基于LDV的超高速循环水槽流场流速测量
2023-07-14 06:02耿浩涵王宗龙朱健申朱华伦
船舶与海洋工程 2023年3期
耿浩涵,王宗龙,2,朱健申,邹 旭,朱华伦
(1.中国船舶及海洋工程设计研究院,上海 200011;2.喷水推进技术重点实验室,上海 200011)
0 引 言
循环水槽是开展船舶水动力学试验所需的重要设备。在循环水槽中,待测船体被固定在试验段,通过水泵推动水流在循环水槽中循环流动,由此形成船体与水流间的相对运动,从而测定船舶的水动力性能[1]。由于水流能通过水泵的推动在循环水槽中循环流动,因此可打破试验时间的限制。通过试验段上的透明观察窗,结合流场测量设备,可方便地对水动力性能进行测定。可在水槽中布置流量计、流速计和水听器等多种测量仪器实现对水动力性能的多目标、自动化综合测量。由于循环水槽具有诸多不可替代的优点,国内外相关高校和科研机构纷纷建立了各自的循环水槽[2],国内外相关学者针对循环水槽及相关试验开展了丰富的研究[3]。在国内的研究中:汤忠谷等[4]对1/10 卧式模型水槽试验段的水流情况进行了详细的观察和测试,在距离试验段前端1/3 处的断截面中心线位置测得了垂直方向的速度分布;ZHU等[5]采用数值方法和试验验证方法对循环水槽的水动力性能进行了深入研究,为水槽后续优化奠定了基础;夏君培等[6]在立式循环水槽试验段分别对有抑波板和无抑波板下3 种流速的分布情况进行了测试,证明了有抑波板时的速度分布比无抑波板时的速度分布均匀;于昌利[7]采用计算流体动力学(Computational Fluid Dynamics,CFD)方法研究了导流片和弯管对水槽流场均匀性的影响;陈建平等[8]对CWC(Circulating Water Channel)高速自由液面循环水槽试验段流场品质进行了测量评估。在国外的研究中:VARGHESE 等[9]利用PIV(Particle Image Velocimetry)评估了循环水道的适用范围;FELICE等[10]基于INSEAN循环水槽,利用PIV对螺旋桨旋转角度下纵向平面内的尾流进行了测量分析。目前国内外有关超高速闭式循环水槽试验段流场品质的研究较少,缺乏相关试验数据。
本文基于喷水推进技术重点实验室的超高速闭式循环水槽,利用激光多普勒测速仪(Laser Doppler Velocimeter,LDV)对试验段的流场流速进行测量,为水槽流场品质评估和试验研究提供测试数据支撑。
1 超高速循环水槽的构成及试验能力
喷水推进技术重点实验室采用的超高速循环水槽本体主要由试验段、扩散段、收缩段、拐角段、辅助泵和轴流泵动力系统组构成(见图1),在试验段可形成0 ~10 m/s的常用试验流速,试验段流速最高可达12 m/s。超高速循环水槽部分设计参数及技术指标见表1。图2 为超高速循环水槽试验段示意图,其两侧分别安装8 块有机玻璃观测窗,便于进行流场测量,在试验段可开展喷水推进装置试验、螺旋桨水动力试验和水下航行体流场测试等试验。

表1 超高速循环水槽部分设计参数及技术指标

图1 超高速循环水槽示意图

图2 超高速循环水槽试验段示意图
2 超高速循环水槽试验段轴向流速测量
2.1 试验测量原理及测量系统
本文采用LDV对超高速循环水槽试验段的轴向流场流速进行测量,LDV测量系统主要由数据处理系统、信号处理器、激光器、发射/接收探头和分光器构成,见图3。当流体中的运动粒子的尺寸足够小且跟随性良好时,运动粒子的速度可代表流体的速度。在对流场流速进行测量时,LDV发射出2 支光学性质完全一致的激光束并相交形成测量体;当运动微粒以速度Uy穿过控制体中的干涉条纹区时,会向空间任意方向散射明暗相间的光信号,这样就会得到与运动微粒的速度呈正比的多普勒信号。根据采集到的多普勒频移频率与速度的关系式[11]便可求得运动粒子的速度,由此即可得到流场的流速。多普勒频移频率与速度的关系式为式(1)中:fD为多普勒频移频率;λ为激光波长;κ为光束的1/2 交角度;Uy为光束平面内垂直于交角平分线方向的速度。

