
模糊PID控制在煤矿污水集中监控系统中的应用
2016-11-04 11:07蒋琪
科技视界 2016年23期
蒋琪
【摘 要】本文主要对污水处理监控系统中的控制策略进行了研究。在信息管理层中,根据污水处理控制延时较长、容易出现超调等问题,采用模糊PID控制算法对污水处理流程进行监控,不仅保证了污水处理的质量,而且还降低了污水处理成本,是污水处理的发展方向。
【关键词】污水处理;监控系统;模糊PID
0 概述
随着我国人口的不断增长,以及社会的不断发展,社会水资源需求量越来越大。污水处理及再利用也成为了一个重要的研究方向。与一般包括工业污水的城市污水相比,煤矿污水污染物浓度偏低,污水可生化性好,处理难度小。目前比较流行的污水处理监控主要是由现场设备、PLC控制站、中央控制站的三级监控网络结构。在污水处理监控过程中,用户既可以在PLC控制站直接对各种设备进行控制,同时也可以通过中央控制室中,远程对污水处理流程中的各种设备进行控制。
1 煤矿污水处理综合系统
煤矿污水处理综合系统需要同时实现对矿井污水、生活污水以及医疗污水的处理。但是仅从污水处理的角度来看三种污水的处理可以抽象为一种污水的处理业务。
对于煤矿污水处理综合监控系统的用户而言,其具体的业务就是对煤矿三种污水处理的设备运行状况进行监控,并通过对污水处理现状的描述,来设置系统运行的相关阈值和参数,同时生成必要的污水处理报表进行审核,从而能够随时对污水处理的现状进行了解。
煤矿污水监控系统的重点是设备的控制,按照污水处理工艺理论,污水处理过程中曝气需氧量和溶解氧浓度存在滞后,是一个非线性的关系,但是可以进行分段的线性化。为此,主要采用PID控制技术来进行污水处理过程中的水量、水质的控制,从而提高污水处理的曝气效果和节能效果。
在单闭环PID恒值控制系统中,系统所调节的参数一直保持不变,或者是不超过某一个偏差。PID控制方案思路简单,实现容易,如果检测到污水中污染物浓度高于排放标准时,就以恒定的速度往污水中投放药物,当污染物浓度低于排放标准时,就停止药物的投放。但是,使用PID控制方案控制污水中药物投放时,可能会由于如下两个方面的原因导致药物投放过量:一是,药物反应的延时导致药物投放过量;二是,污水中药物浓度的不均衡性导致药物投放过量。这样就会导致当污水中污染物的实际含量达到排放标准时,继续投放药物,导致药物浪费,增加了煤矿污水处理成本;另外排放后污水中的药物也会对环境造成污染,达不到煤矿污水处理的目的。
2 模糊PID参数自整定污水处理控制系统
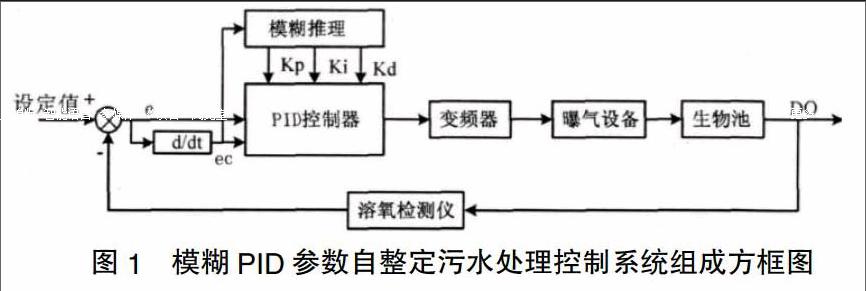
针对污水处理PID控制方案所存在的超调问题,采用模糊PID参数自整定污水处理控制系统来缓解污水处理过程中的超调问题。基于模糊PID参数自整定污水处理控制系统的基本思想是,在进行污水处理过程中,不只考虑当前污水处理浓度是否达到标准,同时考虑当前污水浓度与达到排放标准污水浓度的差值来实现药物的投放量控制。使用模糊PID参数自整定控制来进行PID控制参数的调整,从而进一步提高工作效率。如图1为模糊PID参数自整定污水处理控制系统组成方框图。
模糊PID参数自整定控制方案流程如图1所示:
整个控制流程的重点在于找出PID控制流程中e与ec之间的模糊关系,并通过不断的进行检测,根据模糊控制原理,灵活修改Kp,Ki和Kd三个参数,从而实现系统流程的动态控制。
模糊PID参数自整定控制方案的设计流程为:
1)确定PID模糊控制器的输入/输出变量,从而确定模糊控制器的控制位数。模糊控制器的输入变量为偏差e和偏差变化率ec,其输出为PID控制器参数Kp,Ki,Kd。
