
智慧高速路侧感知设备优化布设方法研究
2023-08-19 09:59邱兴友徐志航温金川梁丽娟杜世贝
电子设计工程 2023年16期
邱兴友,徐志航,田 彬,温金川,梁丽娟,杜世贝
(1.浙江杭绍甬高速公路有限公司,浙江 杭州 311241;2.长安大学信息工程学院,陕西 西安 710064)
路侧设备的合理布局在目前智慧高速试点大力推行的形势中起到了尤为关键的作用,为智慧高速各项功能的实现提供了基础。这一问题需要进行合理研究以达到良好的功能要求以及成本约束。
在高速公路交通检测器布设方案以及相关事件检测方法方面,Li[1]、Salari[2-3]、王浩淼[4]、展凤萍[5-6]、何赏璐[7]、程银雁[8]、马雅勰[9]、张雯靓[10]、Bopardikar[11]、Contreras[12]、Gentili[13]、Haber[14]、González[15]、Ye[16]等 人开展了研究,这些研究中都没有给出确定最佳路侧感知设备位置、路侧感知设备数量的布设方案,基于此,该文对这个问题进行了研究。
1 高速公路特性和事件感知原理分析
1.1 高速公路特性
根据我国的道路设计规范,高速公路在设计时,就对各车道设置了明确的速度限制,最低时速规定为60 km/h,最高时速为120 km/h。当高速公路上行驶的车辆车速超过100 km/h 时,应当与同车道的前方行驶车辆保持至少100 m 的安全车距;当车速低于100 km/h 时,与前车车距不得小于50 m。这就造成了正常通行情况下高速公路上车辆的低密度性。智慧高速是在传统高速的基础上进行功能以及服务的提升,在特性上跟传统高速是相同的,基本遵循上述说法。
根据调查研究知,当高速公路车流密度较低、车辆之间相互影响较小,在没有其他外界干扰因素存在的情况下,可以将高速公路上的车流近似看成泊松分布,即在长度为L的路段上有n辆车的概率为:
式中,λ为车辆密度。则路段上的平均车辆节点数为:
由于车辆到达服从泊松分布,车辆到达的时间间隔服从指数分布。假设车辆行驶速度相同,则车辆间的距离x也服从指数分布:
当车流量较小时,在SUMO 仿真平台中模拟的高速公路车流基本符合上述特性,因此可以在SUMO中模拟出高速公路一般情况下的车流场景,用于仿真实验。当车流较大时,车辆间的相互影响较大,当车流某一部分出现异常事件时,会对整个车流运行状态造成巨大影响,这种情况下很容易被快速感知。因此在后续的仿真实验中都模拟高速公路车流量较小的状态。
1.2 事件感知原理
当高速公路上发生交通事件时,会造成事件发生位置前后一定区域内交通流参数发生突变,与正常交通状态下的交通参数相比存在一定偏差,根据偏差的变化幅度大小可以进行交通事件检测研判。当交通参数变化幅度超过设定的阈值范围时,就可以判定事件的发生,如式(4)所示:
式中,Pz为无事件发生的交通流参数;Py为发生事件后的交通流参数;ε为偏差阈值。
因此可以在仿真平台中,分别模拟出高速公路场景下无异常事件发生和有事件发生的情形下,通过设置的检测器,分别检测出各自场景下的交通参数,进行多组试验后得到多组数据,根据式(4)确定有无事件发生交通参数变化的阈值。