图3 LDV测量系统及测量原理示意图
2.2 试验测量方案
在循环水槽试验段建立直角坐标系uOv,选取3 个流速测量截面(测量截面Ⅰ、测量截面Ⅱ和测量截面Ⅲ),其轴向(u向)距离分别为2 100 mm、5 300 mm和8 500 mm,见图4。根据标准[12]在测量截面上选取测量区域,由于循环水槽试验段具有对称性,实际选取的测量区域为矩形ABCD,在x方向上均匀选取8 个流速测量点,在z方向上均匀选取7 个流速测量点,在测量区域上形成8 ×7 的测量点阵列(点间距为100 mm)。通过三维坐标架移动LDV激光测量体对测量点阵列的轴向流速进行测量,每个流速测量点的测量时间为2 min,采集频率为667 Hz。采用不均匀度Cv评估流场流速分布的均匀性,Cv的表达式[13]为

图4 试验段测量截面流速测量点阵列示意图
式(2)中:S为测量点阵列流速的标准偏差;v 为测量点阵列流速的平均值;Cv表征流速相对变异的度量,其值越小,流场的均匀度越高。
试验段来流的紊流度ε等于流速测量值标准差与平均值的比值,其表达式[14]为
式(3)中:Ui为单点轴向流速单次测量值,m/s;U为单点轴向流速测量平均值,m/s;m为测量次数。
在流速测量中,通过控制循环水槽轴流泵动力系统的转速获取试验段中的8 种来流速度(3 m/s、4 m/s、5 m/s、6 m/s、7 m/s、8 m/s、9 m/s和10 m/s),来流速度与轴流泵转速的标定关系式为
式(4)中:U为循环水槽试验段来流速度,m/s;n为轴流泵转速,r/min。
2.3 试验测量装置
测量试验是在喷水推进技术重点实验室超高速循环水槽中进行的,通过LDV对试验段流场流速进行测量,测量装置见图5。在流场流速测量中,LDV的激光器发出具有高亮度、高方向性和波长单纯的激光束,分光器将激光束分成1 对单色光束,利用激光探头将成对的单色光束相交到流场的测量区域内形成测量体。当流场中的粒子经过控制体时,产生散射光,并被接收光路接收。光电转换模块将接收的光信号转换成电信号,数字信号处理器对电信号进行处理,并将多普勒信号从噪声中分离出来进行测量。FlowSizer分析处理软件通过火线与数字信号处理器相连,通过软件对数字信号进行处理之后得到流场的流速值。为确保流场流速的测量精度满足要求,根据循环水槽的实际运行工况对LDV 软件采样参数进行设置,具体参数设置见表2。

