纵垂式波浪能装置的最大输出功率设计
2023-06-22 06:18罗焙琢罗洋洋杨亚洲
现代信息科技 2023年5期
关键词:受力分析
罗焙琢 罗洋洋 杨亚洲


摘 要:波浪能分布广泛,储量丰富,具有可观的应用前景。文章对波浪能转换能量装置的基础结构进行研究,并就其作用机理分析了装置在波浪能下的最大输出功率现状。同时,对海平面产生波浪时,装置在受力情况下的垂荡运动模型与纵摇运动模型进行研究,利用牛顿第二微分定律与微分转动惯量定律寻找两种运动模型的关联性与限制条件;在此基础上,对功率进行积分得出装置在两种不同运动状态下的输出功率,最后再将两个功率相加构建出最终功率输出模型,并找到装置产生最大功率时对应的各部件参数结果。
关键词:受力分析;牛顿第二微分定律;微分转动惯量定律;功率积分
中图分类号:TM619;TP39 文献标识码:A 文章编号:2096-4706(2023)05-0054-06
Design of Maximum Output Power of Vertical Wave Energy Device
LUO Beizhuo, LUO Yangyang, YANG Yazhou
(Sichuan University Jinjiang College, Meishan 620860, China)
Abstract: Wave energy, with its wide distribution and abundant reserves, has considerable application prospects. This paper studies the basic structure of the wave energy conversion device, and analyzes the current situation of the maximum output power of the device under the wave energy according to its mechanism. At the same time, the heave motion model and pitch motion model of the device under the force condition when waves are generated at the sea level are studied, and the correlation and restriction conditions of the two motion models are found by using Newton's second law of motion and Law of differential moment of inertia; On this basis, the output power of the device under two different motion states is obtained by integrating the power. Finally, the final power output model is built by adding the two powers, and the corresponding component parameter results when the device generates the maximum power are found.
Keywords: force analysis; Newton's second law of motion; Law of differential moment of inertia; power integration
0 引 言