检测器可以直接检测出检测范围内的异常事件,该文对于事件的感知依靠检测器的直接感知,以及检测的数据通过上述算法原理间接研判感知相结合[17]。
2 感知原理的仿真实验
2.1 仿真场景设置
在SUMO 仿真平台中基本可以模拟出大部分的高速公路真实场景,参考了国内某条高速公路的相关数据以及历史交通量数据后,该文采用的实验模拟场景为一段5 km 的三车道高速公路,三条车道从上到下的限速分别为120、100、80 km/h,总车流量为1 266 veh/h,车流符合高速公路基本特性。
通过使用SUMO 中自带的检测器模块,如图1中白色部分所示,可以检测出通过该检测器车流的流量、速度、占有率等交通参数。因此可以在模拟路段的任意位置布设检测器用来检测交通流参数,分别得到模拟的正常高速场景和有异常事件交通流参数,对比其是否在出现异常事件的时候交通流参数出现变化,并计算变化幅度值以此验证异常事件感知原理是否可以在仿真软件模拟的场景实验中成立,最终用来确定指导检测器布设方案的可行性。

图1 SUMO模拟的高速场景基本图
2.2 检测器布设仿真实验
根据对高速公路典型异常事件的分析,该文选用异常停车事件进行仿真研究,预先设置异常停车位置为路段的1 km 处,考虑到事件发生后的影响区域范围,在路段的0.8 km 以及1.2 km 处的车道上布设SUMO 自带的检测器,先仿真进行无异常事件发生状态,如图2 所示,车流按照设置正常运行;再进行异常停车事件场景的仿真,如图3 所示,带有三角符号的异常车辆在1 km 处停车造成车道排队堵塞。分别开展两种情形的仿真实验,通过设置的检测器得到交通流参数数据,这些数据每50 s 上传一次,并存储在SUMO 的对应文件下。
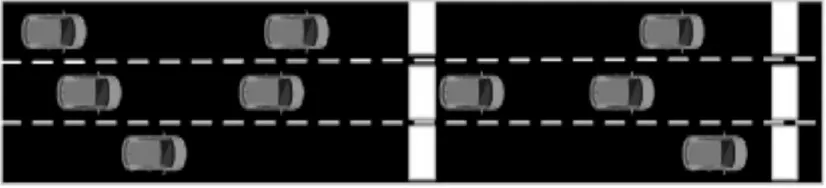
图2 正常场景示意图
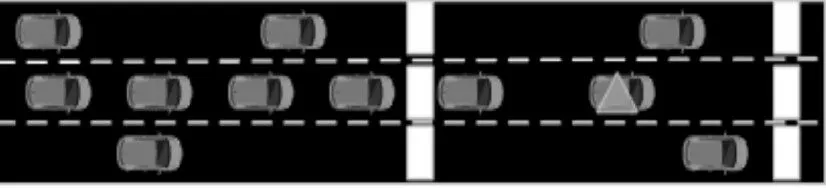
图3 异常事件场景示意图
每一个场景总体仿真3 800 s 至完全仿真结束后,这些检测器将检测到的数据输出,得到有无事件发生时的交通流数据,将这些数据进一步处理后可以得到交通流参数变化图,并计算出各交通流参数的变化幅度。
如图4 所示,总交通量为1 266 veh/h 时,有无事件发生情形下,设置的检测器检测出来的交通流参数均出现一定的变化。
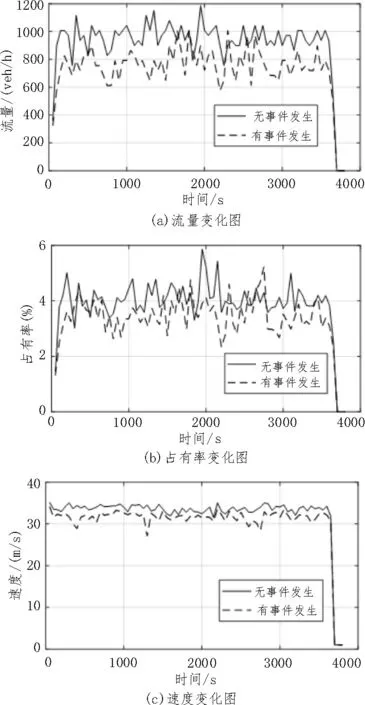
图4 有无事件发生交通流参数变化图
根据式(4)分别计算这三个参数在有无事件发生的变化幅度,得到流量的变化值为19.906 4%;占有率的变化值为14.033 8%;速度的变化值为8.833 4%。
为了进一步验证这些变化值是否合理,改变总体交通量分别为900、1 500、1 800 veh/h,在其他参数完全不变的情况下开展多组仿真实验,进行上述的实验操作得到表1 中的不同总体流量下交通流参数在有无事件发生的情形下的变化值。根据表1 的结果可以验证基于交通流参数变化来判断事件发生的间接检测方法在SUMO 仿真实验中的可行性,并且各交通流变化幅度随着总体交通流量增大而增大。

表1 不同车流量下交通流参数变化值