表2 LDV参数设置
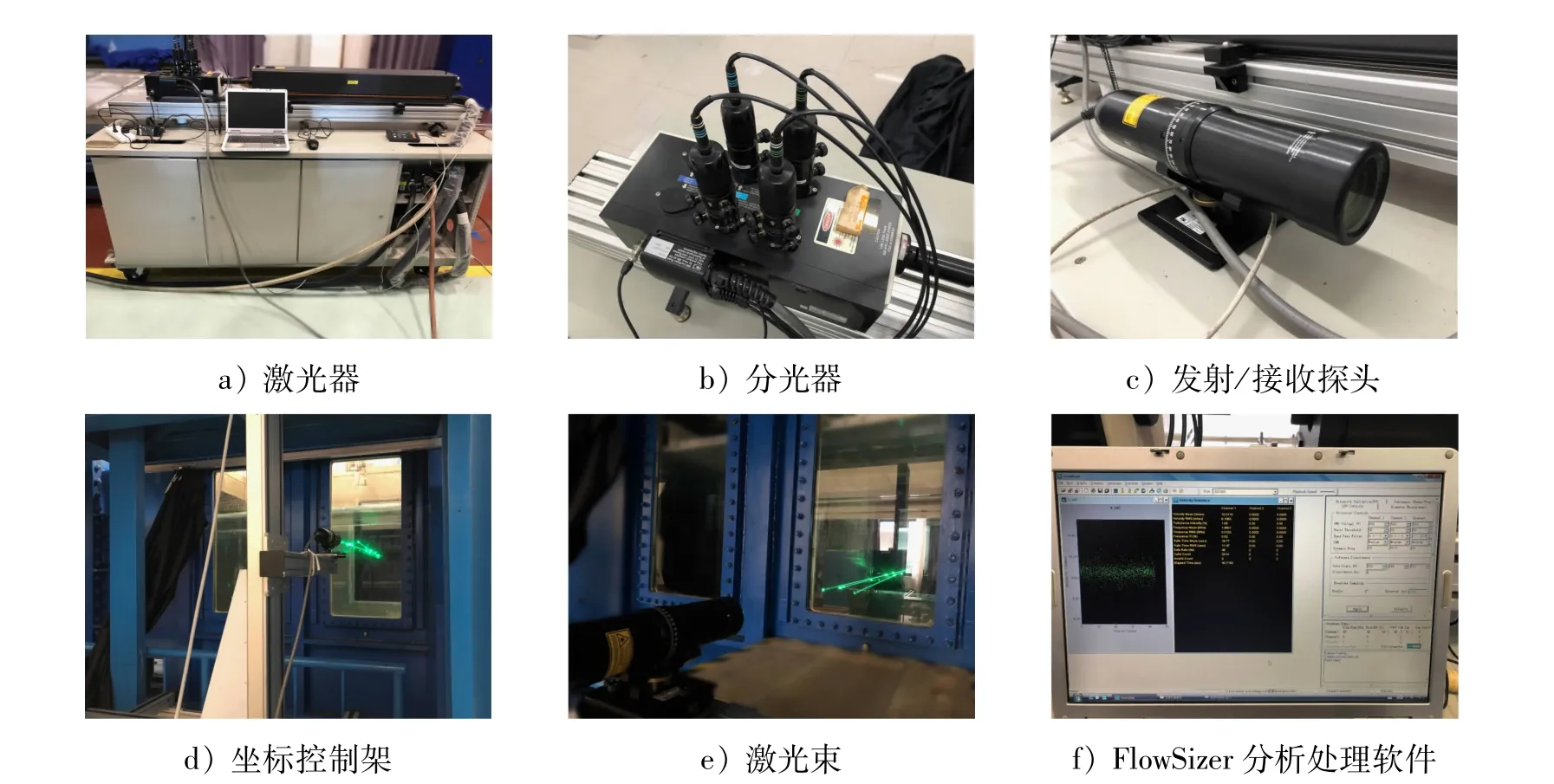
图5 试验段流速试验测量装置图
3 试验测量结果及分析
在8 种来流速度下,根据试验测量方案,通过LDV测得截面Ⅰ、截面Ⅱ和截面Ⅲ上测量区域的轴向流速分布,并计算出这3 个截面上测量区域轴向流速的均值、平均偏差、不均匀度Cv和测量点最大紊流度εmax,计算结果见表3。为便于分析,将表3 中的平均偏差和不均匀度Cv绘制成折线图,结果见图6 ~图8。
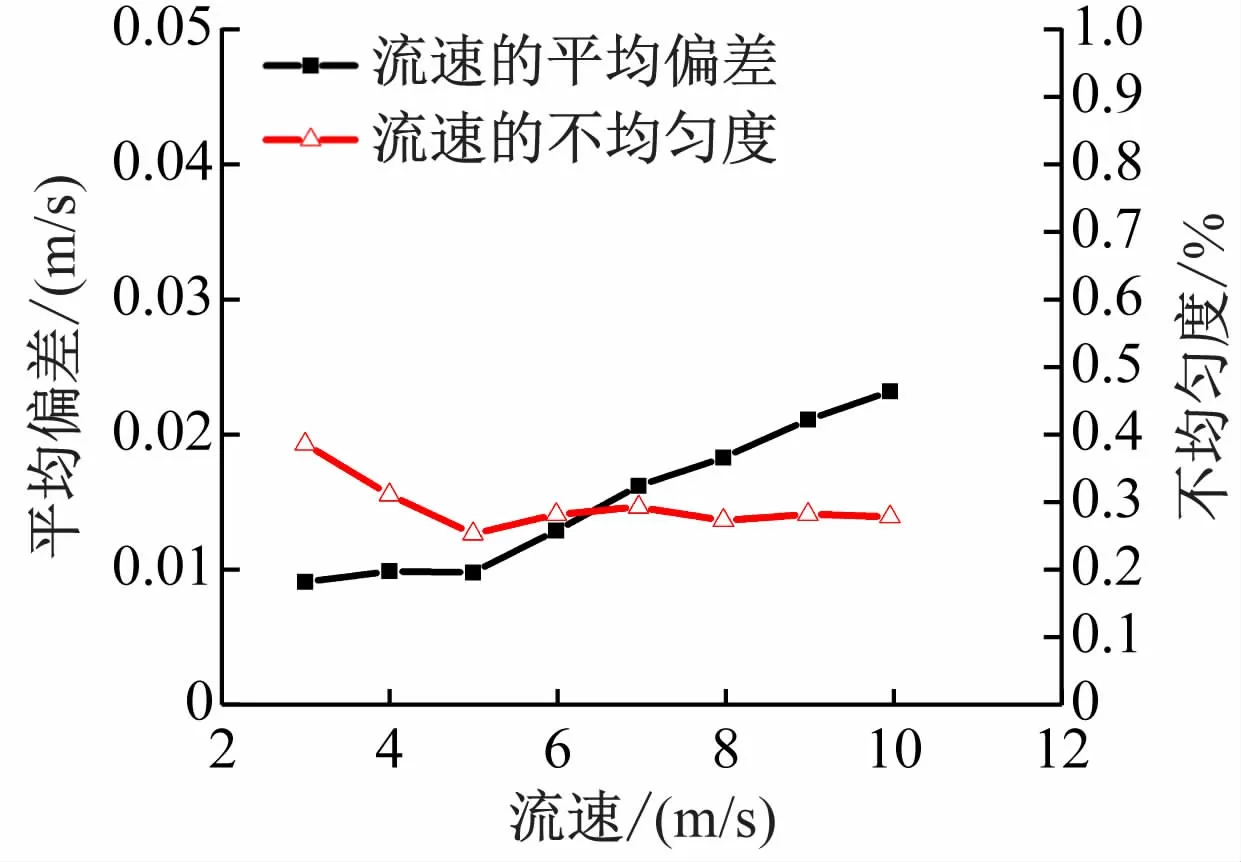
图6 截面Ⅰ上测量区域流速的不均匀度与平均偏差折线图
1)从图6 ~图8 中可看出,3 个截面上测量区域轴向流速的平均偏差均呈现出随着流速的增大而增大的趋势;由表3 可知,截面Ⅰ、截面Ⅱ和截面Ⅲ上测量区域流速的平均偏差的最大值分别为0.023 2 m/s、0.023 8 m/s和0.029 8 m/s。
2)从图6 中可看出,截面Ⅰ测量区域流速的不均匀度在低速区(3 ~4 m/s)较大,在高速区(8 ~10 m/s)较小,在中速区(5 ~7 m/s)呈现出略有上升的趋势。
3)从图7 中可看出,截面Ⅱ测量区域流速的不均匀度在低速区(3 ~4 m/s)较大,在高速区(8 ~10 m/s)较小,在中速区(5 ~7 m/s)呈现出下降的趋势。