随着经济和社会的发展,人类面临能源需求和环境污染的双重挑战,发展可再生能源产业已成为世界各国的共识。占地球总面积71%的海洋首先进入开发者的视线,目前被主要关注的海洋能包括潮汐能潮流能、波浪能、温差能和盐差能等,而波浪能分布广泛,储量丰富,具有可观的应用前景。波浪能装置的能量转换效率是波浪能规模化利用的关键问题之一。
波浪能是指海洋表面波浪所具有的动能和势能,按波浪能的利用方式,波浪能发电可大致分为利用波浪能的垂直运动、利用波浪能的水平运动、利用波浪的水压、利用波浪水质点的运动等形式。按基本原理又可分为利用物体在波浪作用下产生的振荡和摇摆运动、利用波浪压力的变化、波浪沿岸爬升时产生的水势能三种方式,而这三种方式也就是我们通常所指的气动式、液动式和蓄水式。本文将利用波浪能對装置产生的垂荡和纵摇运动方式时的功率输出进行分析。
1 垂荡运动模型的构建
1.1 平衡模型
本文研究的装置如图1所示。
因为浮子与振子的重量占总装置质量过大,所以可以忽略中轴,底座及PTO的质量,以此方便我们进行研究,此外由于研究的装置内各个系统之间采用了摩擦系数很低的配件,所以整个系统产生的较小摩擦力也能忽略不计。仿真模型各零件参数设置如表1所示。
然后我们根据实际研究得出相关的运动参数如表2所示。
我们设置初始状态下,整个装置在重力和浮力两个力的作用下处于平衡状态,可求出装置露出水面的高度:
V=1/3πR2(h-h1)+πR2(H-H1) (1)
R为圆柱半径,h为圆锥高度,h1为圆锥高出水面的高度,H1为圆柱露出水面的高度,可以算出平衡状态下浮子露在空气上的高度H1。
1.2 垂荡运动受力分析
1.2.1 浮子运动
因为初始状态下浮子受外力作用,使之做垂荡运动(由于浮子一开始就从平衡状态下开始运动,因此在分析合力时可以不再考虑浮子的重力和浮力)我们在浮子初始位置处建立三维直角坐标系,规定沿Z轴方向为正方向,如图2所示。
根据研究,浮子在运动过程中受力有如下情况:
(1)波浪激励力fd=fcosωt。浮子在受该力的作用下其方向将根据时间的变化而变化。
(2)静水恢复力F。因为浮子自身运动使其浸水部分的体积发生变化而产生的。根据其实际运动情况,可以求出浮子在运动产生的位置变化时受到的静水恢复力。该力方向始终为浮子的初始状态时刻重力与浮力的平衡点处,此时先分析F为正的情况:
下沉时浮子的柱体在水中的体积增大,此时静水恢复力大小为浮子的浸水体积增加部分的同体积水的重量ρgv排水,方向向上为正方向。
F=ρgπR(H-H1) (2)
上浮时需要分解成为两种情况:第一种情况是浮子浸水体积减小,最大上浮高度可以使水面刚好没过柱体的下底部分,此时柱体将完全露出水面,静水恢复力大小(方向向下):
当上浮时浮子浸水体积减小并达到浮子柱体静止最大过程。
浮子柱体完全出水后,即为锥体露出水面的过程。由此推出:
F=ρgπR2(H-H1)-ρg{1/3πR2h-[1/3πR2(h-h1)+πR2(H-H1)]}(3)
(3)兴波阻尼力fw。即浮子做垂荡运动时,波浪产生造成对浮子运动的阻力。兴波阻尼力与垂荡运动的速度成正比,并且方向相反。分析可知:
(4)
其中B为阻尼系数, 为浮子相对速度。
(4)振子反作用力fa。但是要从内部振子分析fv,先得到振子的运动方程。
1.2.2 振子运动
为了受力分析以及计算数据量的方便,设振子的相对运动位移量为。以振子底座为XOY的平面,中轴Z轴构建三维坐标面,如图3所示。
振子将受到弹力和直线阻尼器(发电装置)的合力作用,并结合微分牛顿第二定律,振子的反作用力:
(5)
其中 为振子加速度,K为直线阻尼器系数,R为弹簧刚度。
根据式(5),振子运动时受力情况如图4所示。
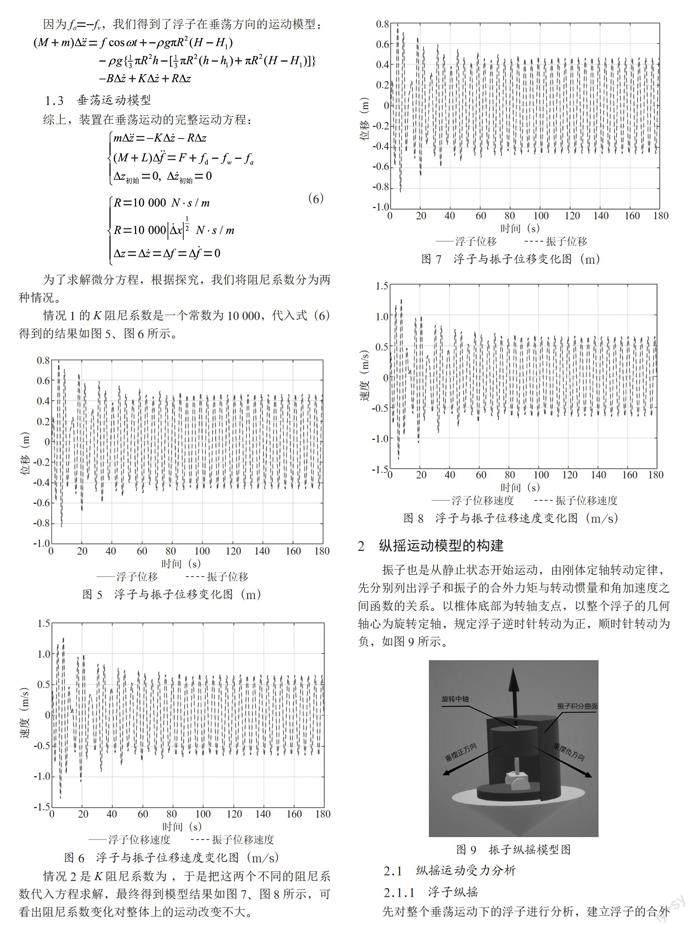
因为fa=-fv,我们得到了浮子在垂荡方向的运动模型:
1.3 垂荡运动模型
综上,装置在垂荡运动的完整运动方程:
(6)
为了求解微分方程,根据探究,我们将阻尼系数分为两种情况。
情况1的K阻尼系数是一个常数为10 000,代入式(6)得到的结果如图5、图6所示。
情况2是K阻尼系数为 ,于是把这两个不同的阻尼系数代入方程求解,最终得到模型结果如图7、图8所示,可看出阻尼系数变化对整体上的运动改变不大。
