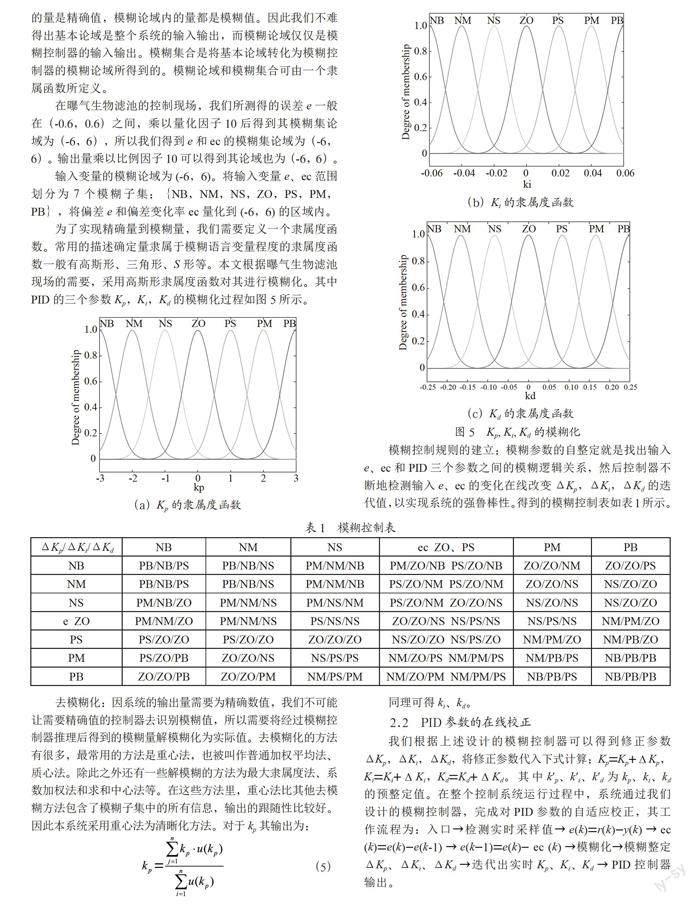
为了实现精确量到模糊量,我们需要定义一个隶属度函数。常用的描述确定量隶属于模糊语言变量程度的隶属度函数一般有高斯形、三角形、S形等。本文根据曝气生物滤池现场的需要,采用高斯形隶属度函数对其进行模糊化。其中PID的三个参数Kp,Ki,Kd的模糊化过程如图5所示。
模糊控制规则的建立:模糊参数的自整定就是找出输入e、ec和PID三个参数之间的模糊逻辑关系,然后控制器不断地检测输入e、ec的变化在线改变ΔKp,ΔKi,ΔKd的迭代值,以实现系统的强鲁棒性。得到的模糊控制表如表1所示。
去模糊化:因系统的输出量需要为精确数值,我们不可能让需要精确值的控制器去识别模糊值,所以需要将经过模糊控制器推理后得到的模糊量解模糊化为实际值。去模糊化的方法有很多,最常用的方法是重心法,也被叫作普通加权平均法、质心法。除此之外还有一些解模糊的方法为最大隶属度法、系数加权法和求和中心法等。在这些方法里,重心法比其他去模糊方法包含了模糊子集中的所有信息,输出的跟随性比较好。因此本系统采用重心法为清晰化方法。对于kp其输出为:
(5)
同理可得ki、kd。
2.2 PID参数的在线校正
我们根据上述设计的模糊控制器可以得到修正参数ΔKp,ΔKi,ΔKd,将修正参数代入下式计算:Kp=Kp+?Kp,Ki=Ki+?Ki,Kd=Kd+?Kd。其中k′p、k′i、k′d为kp、ki、kd的预整定值。在整个控制系统运行过程中,系统通过我们设计的模糊控制器,完成对PID参数的自适应校正,其工作流程为:入口→检测实时采样值→e(k)=r(k)-y(k)→ec (k)=e(k)-e(k-1)→e(k-1)=e(k)- ec (k)→模糊化→模糊整定ΔKp、ΔKi、ΔKd→迭代出实时Kp、Ki、Kd→PID控制器输出。
3 溶解氧浓度模糊PID控制的仿真
3.1 被控对象的建模
在实际测量时,溶解氧的控制模型需要合理地进行适当简化,根据经验其模型的传递函数为:
(6)
其中,kc为放大倍数也就是稳态增益,To为该模型的预计时间常数,τ为对溶解氧模型滞后时间的合理预估。
根据现场经验,我们可以先得到一个估计值,然后通过MATLAB系统工具箱进行该系统的参数辨识。两者结合,可以得到kc为7.812 5,To为72 s,合理的τ为10 s,由此可以得出溶解氧的系统传递函数为:
(7)
3.2 控制仿真
利用MATLAB搭建了模糊自适应PID控制[9],如图6所示。
其中模糊控制器结构如图7所示。
仿真结果如图8所示。
从图8仿真结果可见,采用本文设计的智能PID控制器在进行控制时,系统在t=80 s时就已经稳定在2.5 mg/L,而这正是我们所希望的。但是传统PID控制器在控制时,系统长达200多秒才开始稳定。通过以上对比我们可以得出,相对于普通PID控制,在使用模糊自适应PID控制器时,整个自适应系统可以很好地稳定,而且可以快速追踪,几乎没有震荡,达到既快速又稳定的效果。其中我们可以看到该控制器最为优异的特点就是快速达到了期望值,普通的PID控制实现这样的控制效果是非常困难的[10]。
4 结 论
面对溶解氧控制在废水处理过程中的非线性、大滞后和不确定性,本文对其进行了研究。考虑到对曝气生物滤池系统溶解氧控制存在的上述问题和溶解氧控制的重要性,设计了一个模糊控制与PID控制相结合的智能控制器,实现了结构较为简单和精度相对较高的动态统一。通过模拟出来的结果可以看出,该系统同时具备模糊控制鲁棒性好和PID控制优稳定性的优点,出水水质好,能耗也有一定的降低。智能溶解氧控制系统可以提高污水处理企业的经济效益,在边际条件下可以实现比较稳定的污水出水质量。对于政府所倡导的节能减排和环保保护具有一定的意义。
