
基于ROS 系统的无人配送智能车设计
2023-06-21 01:58张雨晴高金凤
智能计算机与应用 2023年6期
张雨晴, 吕 程, 高金凤
(1 浙江理工大学信息科学与工程学院, 杭州 310018; 2 杭州市水务集团有限公司, 杭州 310009)
0 引 言
随着科学技术的进步,机器人技术不断创新,已经在餐饮、物流等领域起着重要作用,代替人类从事危险、重复和繁琐的工作。 无接触配送智能车是一种可以节省劳动力的工具。 然而,当前的无接触配送小车操作繁琐、功能单一、自动化程度不高,尤其是在狭小、拥挤的动态环境中无法胜任配送工作[1]。
提升智能车的集成程度、运动路径精度,规划出更合理、时间更短、平滑性更高和误差更小的移动路径等问题已成为研究的重点[2]。 本文设计了一款基于ROS 操作系统的多功能无人配送智能车,该智能车可通过遥控、语音导航和运动跟随3 种方式控制,以实现物资的配送。
1 硬件结构方案
1.1 总体框架
远程控制设备和无人配送智能车的连接示意图如图1 所示。 该智能车基于ROS 机器人操作系统,包括远程控制设备、配送小车和无线网络系统,其中配送小车和远程遥控设备需处于同一无线局域网中。 该智能车包括储物筐和移动底盘,移动底盘采用3 层平台结构,移动底盘的上层设有深度摄像机、麦克风语音装置、WIFI 模块和激光雷达导航避障装置;中层设有单片机驱动板和上位机;下层设有电源扩展板和麦克纳姆轮。 上位机控制激光雷达导航避障装置和深度摄像机。 通过遥控、语音导航和运动跟随3 种方式,控制智能车进行配送任务。
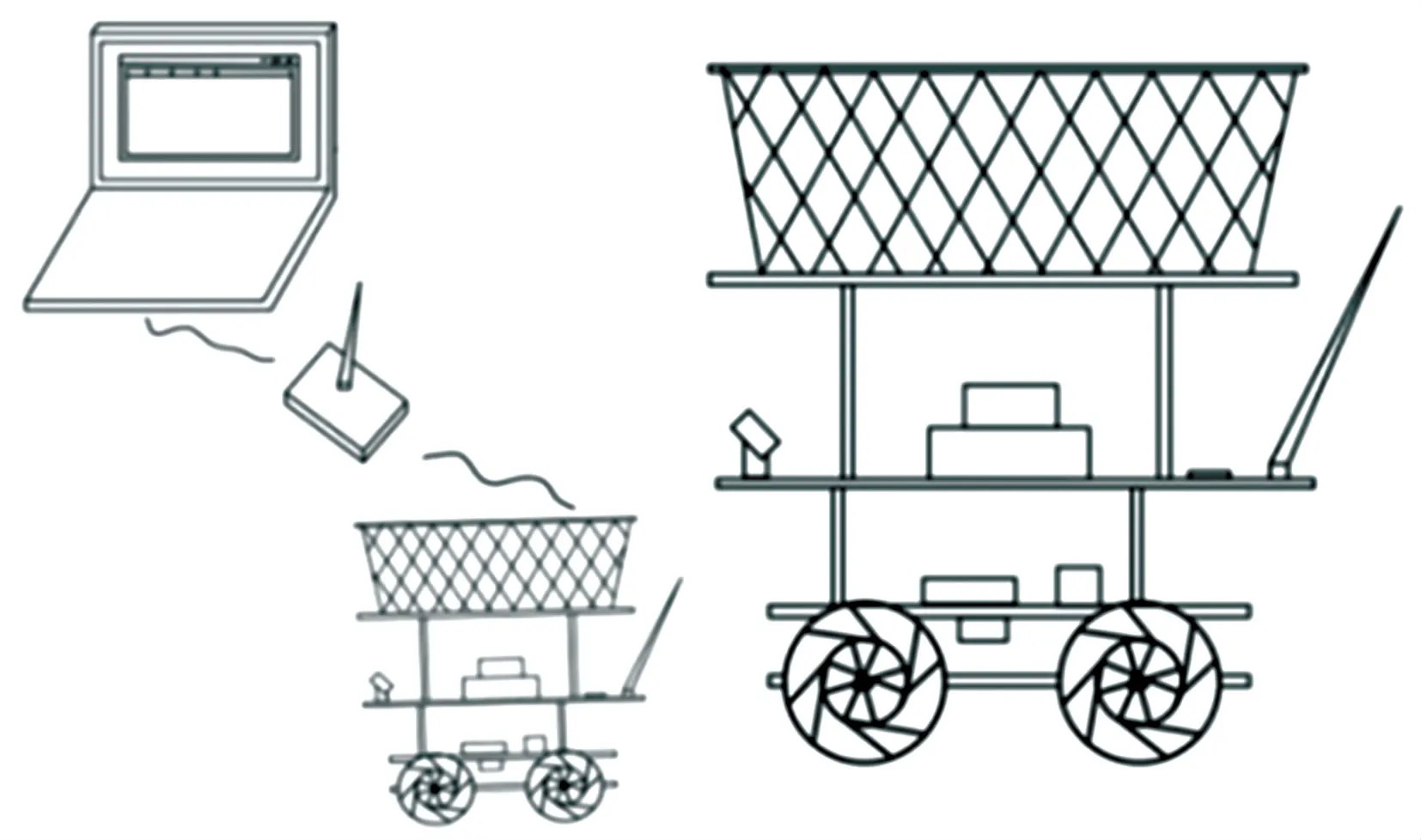
图1 远程控制设备与无人配送智能车连接示意图Fig. 1 Connection diagram of remote control and unmanned intelligent delivery vehicle
智能车平台总体架构图如图2 所示。 该智能车平台的总体架构由软件控制系统层、硬件层和驱动层3 部分组成。 硬件层包括惯性测量单元、深度摄像机、激光雷达、里程计和电机。 思岚A1 激光雷达和乐视深度摄像机将采集到的数据直接发送给上位机,惯性测量单元、里程计和电机由下位机控制。 软件控制系统层包括能够实现建图功能的功能包、导航框架和路径规划功能包。
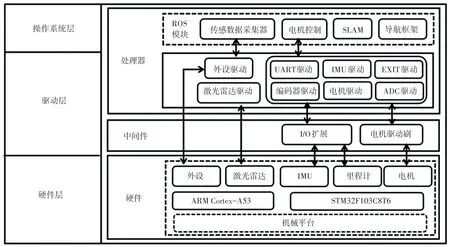
图2 智能车平台总体架构图Fig. 2 Overall architecture of intelligent vehicle platform
