
基于粒子群优化的喷施无人机PID 控制*
2023-08-22 04:15姜舒涵张新悦周彦君王萌谋曹湘雨梁靖贤应安青
南方农机 2023年17期
姜舒涵 ,庞 涛 ,张新悦 ,周彦君 ,王萌谋 ,曹湘雨 ,梁靖贤 ,应安青
(四川农业大学机电学院,四川 雅安 625000)
0 引言
中国自古以来便是农业大国,有悠久的农耕历史。农业灌溉中,药物喷施始终是重中之重。在如今的喷施作业中,人工作业仍占有很大比重。然而,对于大面积耕地来说,人工喷施效率低下、农药利用率低、成本高[1]。近年来,随着绿色农业、精准农业的需求不断提高,国内农业逐步向机械化、自动化、规模化、多样化、精细化方向发展,转向“高产、优质、高效、安全、生态”的发展方式,致力于建设“优质、安全、生态”的现代农业,因此正迫切需要高效率、低污染、自动化机械装备[2]。目前,高速发展的无人机技术能够很好地代替大面积的人工喷施,可以提高效率,降低成本[3]。但现如今的喷施无人机在动态复杂环境下,仍存在施药响应不够精确快速、稳定性欠佳等问题[4]。
基于以上现状,本文设计了一种基于粒子群优化的喷施无人机PID 控制方法,能根据具体操作环境,实时调节药液泵转速,实现不同环境下施药量的最优化控制,进而有效减少农药浪费,提高农药利用率。在此基础上,将该系统与传统PID 控制及GA 算法优化PID 控制系统进行比较,分析三者在喷施系统控制上的性能,以期为构建精度高、稳定性强的无人机喷施系统提供技术支持。
1 被控系统数学模型的建立
获得准确的数学模型是开展动态环境下喷施无人机药液泵控制的前提。在无人机喷施系统中,可将药液泵供药视为一种时变压力的稳压供水系统。稳压供水系统通过调节变频器改变水泵的供水量,从而达到稳定水压的目的,其机理[5]是从恒压供水演变而来,分为压力上升阶段和恒压阶段。其中,压力上升阶段是一阶惯性环节,恒压阶段为纯滞后环节。因此,供药系统模型可表示为[6-8]:
式中,G1——供药系统传递函数;T1——供药系统的惯性时间常数;k1——供药系统的增益;τ——供药系统的时滞常数;s——拉普拉斯变换域中的频率,是一个复数变量;np——传递函数输入,即供药系统中离心泵的转数;p0——传递函数输出,即供药系统的出口压力。
变频器和药液泵电机可近似为等效时间常数T2的一阶惯性环节,可表示为:
式中,G2——调速系统传递函数;T2——调速系统的惯性时间常数;k2——调速系统的增益;s——拉普拉斯变换域中的频率,是一个复数变量;fc——传递函数输入,即供药系统中变频器的输入频率;nm——传递函数输出,即供药系统中电机的转速。
系统中其他控制及检测环节与供药系统的时间常数相比可以忽略,可以看作一个比例环节:
式中,G3——其他系统传递函数;k3——其他系统增益。
设定喷施系统采用离心泵供给药液,则该系统中电机的转速等于离心泵的转速,因此整个供药系统的模型可以表示为上述3个环节的串联模型,即:
式中,G——系统传递函数;k——系统的总增益。
在一定范围降频、参数变化小等工况中,可以认为系统模型是一阶惯性加时滞的模型,但当系统处于升频或参数变化较大、较快的过程中,系统模型变为二阶惯性加时滞模型,其结构较为复杂。本文选择系统处于升频状态,因此系统模型为二阶惯性加时滞模型,模型传递函数为[7]:
2 基于PSO算法的PID控制系统设计
2.1 PID控制
P I D 控制系统由被控对象和控制器构成[6],PID 控制器由比例单元(Proportional)、积分单元(Integral)和微分单元(Differential)构成。PID 控制器根据设定值r(t)和实际输出值c(t)偏差,通过比例、积分、微分的运算得到控制量,进而对控制对象进行控制。PID控制系统原理框图如图1所示。