2 纵摇运动模型的构建
振子也是从静止状态开始运动,由刚体定轴转动定律,先分别列出浮子和振子的合外力矩与转动惯量和角加速度之间函数的关系。以椎体底部为转轴支点,以整个浮子的几何轴心为旋转定轴,规定浮子逆时针转动为正,顺时针转动为负,如图9所示。
2.1 纵摇运动受力分析
2.1.1 浮子纵摇
先对整个垂荡运动下的浮子进行分析,建立浮子的合外力矩和转动惯量与角加速度的乘积的等式,浮子的转动惯量表示为:
(7)
其中Σ1、Σ2、Σ3为浮子锥体表面积、柱体侧面积、柱体上圆面积,ds为面积微元,ρf为面密度。
得到浮子的转动惯量后,我们再去分析浮子在纵摇过程中受到的多种力矩。力矩分类如下:
(1)波浪激励力矩Td。为周期性波浪震荡产生的力矩设其表达式为Td=cosωt。
(2)静水恢复力矩TF。其大小与浮体相对于静水面的转角成正比,比例系数称为纵摇静水恢复力矩系数,该力矩的表示公式为:
TF=-Cθ
其中C为纵摇静水恢复力系数,θ为浮体相较于静水面的转角。
(3)兴波阻尼力矩TX。兴波阻尼力矩与摇荡运动的角速度成正比,方向相反,比例系数称为纵摇兴波阻尼系数,力矩的表达式为:
TX=-Gθ
其中G為纵摇行波阻尼系数。
(4)浮子的重力力矩Tg,根据受力分析可以看出在求解重力力矩前需要先把浮子的重心位置找到,重心位置Zg:
(8)
我们可以将重力矩的大小表达出来:
(9)
扭转弹簧和扭转阻尼器所构成的PTO系统产生的力矩TPTO。
(5)振子重力矩对浮子产生的“反作用”力矩To1,这里不能单一地把振子的重力矩取反,而是还要考虑到浮子相较于振子,振子的重心发生了变换,增加一个圆锥h的长度:
(10)
(6)浮子还存在振子的弹簧、直线阻尼器和静水恢复力矩的反作用力矩Tx,如图10所示。
2.1.2 振子纵摇
(1)由扭转弹簧和旋转阻尼器所构成的PTO系统发生纵摇,并且该系统将会产生一个扭矩,可以看作是整个振子系统产生的转动惯量:
(13)
其中Ωv为振子的垂荡区域,ds为振子表面积的微元,ρv为振子的密度;?Z1为关于t的一个函数,且目标积分体积Ωv随着t发生着改变。所以得到的振子转动惯量Iv是关于t的一个函数。
振子的转动惯量得到后,可求振子的转动力矩TPTO:
(14)
N1为旋转弹簧的刚度,K1为旋转阻尼器的系数。
(2)振子也会产生一个重力力矩To,同理,在求解振子本身的重力力矩时,利用弹簧的伸长变换量找出振子的重心位置,振子的质量是均匀分布的,即重心的位置如图11所示。
因振子本身质量很大,弹簧本身被其压缩,故压缩高度为Z0=mvg/N,此外振子本身有一个实际的位移?Z1,所以就得到了弹簧的伸缩量变化hs-Z0+?Z1,于是重心的位置: hs-Z0+?Z1+(1/2)h0,所以振子的重力矩公式:
(15)
2.2 纵摇运动模型
通过求出的力矩和转动惯量再利用转动定律可得振子纵摇运动模型:
(16)
同理得出浮子的纵摇运动模型:
(17)
3 装置实际运动模型建立
根据垂荡与纵摇运动模型的结合,可以知道运动装置完整的运动状态,并得出浮子与振子的微分方程组:
(18)
(19)
已经得到了振子和浮子的运动方程情况下,先将二阶微分方程组降阶处理,我们取步长为stp=0.002来离散,代入4阶的Rung-Kutta特解方程组将浮子与振子的垂荡位移与速度和纵摇角位移与角速度求解出来,得出浮子与振子的运动模型,如图12至图15所示。
取第10 s,20 s,40 s,60 s,100 s的数据如表3所示。
4 确定直线阻尼器的最优阻尼系数的数学模型
基于浮子做垂荡运动基础上,直线阻尼器在振子中做类似切割磁感线的作用(楞次定律),形成了机械能转化成电能的过程。功率最大情况的计算,圆频率即为波浪的频率ω(角频率)。此外还需要考虑纵摇运动产生的功率,两种功率相加即为装置最终输出功率,并由此确定直线阻尼器的最大系数。由于存在转动角微分的情况,故采用功微元法,利用积分来计算P=FV纵摇的输出功率。
4.1 直线阻尼器做功
