
室内环境下基于UWB定位系统的智能标签应用研究
2023-07-10 14:33潘佳宁曹会国
计算机应用文摘 2023年11期
潘佳宁 曹会国

关键词:UWB;室内定位;无线电通信;云平台位置服务;社会服务
中图法分类号:TN925 文献标识码:A
1引言
近年来,随着导航定位应用和无线电通信技术的快速发展,基于位置精准度的服务逐渐成为大众用户的迫切需求和众多专家以及企业的研究热点。特别是在情景感知、医疗器械、科学研发、商业服务、休闲娱乐等领域,基于位置精准度的服务应用更加广泛。全球卫星导航系统(Global Navigation Satellite System,GNSS)是室外环境下最常用的导航定位技术,可以实现米级定位,但是人们有近70%~90%的时间是在室内区域活动,GNSS卫星信号由于受到地面建筑物墙体阻碍,难以获得精准的定位数据,逐渐出现了许多室内定位技术。其中,超宽带(Ultra Wide Band,UWB)技术属于基于无线电的室内定位技术,作为一项新型无线交汇定位技术,具有抗干扰能力强、功耗低、抗多径效果好、安全性高、测距精度高等优点,可以通过测量载波信号在定位标签与定位基站之间的传输时间、角度、信号强度等方式实现厘米级室内定位精度,填补了高精度定位范畴的空白。
2室内UWB定位总体系统设计
智能标签定位系统主要包括UWB定位模块和信息交互模块,供电模块采用锂离子电池,支持4pin的磁吸充电,外部由ABS工程塑料构成的框架组成。定位模块包括官方DWM1000定位模块和辅助声光定位模块,在查找功能进行时,加以声、光信号的协同定位,实现“点”的精准定位;信息交互模块实现上、下位机的交互:上位机定位模式分为A类二维定位方式和B类三维定位方式。
根据定位标签坐标和基站坐标所得方程组,结合最小二乘法理论,得出本系统所用的2套方案,二维平面定位至少需要3个固定基站,三维定位至少需要4个固定基站,故基站分布情况也对定位精度有重要影响。分别利用最小二乘法仿真定位算法可得,基站分散分布时的定位效果明显好于基站位于同一水平线分布时的效果,如图1、图2所示。
3系统硬件设计
3.1智能标签定位系统的设计
此定位标签旨在应用于人流密集或物品集中摆放的场景中,而此场景中每个物品所占用空间有限,因此,定位装置的体积必须小巧,不抢占存放空间。故智能标签体积为8 cm(长)×2 cm(宽)×0.8 cm(厚),轻便小巧,可以方便地固定于物品存放的具体位置(如试剂柜内部上方或者冰箱内部)。
3.2硬件通信设计
在设计和实施整个项目时,标签节点的位置不仅与距离信息有关,还与每个基站的固定坐标有关。由于基站的位置不是固定的,可以根据实际场景将其布置在任何位置,因此,基站1节点无法预先知道其他基站节点的坐标信息,也无法根据接收到的距离信息计算标签位置。针对此问题,本系统硬件要求将基站0通过串口接主控STM32F103C8T6,主控板接蓝牙模块。基站的1节点通过串行接口连接到PC。UWB模块可以通过DWM1000测得各个基站与标签的距离,并将距离信息汇总传输给基站0,基站0将最终的距离信息传送至移动云端。其中,蓝牙信息交互模块是基站与移动云端进行无线数据传输的重要模块。
4软件设计
4.1系统软件设计
在云端,基站将接收到的距离信息进行处理,推算出距离,云端可上传模型信息,位置和行列信息都可以在模型中显示,在搜索框中输入要找的物品或对应的标签ID,标签也将做出相应回答。移动终端的数据是由蓝牙传输的,数据处理是由主控板完成的,蓝牙将位置信息和行列信息显示在移动终端。
构成智能标签系统的云平台的显示端使用微信小程序,这是用户链接服务的新方式。其无需下载和安装应用程序,就可以获得所需的服务,并拥有出色的用户体验。二维码技术可以满足用户日益增长的信息需求。标签持有者只需将二维码绑定到要定位的人(物品)并输入其信息或特征,即可通过标签实时检索位置信息,同时实现查找功能。目前,LBS云平台(基于位置的服务)和其他平台被广泛用于信息定位,并取得了一些良好的研究成果。