图1 PID 控制系统原理框图
PID 控制是比例、积分、微分控制规律的线性组合,其输入输出关系表示为:
式中,Kp为比例系数;Ti为积分时间常数;Td为微分时间常数;r(t)为被控对象设定值;c(t)为实际值;e(t)为系统误差;u(t)为控制器的输出量。
积分系数为:
微分系数为:
通过拉普拉斯变换,可得PID 控制器的传递函数为:
式中,U(s)为输出函数,E(s)为输入函数。
喷施系统具有非线性、滞后性和时变性的特点,需要实时整定Kp、Ki、Kd三个参数,但传统的PID 控制参数不可动态调节,且依赖人为经验。因此,本次研究首先采用GA 算法优化PID 控制,实现对PID 参数的实时更正。
2.2 GA算法优化PID控制
遗传算法(Genetic Algorithm, GA)是一种自适应全局寻优算法[8]。其基于达尔文生物进化论的自然选择和遗传学机理,对自然界中生物的遗传和进化过程进行计算机模拟,搜索问题的最优解。GA 算法流程图如图2所示。
图2 GA算法流程图
在喷施系统的GA-PID 控制研究中,以电机转速的真实值和预设值之差e(t)、响应曲线的超调量pos、上升时间tr和峰值时间ts构建目标函数:
式中,w1、w2、w3、w4为权重。
通过GA 算法的优化程序和参数调整,得到PID参数Kp、Ki、Kd的最优解,相较于传统的PID 控制,喷施系统的稳定性、快速性和准确性均得到提高。
本次研究不仅设计出GA 算法优化的PID 控制器,还将PID 控制和粒子群优化算法相结合,对PID控制参数进行更精确的调整,以达到精度高、稳定性好的喷施控制效果,进而实现精准喷施。
2.3 基于改进PSO算法的PID控制器设计
2.3.1 粒子群算法
粒子群算法(Particle Swarm Optimization, PSO)为智能优化算法,是通过模拟鸟群觅食行为而发展起来的一种基于群体协作的搜索算法[9]。PSO 能够解决非线性、不可微和多峰值等复杂系统的优化问题,具有自适应能力强、收敛速度快且易于实现的优点,适用于喷施系统PID 控制器的参数整定。粒子群算法的表示如下,在N维的搜索空间中,总粒子数为n,粒子i的空间位置表示为:
第i个粒子的速度表示为:
将每个粒子的位置代入目标函数,即可计算出适应值fi,根据适应值的大小衡量粒子空间位置Xi的优劣。第i个粒子目前搜索到的最优位置表示为:
粒子群目前搜索到的最优位置表示为:
粒子不断更新自己的位置和速度,其变化公式如下所示:式中,ω为粒子的惯性权重;c1、c2为学习因子;r1、r2为在区间(0,1)上均匀分布的随机数;分别为粒子i在t时刻和t+1 时刻的速度,分别为粒子i在t时刻和t+1时刻的位置。
粒子的自我认知部分为:
粒子的社会认知部分为:
粒子的社会认知部分反映粒子和整个粒子群的信息交流[10]。一般情况下,学习因子c1=c2=2,惯性权重ω取0.9。
2.3.2 改进PSO算法优化PID控制
PSO 算法具有计算效率高、算法简单的优点,但容易陷入局部极值。在PSO 算法中,惯性权重ω体现粒子以前速度对当前速度的影响,较大的惯性权重有利于全局搜索,较小的惯性权重有利于局部搜索。因此,需要调整合适的惯性权重,平衡PSO 算法的全局搜索和局部搜索的能力[11]。本文选用自适应惯性权重的改进方法,对于喷施系统的PID 控制,适应度越小,距离最优解越近,选用局部搜索;适应度越大,距离最优解越远,选用全局搜索[12-14]。自适应惯性权重的调整公式为:
式中,ωmin和ωmax为预先设定的最小惯性系数和最大惯性系数。
t时刻所有粒子的平均适应度为:
t时刻所有粒子的最小适应度为:
改进PSO 算法可以有效搜索不同区域,得到全局最优解。
喷施系统的PID 控制器由Kp、Ki、Kd三个参数决定,则PID 控制器的参数优化是三维函数的优化问题[15-17]。基于改进PSO 优化算法的PID 控制流程如下:
1)初始化参数,设置粒子数量、变量个数、学习因子、惯性权重、迭代次数等参数;
2)随机初始化粒子所在的位置和速度;
3)计算出每一个粒子的适应度,本研究选用ITAE指标作为适应度函数,其定义为:
4)更新每个粒子的速度和位置,并进行调整;
5)重新计算粒子的适应度,并进行比较;
6)通过更新粒子的位置和速度,得到全局最优的粒子;
7)若达到迭代次数,则结束循环;若未达到迭代次数,则返回步骤4。
基于改进的PSO 算法可实现PID 控制器的参数优化,适用于喷施系统的PID控制。
3 算例验证及实例求解
为了验证控制效果,采用MATLAB 搭建了控制仿真系统。基于PSO 的PID 控制系统设计流程如图3 所示,该系统下文中采用PSO-PID 表示。根据已构建的喷施水泵数学模型,在Simulink 中搭建PSO-PID仿真模型,如图4所示。