由角速度公式:T=ω/2π,计算n个完整周期内直线阻尼器做功的情况。由于存在运动位移微分的情况,故采用功微元法,利用积分去求解做功 ,因为?s是关于t的一个函数,所以d=d/d(t)×d(t),又因为 ,所以求得垂荡时阻尼器平均做功功率为:
(20)
4.2 旋转阻尼器做功
还是利用P=FV计算纵摇产生的输出功率,F=TRDD, ,纵摇运动输出的平均功率的积分方程则为:,代入 后,得出:
(21)
由已求解出的阻尼器垂荡运动输出的平均功率表达式:
可得阻尼器输出的总功率:
(22)
4.3 最大功率与最佳系数
(1)将K1所在的区间[0, 100 000]和N1所在的区间[0, 100 000]分别进行步长为stp=100进行网格化操作,每个离散的Ki,N1i为Ki=(i-1)stp,(i=1, 2, 3,…,1 000),N1i=(i-1)stp,(i=1, 2, 3,…,1 000)。
(2)针对每一个Ki,Ni我们用Runge-Kutta法求出它所对应的振子和浮子的垂荡速度。
(3)将得出的振子和浮子的垂荡和纵摇速度代入 中利用黎曼和方法算出输出功率数值积分。
(4)挑出最大输出功率所对应的最大阻尼系数。
前面的步骤我们用步长为stp=100从1 000个数据中粗滤,找到了最大输出功率,现在我们将对区间[Ki-100, Ki+100]和[N1i-100, N1i+100]进行步长stp=1对上述(1)~(4)步骤进行精细搜索,得出最大輸出功率。
我们得出了阻尼系数K的最优解为3.763 5×104,旋转阻尼系数N1最优解为2.458 5×105,且输出功率最大为2.759 8×10124。
5 结 论
装置利用波浪能做的垂荡和纵摇运动进行详细分析,在此基础上,装置内部产生的最大发电功率和相应部件参数的求解,同时提供一定的波浪能发电装置的设计指标。主要结论有如下:
(1)装置的外形设计是圆锥形和圆柱形的结合形成浮子,内部设计是中轴底座固定于隔层的中心位置,中轴架通过转轴铰接于中轴底座中心,中轴绕转轴转动,PTO系统(弹簧和直线阻尼器)连接振子和转轴架,并处于中轴与转轴所在的平面。除了直线阻尼器,在转轴上还安装了旋转阻尼器和扭转弹簧,直线阻尼器和旋转阻尼器共同做功输出能量。
(2)装置的最大输出功率为2.759 8×10124以及产生最大功率时的直线阻尼系数为3.763 5×104和旋转阻尼系数为2.458 5×105。
参考文献:
[1] 马哲.振荡浮子式波浪发电装置的水动力学特性研究 [D].青岛:中国海洋大学,2013.
[2] 王凌枫.垂荡浮子式波能转换装置水动力性能研究 [D].大连:大连理工大学,2016.
[3] 姜楠,刘聪,张萧,等.波浪能俘获装置的设计和研究 [J].太阳能学报,2022,43(8):447-451.
[4] 陈佳,兰飞,郭昊霖等.波浪能发电控制技术研究综述 [J/OL].电力自动化设备:1-20[2022-09-10].https://doi.org/10.16081/j.epae.202208025.
[5] 谢惠媚,孟凡泰,徐潜龙,等.不同形状的多自由度内置PTO式波浪能转换装置的性能分析 [J].可再生能源,2022,40(7):986-994.
作者简介:罗焙琢(2001—),男,汉族,四川眉山人,本科在读,研究方向;大数据分析;罗洋洋(2001—),男,汉族,四川射洪人,本科在读,研究方向;机器学习;杨亚洲(2005—),男,汉族,四川成都人,本科在读,研究方向:近海海洋动力环境观测与模拟。
收稿日期:2022-10-11
猜你喜欢
东方教育(2016年9期)2017-01-17
科教导刊·电子版(2016年27期)2016-11-18
科技视界(2016年20期)2016-09-29
考试周刊(2016年72期)2016-09-20
求知导刊(2016年19期)2016-08-15
科技视界(2016年17期)2016-07-15
中国高新技术企业(2015年10期)2015-03-19