图7 截面Ⅱ上测量区域流速的不均匀度与平均偏差折线图
4)从图8 中可看出,截面Ⅲ测量区域流速的不均匀度在流速为4 m/s和7 m/s时较大,均匀度整体波动相对明显。

图8 截面Ⅲ上测量区域流速的不均匀度与平均偏差折线图
5)由表3 可知:截面Ⅰ、截面Ⅱ和截面Ⅲ上测量区域流速的不均匀度Cv的最大值分别为0.385 8%、0.621 3%和0.843 1%,均小于1.000 0%,符合水槽流场品质对均匀度的要求;3 个测量截面的紊流度最大值均小于0.500 00%,测量结果符合设计指标的要求。
4 结 语
本文利用LDV,通过构建流场测量点阵列对超高速闭式循环水槽试验段流场品质进行测量评估。通过试验测得试验段3 个截面上的测量区域在8 种来流速度下的轴向流速分布,并计算分析流场流速的不均匀度和紊流度,主要得到以下结论:
1)截面Ⅰ和截面Ⅱ上测量区域流速的不均匀度在低速区(3 ~4 m/s)较大,在高速区(8 ~10 m/s)较小;截面Ⅰ上测量区域流速的不均匀度在中速区(5 ~7 m/s)呈现出上升的趋势,截面Ⅱ上测量区域流速的不均匀度在中速区(5 ~7 m/s)呈现出下降的趋势;相对于截面Ⅰ和截面Ⅱ上测量区域流速的不均匀度,截面Ⅲ上测量区域流速的不均匀度整体较大,且呈现出明显的波动。
2)在试验段8 m/s来流速度下,3 个流场截面测量区域的紊流度均小于0.5%,满足技术指标的要求。在8 种来流速度下,截面Ⅰ、截面Ⅱ和截面Ⅲ测量区域流场流速的不均匀度最大值分别为0.385 8%、0.621 3%和0.843 1%,均小于1.000 0%,符合循环水槽流场品质设计要求。
猜你喜欢
航空学报(2022年5期)2022-07-04
西北工业大学学报(2021年3期)2021-07-12
模具制造(2019年10期)2020-01-06
工程与建设(2019年4期)2019-10-10
自动化与仪表(2019年2期)2019-03-06
数字通信世界(2019年1期)2019-02-14
金桥(2018年1期)2018-09-28
四川冶金(2018年1期)2018-09-25
中国核电(2017年2期)2017-08-11
北京航空航天大学学报(2016年8期)2016-11-16