4.2定位算法
UWB定位不需要使用傳统定位方式中传输信息的载波,如超声波、激光等,而是利用电子标签设备发送具有纳秒或纳秒级以下的非正弦窄脉冲来传输数据,定位基站接收,再通过计算时间差来定位。
UWB本身的算法改进也被广泛应用于导航定位,由于定位计算过程中有一定的误差,通常推荐标签活动范围尽量在某一平面范围内,且室内环境复杂,在UWB定位过程中存在大量干扰及NLOS情况。针对测量精度和人类移动自适应定位问题,本项目采用UWB和PDR室内定位算法融合定位。
首先采用4个或以上基站的测距结果构建虚拟场景定位,分别给标签和基站烧录初始定位程序,将BPhero-UWB模块通过StlinkV2与PC相连,放置好基站,本文引入卡尔曼滤波器协助判断NLOS场景。当滤波进程中没有监测到进入NLOS场景,卡尔曼滤波会正常迭代;若进入NLOS场景,则构建定位解算方程组,选取在非视距情况下定位误差敏感的CHAN方法进行解算,PDR定位不受NLOS影响,因此可以使用PDR定位来支持NLOS场景的UWB定位。该融合定位算法有效地降低了NLOS情况下UWB的定位误差,将平均定位误差降低到0.137.比单一UWB定位精度高约68%,对建筑工地、仓库等大型室内区域的长期高精度定位具有一定的参考价值。
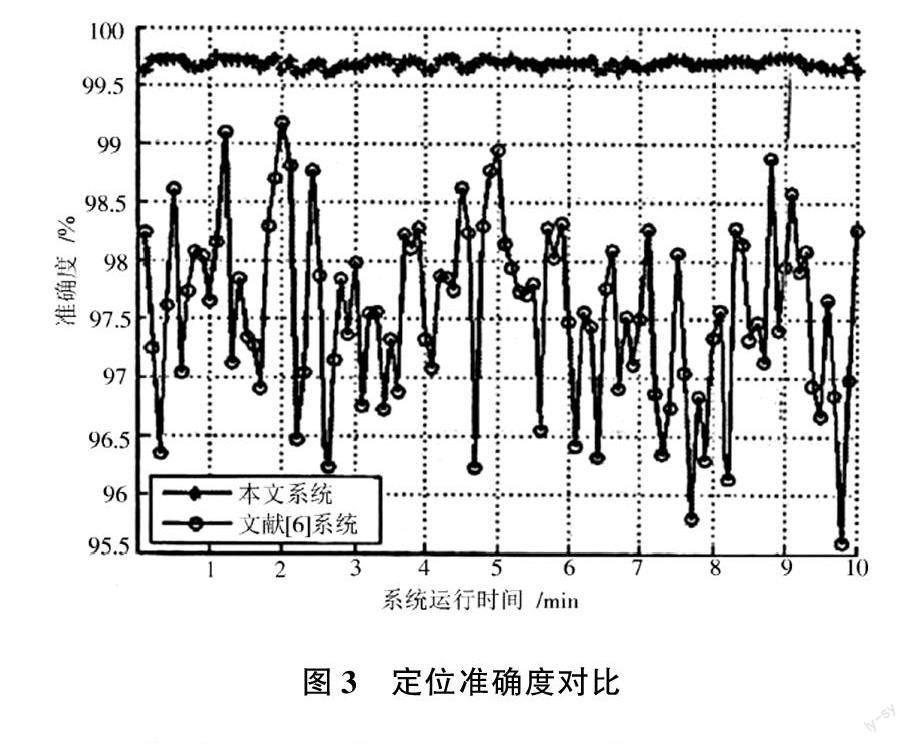
通过将本文系统的定位精度与文献系统在微信小程序二维码范围内的定位精度进行比较,验证了该方法的定位精度。为了使实验更准确,将系统正常运行时间设置为10 min。在相同条件下,将本文系统的定位精度与文献中的系统进行比较。实验结果如图3所示。
4.3室内定位系统上位机设计
信息交互是在云端和系统板上进行的,三维定位的信息交互系统是应用QT软件,以及MATALB语言进行编写的小程序,通过软件蓝牙调试器直接进行通信;二维定位则是在云端进行标签的查询时,在云端、手机端输入标签的名称或者标签的ID,对应标签的LED灯会闪烁,蜂鸣器响。基站0将最终基站信息传输到计算机云端,在云端进行数据的处理,并将具体的位置信息显示在云端对应的3D模型中,以便客户更为直观的了解。在云端,用户也可以进行标签位置以及运动轨迹的实时查询,用户可以将应用场景进行模型化,在云端建立应用场景的3D模型,云端根据应用场景的模型数据,对位置信息进行相应的调整,以追求更为精准的位置信息,满足用户需求。
小程序界面由以下部分组成:(1)定位界面;(2)地图设置,可设置缩放比例原点坐标等内容;(3)串口设置;(4)设备连接界面,小程序根据需定位物信息生成专属二维码,扫描即可绑定关系;(5)设备参数设置,点击配置载人即可将界面上的配置写入设备中;(6)用户查找界面,输入点击开始定位和停止定位按钮可控制定位的进行与取消;(7)标签设置,初设置和修改标签的绑定信息与标定标签的位置。
5结束语
本文提出的基于UWB的智能标签系统解决了室内精准定位与精准找物所需要大量耗时和效率低下问题,下位机通过无线通信将数据传送到Web服务器及各个基站,便于终端访问数据,利用云平台将数据反馈到终端显示器和移动设备上,实现了高精度的定位系统。实验结果表明,该系统定位寻物所需时间约为传统定位系统的二分之一,定位精度始终在98.5%以上,具有显著的优势。
作者简介:
潘佳宁(2001—),研究方向:通信工程。
曹会国(1970—),副教授,研究方向:电子检测与控制技术。
猜你喜欢
软件(2016年4期)2017-01-20
商情(2016年42期)2016-12-23
价值工程(2016年32期)2016-12-20
新教育时代·教师版(2016年31期)2016-12-07
艺术科技(2016年9期)2016-11-18
电脑知识与技术(2016年25期)2016-11-16
课程教育研究·学法教法研究(2016年21期)2016-10-20
电脑知识与技术(2016年21期)2016-10-18