1.2 控制组成
该智能车控制系统由ROS 机器人操作系统和STM32 运动控制器组成。 ROS 机器人操作系统控制激光雷达导航避障装置和深度摄像机,并将处理后的信息实时传输给同一局域网上的远程遥控设备。 远程遥控设备接收信息后发送指令给STM32运动控制器,从而控制小车的运动[3]。
ROS 机器人操作系统安装在PC 上作为上位机,其主要模块是定位导航模块。 运动信息通过上位机传送给STM32 下位机,下位机通过订阅话题的方式接收并使用 PID ( Proportion Integration Differentiation)算法调节电机的速度,向上位机传运动数据和传感器信息[4]。
2 软件设计方案
该无人配送智能车使用ROS 机器人操作系统作为平台, 应用 Gmapping SLAM (Simultaneous Localization and Mapping)建图算法将激光雷达采集的环境信息进行建图。 用AMCL(Adaptive Monte Carlo Localization)自适应蒙特卡洛定位算法实现精确定位[5],同时结合A∗全局路径规划算法和DWA(Dynamic Window Approach)局部路径规划算法,以规划出最优路径。 此外,为了提高适用性,该系统还设计了跟随和语音导航功能。
2.1 无人配送智能车的地图构建
构建地图是实现智能车定位导航、路径规划和自主移动工作的前提条件。 采用SLAM 建图理论,智能车在未知环境中移动,利用脉冲式激光传感器获取周围环境信息。 传感器向周围发射脉冲信号,接收回波信号,通过计时电路计算激光往返时间来确定智能车与障碍物的距离,从而构建地图。
该智能车使用开源Gmapping 功能包订阅里程计、惯性测量单元和深度信息,同时完成一些必要的参数设置。
2.2 无人配送智能车的定位导航
定位过程:首先,通过智能车不同位置坐标系之间的变换关系,可以显示运动状态;其次,利用基于扩展卡尔曼滤波算法的robot_pose_ekf 算法,轮式里程计的数据和惯性测量单元的信息融合滤波并输出;最后,通过AMCL 定位框架在已知地图中进行智能车定位,实现持续定位跟踪[6]。
2.3 无人配送智能车的语音交互
该智能车的语音交互系统由语音唤醒、语音采集、命令词识别和语音合成等部分组成。 语音识别采用的是开源的科大讯飞公司的语音功能包,能够将采集到的语音转化为文本,通过命令词识别功能,将语音指令转换为对应的地点名称和坐标,并发布到智能车的控制话题中,以实现准确到达目标位置的目的。
2.4 无人配送智能车的路径规划