图3 基于PSO的PID 控制系统设计流程图

图4 Simulink中搭建PSO-PID 仿真模型
分别基于PID、GA-PID、PSO-PID 控制算法,对以上系统进行仿真实验。首先,设定水泵电机转速目标量为500 rad/s,PSO 算法的参数选择如下:种群规模为100;最大迭代次数为50 次;最小适应值为0.01;惯性权重最大值为0.9,惯性权重最小值为0.1;学习因子为0.2;维数为3,得到PSO 最优个体适应值曲线和Kp、Ki、Kd优化曲线,如图5、图6 所示。为了验证该参数的普遍性,在不改变控制参数的前提下,设定目标量为1 400 rad/s 与2 500 rad/s 再次实验,分别得到目标量为500 rad/s、1 400 rad/s、2 500 rad/s的控制曲线对比图,分别如图7、图8、图9 所示。

图5 最优个体适应值

图6 Kp、Ki、Kd优化曲线

图7 目标量为500 rad/s的控制曲线对比图

图8 目标量为1 400 rad/s的控制曲线对比图
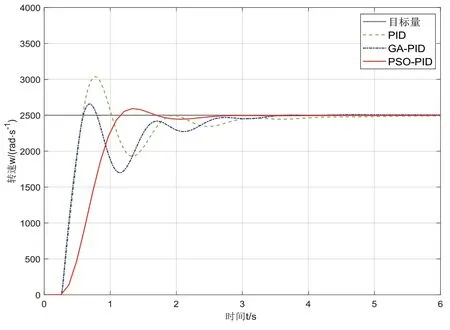
图9 目标量为2 500 rad/s的控制曲线对比图
由图5 可知,目标量为500 rad/s 时,在第46 次迭代找出了该适应度函数的最优适应度,值为158.970 4。由图6可知,最佳个体Kp值为0.206 8;Ki值为0.155 98;Kd值为0.044 685。为消除随机因素的影响,根据目标量为500 rad/s 时的参数,设定目标量为1 400 rad/s 与2 500 rad/s 再次实验。由图7~9 可知,PID的调节时间长且超调量大,GA-PID 的调节时间较长且超调量较大,PSO-PID 的性能均优于PID 和GA-PID 控制。
表1 展示了3 次控制实验中,不同目标量控制算法的平均性能指标对比。由此可见,PID 的平均调节时间为2.688 s,GA-PID 的平均调节时间为2.396 s,PSO-PID 的平均调节时间为1.037 s;PID 的平均超调量为21.52%,GA-PID 的平均超调量为6.25%,PSOPID的平均超调量为2.83%。

表1 三个不同目标量控制算法性能比较
综上所述,PSO-PID 的平均调节时间更短,达到稳态值更快,且超调量更小,稳定性更强,因此喷施水泵供水控制系统基于粒子群优化的PID 控制效果最优,可应用于喷施无人机控制系统。
4 结论
1)课题组提出了一种基于PSO 的喷施无人机控制方法,能够实现动态环境下的喷施无人机控制。
2)MATLAB 仿真表明,基于PSO 算法优化的PID 控制在水泵供水控制中的平均调节时间最短、达到稳态值最快、超调量最小且稳定性相对最强,通过PSO-PID 可以实现无人机智能喷施系统中的最优控制效果。
3)通过构建PSO 喷施水泵数学模型,基于PSO算法优化的PID 控制稳定性及动态性能较好,可以很好地克服传统PID 以及GA-PID 算法出现的稳定性以及稳定性较差的问题,可有效提高实际喷施过程中的喷施效率。
猜你喜欢
中学生数理化·八年级物理人教版(2023年3期)2023-03-21
计算机仿真(2022年8期)2022-09-28
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
测控技术(2018年7期)2018-12-09
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
光学精密工程(2016年4期)2016-11-07
小学科学(学生版)(2016年1期)2016-10-09
中国塑料(2016年11期)2016-04-16
电测与仪表(2014年11期)2014-04-04
教育与职业(2014年16期)2014-01-19