2)根据实际的污水处理情况,进行输入/输出变量范围的确定,并且确定这些变量的比例因子、量化因子以及等级。
3)对于每一个变量定义模糊子集,确定模糊子集的个数,并确定模糊子集的语言变量,为各语言变量选择合适的隶属度函数。
4)确定模糊控制规则,即根据煤矿污水处理实际情况,在控制操作人员的工作经验上,进行总结,并得到的模糊条件语句集合。
5)求出模糊控制表,根据所确定的模糊控制规则,确定模糊控制的输出,并将这些输出以表格的形式进行输出。
6)根据模糊控制规则表,选择合适方式将模糊的规则表转换成为具体的PID参数。
7)PID控制方案根据所得到的PID参数进行控制,从而提高PID控制方案的灵活性。
为了实现模糊控制器的标准化,在本文所研究的矿井污水处理中,主要采用玛达尼所提出的模糊控制器标准化设计方法,将[-6,6]之间连续变化的输入误差E,以及误差变化△E离散化,从而构成了一个包含了如下13个整数的离散集合:{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},并且将[-6,6]区间内的连续变量划分为8个模糊状态,即“负大”(NB),“负中”(NM),“负小”(NS),“负零”(NO),“正零”(PO)、“正小”(PS),“正中”(PM),“正大”(PB),并且PLC控制的每一个模糊状态对应了其中的一个模糊集A={A1,A2,A3,A4,A5,A6,A7,A8}。将所示的“正零”和“负零”合并之后,将[-6,6]区间内浮动的误差分成7个模糊状态,分别为“负大”(NB),“负中”(NM),“负小”(NS), “零”(ZO)、“正小”(PS),“正中”(PM),“正大”(PB)。
对于负误差情况,如果误差为 NB 或 NM,而且误差变化也是负的(NB,NM 或NS),那么选择 PB 作为控制量,以便更快消除误差。足够快的加速控制响应;如果误差变化为正,这表明误差趋于减小,应选择较小的控制量,即误差变化为 PS 时,控制量取 PM,而误差变化为 PM 或 PB 时,可不增加控制量,所取控制量为 ZO。当误差较小时,主要问题是使控制系统尽快趋向稳定,并防止发生超调现象。这时的控制量是根据误差变化确定的。例如,若误差为 NS,误差变化为 PB,则取控制量为 NS。根据系统的运行特点,当控制系统的误差和误差变化同时改变正负号时,控制量也必须变号。因此,对于正误差,控制量可被对称地确定。
3 结束语
本文主要对污水集中监控系统的控制策略进行探究,通过借助模糊PID参数自整定污水处理控制系统来提高污水控制处理的精准性。通过采用模糊PID算法能过减少药物投放量,降低污水处理成本,减少排放污水的药物含量,提高污水处理的能力和节能效果。
【参考文献】
[1]王洪臣.煤矿污水处理厂运行控制和维护管理[M].科学出版社,2009(11).
[2]马卫卫,王社平.煤矿污水处理厂自动控制系统特性[J].给水排水,2013.26(1).
[责任编辑:田吉捷]
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
今日农业(2021年20期)2021-11-26
资源节约与环保(2018年1期)2018-02-08
中国新通信(2017年3期)2017-03-11
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年8期)2015-07-09
城市道桥与防洪(2013年6期)2013-03-11