对针对静态地图使用A∗算法可以快速有效地规划出全局地图的最佳路径,但无法很好应对动态环境[7]。 DWA 算法则能够使机器人很好地处理小范围的动态环境,避开障碍物,但规划出的路径不一定是最优路径[8]。 因此,本文通过路径规划功能包将A∗全局路径规划算法和DWA 局部路径规划算法结合起来。 在智能车构建生成地图后,首先通过A∗算法规划出全局最优路径规划,让智能车按照该路径行驶。 在行驶过程中,如果动态环境影响到下一个路径并导致节点被占用,就使用DWA 算法规划出动态的局部路径,使智能车绕过障碍物,回到A∗规划的路径。
2.4.1 全局路径规划算法改进
A∗算法结合了具有全局性特点的Dijkstra 算法和最佳优先算法BFS(Best First Search)。 Dijkstra算法被广泛用于智能车路径规划的全局搜索。 虽然BFS 算法可以减小Dijkstra 算法的搜索范围,但是规划出的路径不一定是最优路径。 改进后的A∗算法可以减少传统的A∗算法在路径规划时会产生冗余点和拐点的问题。 A∗算法示意图如图3 所示。
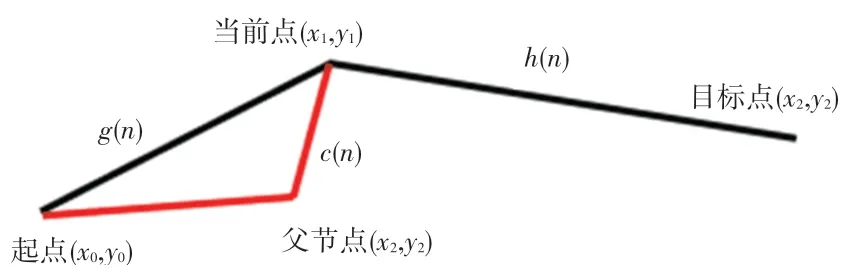
图3 A∗算法示意图Fig. 3 A ∗algorithm diagram
A∗算法的评价函数,式(1):
当前点的评价函数f(n) 由过去成本函数g(n)和当前成本函数h(n) 组成,过去成本函数是起点(x0,y0) 到当前点(x1,y1) 的距离,当前成本函数当前点(x1,y1) 到目标点(x2,y2) 的距离,式(2) 和式(3):
这种算法通过改进评价函数的计算方式,降低了算法的计算量,从而能更加快速有效地生成平滑路径。当h(n) 权重比过大时,虽然能够减少寻路的工作量,但是不能规划出最佳路径;而当h(n) 权重比过小时,虽然可以规划出最佳路径,但是工作量较大,通过引入权重比例系数改变评价函数的权重比,改善路径,以及通过节点优化改进路径生成策略。
2.4.2 局部路径规划算法改进
本文提出了一种改进的动态窗口法,可以有效解决无人配送智能车在局部路径规划时加速度超出规定范围和实际路径偏离全局路径过多之类的问题。 该方法分为两步:首先对智能车自身的速度空间进行动力学约束、运动学约束和障碍物约束;其次,对速度空间的数据采样后,利用动力学公式进行轨迹推算。 轨迹推算示意图如图4 所示。
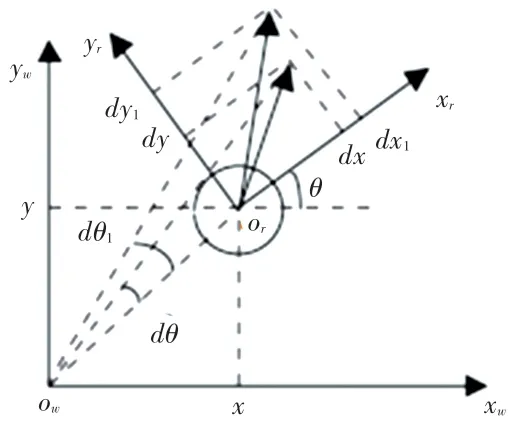
图4 轨迹推算示意图Fig. 4 Schematic diagram of trajectory estimation