事件检测算法的阈值的界定需要进行多组实验最终根据结果进行合理选取,最终界定后,当参数变化值超过阈值后,即可判定事件发生,并且得到相应的事件检出时间。
3 路侧设备布设方案优化研究
3.1 路侧设备布设方案优化仿真场景设置
该文在此研究纯视频检测器布设方案下不同的布设间距对交通事件以及交通事件的感知效果,结合考虑总体的布设成本以此对布设间距进行优化处理,最终选择一个效益好的布设间距。经过调研后得知,目前厂家生产的视频监控设备大致的检测距离为单向75 m 左右,在检测距离内可以立即检测出异常交通事件以及交通流参数。在SUMO 里面的检测器模块进行的点检测不考虑工作半径。然而在智慧高速的建设中,相关路侧感知设备布设间距都比传统高速的布设间距小的多,因此在一定的布设间距中,需要考虑视频监控设备的检测距离来指导整个方案的布设。在该文中通过SUMO 和OMNET++两个双向耦合仿真平台来实现上述功能,在OMNET++里调用RSU 通信设备,通过车与RSU 通信来替换视频监控设备的相关检测功能,视频监控设备的检测半径通过设置RSU 的通信半径来替换,基于此就可以实现纯视频布设方案模拟检测场景。
因此,同样设置一段5 km 的三车道高速公路,三条车道从上到下的限速分别为120、100、80 km/h,总车流量为1 266 veh/h,车流符合高速公路基本特性。如图5 所示,模拟的范围检测器按150 m 的间隔布置,其中每个模拟的范围检测器的通信半径为75 m,如图5 中虚线所示,在通信半径内可以获得车辆的交通流参数信息,并且异常停车事件发生在范围内立即上报。

图5 模拟范围检测器图
如果异常事件没有发生在检测器检测范围内,则需要用交通参数的变化幅度达到设定阈值这一原理来间接判断事件的发生。场景构建后进行仿真实验,数据每隔10 s 上传一次,仿真300 s 得到正常情况下纯视频布设方案的流量和速度数据,与SUMO自带点检测器检测模块检测到的数据进行对比,对比结果如图6 所示。
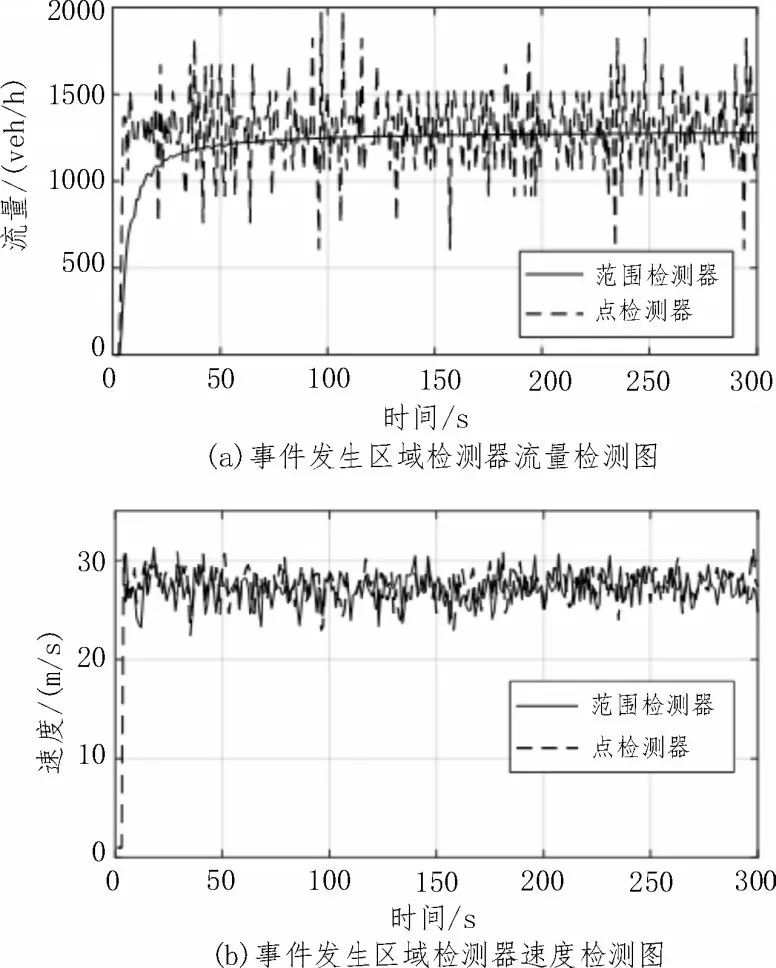
图6 两种检测器数据对比图
从图6 中可以看出,两种检测器的检测准确度是基本一致的,为了定量验证一致性,对两种检测器检测的数据进行整体平均,得到两者检测的流量以及速度数据,对两者进行差比,结果如表2 所示,两种检测器检测到的数据基本一致。因此验证了模拟的纯视频布设方案在考虑视频检测范围来进行仿真实验的可行性。

表2 范围检测器和点检测器对比
3.2 路侧设备优化布设仿真实验
在设置好的模拟高速公路场景内,先设置纯视频方案的检测器布设间距为150 m,其中设置的视频检测距离为75 m,在这75 m 内,发生的异常交通事件会被及时直接检测感知,当发生在检测距离外的异常交通事件由事件感知公式间接检出。经过调研,在该文中,取异常事件发生时,总体车流的速度参数变化幅度超过正常情况下总体车流速度的25%时,判定事件发生。因此后续实验结果选取检测器检测的交通流速度参数进行结果分析。