参考文献:
[1] ANSARI A A,GILL S S. Eutrophication:Causes,consequences and control [M].The Netherlands:Springer,2011.
[2] 乔俊飞,卢超,王磊,等.城市污水处理过程模型研究综述 [J].信息与控制,2018,47(2):129-139.
[3] 贺瑞军.城市污水处理的现状及展望 [J].科技情报开发与经济,2006,16(24):181-182.
[4] 刘韬.污水处理智能控制的发展现状研究 [J].中国高新技术企业,2009(17):121-122.
[5] WAHAB N A,KATEBI R,BALFERUD J. Multivariable PID control design for activated sludge process with nitrification and denitrification [J].Biochemical Engineering Journal,2009,45(3):239-248.
[6] BAGHERI M,MIRBAGHERI S A,EHTESHAMI M,et al. Modeling of a sequencing batch reactor treating municipal wastewater using multi-layer perceptron and radial basis function artificial neural networks [J].Process Safety and Environmental Protection,2015,93:111-123.
[7] HUANG M,MA Y,WAN J,et al. Modeling a paper-making wastewater treatment process by means of an adaptive network-based fuzzy inference system and principal component analysis [J].Industrial & engineering chemistry research,2012,51(17):6166-6174.
[8] 王欣,宋翼頡,秦斌,等.基于LSSVM的污水处理过程建模 [J].湖南工业大学学报,2016,30(1):59-63.
[9] 庞中华.系统辨识与自适应控制MATLAB仿真:修订版 [M].北京:北京航空航天大学出版社,2009.
[10] 付娟.污水处理过程中溶解氧浓度控制策略研究 [D].兰州:兰州理工大学,2017.
作者简介:张陈(1997—),男,汉族,安徽宿州人,硕士研究生在读,研究方向:智能控制。
收稿日期:2022-08-29
猜你喜欢
科学与信息化(2020年11期)2020-06-19
计算机测量与控制(2017年6期)2017-07-01
水利科技与经济(2017年6期)2017-04-28
科技视界(2016年23期)2016-11-04
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
科技视界(2016年5期)2016-02-22
电源技术(2015年11期)2015-08-22
现代电子技术(2015年11期)2015-07-28