在不考虑路况的理想情况下,轨迹推算公式(4)如下:
其中,[xt+dt,yt+dt,θt+dt,]T是t+dt时刻小车在世界坐标系下的位姿,[xt,yt,θt]T是t时刻小车在世界坐标系下的位姿,[dx,dy,dθ]是dt时间内小车在底盘坐标系下的理想变化量。
实际轨迹推算公式中,应该考虑误差对于dt时间内智能车底盘坐标的变化量的影响。
误差补偿后的公式(6):
该算法首先通过DWA 算法对速度进行动力学约束,把智能车加速度控制在不会导致轮胎垂直载荷过小的合理范围内。 其次,该算法对轨迹误差进行闭环的补偿,从而减少了实际路径和全局路径的误差。
3 实 验
3.1 功能测试
本实验在构建的地图上设置了多个目标点和巡航路线,通过QT Creator 开发的遥控软件或语音指令,用户可以轻松地遥控智能车。
3.2 算法验证
经过将改进后的A∗算法与传统的A∗算法进行仿真实验对比,不同A∗算法寻路时间对比见表1,表明改进的A∗算法路径查找时间更短。

表1 不同A∗算法寻路时间对比Tab. 1 Comparison of pathfinding time of different A∗algorithms
经过仿真实验比较传统的局部路径规划算法和改进后的局部路径规划算法,传统DWA 和改进DWA 精确度对比见表2,优化后的DWA 路径规划算法比传统DWA 路径规划算法的误差更小。

表2 传统DWA 和改进DWA 精确度对比Tab. 2 Comparison of accuracy between traditional DWA and improved DWA
4 结束语
本文设计了一种无人配送智能车,该智能车具备良好的语音交互特性、准确建图和精准定位能力,以及运动跟随和精准配送功能。 在改进后的路径规划算法的支持下,该智能车能够更快更精确地到达目的地。 未来的研究可以进一步优化无人配送智能车的性能,以满足不同应用场景的需求。
猜你喜欢
阅读(快乐英语高年级)(2019年5期)2019-09-10
电子制作(2019年14期)2019-08-20
电子制作(2019年9期)2019-05-30
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
小说界(2018年5期)2018-11-26
领导决策信息(2018年50期)2018-02-22
商周刊(2017年5期)2017-08-22
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