在仿真实验中,随机模拟出异常事件在路段的任意位置任意时刻发生,通过视频检测器检出正常情形下以及异常事件发生情形下的交通流速度参数。事件随机的发生位置和事件在仿真模拟完成后可以在输出文件中得知,仿真进行300 s,如图7 所示是一组随机模拟事件发生在检测器检测范围外的实验结果,对数据进行处理后,得到两种情形下总体速度的变化图。

图7 检测速度参数变化图
根据图7 中两条曲线的变化差异可以得出事件发生区域周围的检测器序号为检测器3、4、5、6、7、8,调取这些检测器的速度检测值,与正常情况下这些检测器检测的速度值进行对比,当速度变化幅度大于设置的阈值时,即可判定事件的发生,得到事件的检出时间,如图8 所示,可以得到异常事件发生时受影响的检测器的速度检测值与正常情形下的速度检测值。

图8 正常情况和事件发生周围检测器速度变化图
计算出从速度开始出现变化时到速度变化超过设定阈值的时间,取这几个检测器计算得到的检出时间最小值,得到在布设间距为150 m 的场景下,纯视频检测器方案对事件的间接检出时间为15 s。后续进行了20 组随机异常事件模拟实验,按照事件检测算法和检测器直接结合得到事件检测效果,最终取检出时间的平均值得到150 m 布设间距下纯视频方案对异常事件的检出时间为12 s。
遵循上述思路,调整布设间隔为225 m、300 m、400 m,分别重复上述实验,得到不同间距下的事件间接检出时间,如表3 所示。
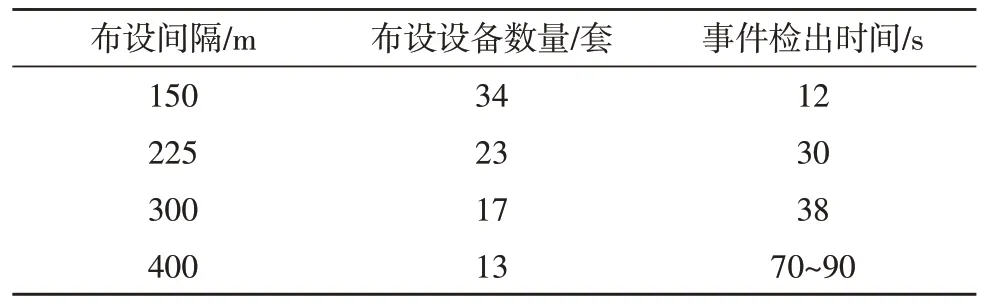
表3 不同布设间距下事件检出结果
从表3 的结果知,在布设间隔为400 m 时,事件检出时间大幅度增加,布设间隔为300 m 时,基本满足所需的时间检测应急需求,并且事件检出时间与前面变化不大,并且综合考虑布设成本因素,对布设方案进行优化比较,最终选取300 m 作为纯视频布设方案的布设间隔。
4 结束语
该文在仿真软件中模拟现实高速公路场景,通过SUMO 仿真平台验证出有无事件发生情况下,模拟的检测器检测出的交通流参数是否满足事件检测算法的理论要求。通过OMNET++与SUMO 双向耦合平台模拟出在不同间距布设条件下要考虑视频检测器检测范围的情形,在这种情形下得到了不同布设间距下异常事件的检出时间。综合考虑布设成本以及检测效益,最终确定一个较为合适的布设间距来指导纯视频布设方案的布设,以此在保证达到交通管控检测需求的同时,使得路侧设备布设成本降低。该文的不足之处在于优化布设考虑得太过粗糙,在未来工作中可以对检测效益和成本等参数进行建模,然后求解出各类检测设备的合理布设间距,以此来指导路侧设备布设。
猜你喜欢
中国交通信息化(2019年4期)2019-07-13
中国交通信息化(2017年9期)2017-06-06
西南交通大学学报(2016年3期)2016-06-15
小学生导刊(低年级)(2016年5期)2016-05-27
工业设计(2016年11期)2016-04-16
中国工程咨询(2016年1期)2016-02-14
数学年刊A辑(中文版)(2014年1期)2014-10-30
印制电路信息(2014年11期)2014-03-11
河南科技(2014年22期)2014-02-27
食品科学(2013年8期)2013-03-11
