基于线控转向的差动转向控制策略研究
2023-09-05 02:04王家钥常九健
合肥工业大学学报(自然科学版) 2023年8期
王家钥, 常九健
(1.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 2.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009)
近年来,在节能减排上有着重要优势的新能源汽车取得巨大发展,汽车工业已将新能源汽车列为研究重点之一。分布式电驱动汽车因其具有体积小、质量轻、效率高、控制性能良好以及能将电动车辆的机械部分大大简化的优势和特点,得到了学术界和工业界的高度关注。
传统履带车的滑动转向给出了差动转向设计思路,研究者于1999年提出了通过改变差动力矩转向方式的概念,经过多年发展形成了差动转向技术。文献[1]采用了基于线控转向的差动转向控制策略,设计当线控转向系统故障时的差动转向辅助控制,考虑线控转向系统和悬架对差动转向的影响,基于输出反馈理论主要研究车辆差动转向的防侧翻控制,提高了汽车在垂直方向上的稳定性;文献[2]在路径跟踪问题的基础上重新定义横摆角速度期望值,实现对期望横摆角速度和侧向速度的跟踪,采用线性时变模型来预测未来某一时间段的系统响应,采用动态规化算法对横摆角速度实现闭环控制,将路径跟踪问题转化为无人驾驶车辆行驶稳定性问题;文献[3]通过BP神经网络训练各工况理想阿克曼转向关系下的各车轮轮速和驱动力矩来直接实现差动转向,但对汽车滑移率的控制效果较差;文献[4]设计了变结构滑模控制器,通过DYC&AFS的协同控制使汽车横摆角速度和质心侧偏角趋于理想值,但在质心侧偏角过大时,车辆无法再按期望路径行驶,丧失稳定性。
上述文献多以横摆角速度和质心侧偏角[5]作为稳定性控制指标,但汽车线性二自由度车辆模型对质心侧偏角计算不精确,容易造成以差动转向汽车作为转向策略的整车因侧倾而丧失稳定性。本文基于线控转向执行机构,以横摆角速度和期望路径为稳定性控制指标,研究一种协同控制策略,其中包括差动转向控制策略和路径跟踪控制策略。
通过轮毂电机驱动汽车的各车轮独立可控制的优势,对电动汽车各轮转矩和转速进行直接控制。因此本文以此设计控制器控制左右车轮的驱动力矩差,产生额外的横摆力矩[6],一方面可以直接作用于转向系统使车轮向驱动力矩小的一侧转动,另一方面可改善车辆的稳定性。差动力矩不可直接应用到各车轮,本文建立下层控制器将上层控制器得到的差动力矩分配[7]到各驱动车轮,以驱动车轮转向。同时,本文提出以期望横摆角速度和期望路径作为稳定性判断指标,研究一种基于路径跟踪的控制策略,修正电动汽车前轮转角[8]来减小与期望路径的误差,提升汽车的横向稳定性。
1 协同控制策略原理
本文以线控转向机构为转向执行机构,在本文设计的差动转向算法下实现驾驶员的目标转向,同时以车辆横摆角速度和期望路径为标准实现车辆稳定性控制,提升差动转向的可行性。本文所设计的协同控制策略流程如图1所示。

图1 协同控制策略流程
协同控制策略实现过程如下:
1) CarSim输出车辆纵向车速vx和实时方向盘转角δ到二自由度车辆模型,得到理想横摆角速度ωd。
2) 滑模控制器得到实际横摆角速度ωr、实际质心侧偏角β和理想横摆角速度ωd,计算得到差动转向所需横摆力矩。
3) 下层转矩分配器计算得到各轮的转矩T。
4) CarSim将车辆横向车速vy、横摆角φ、车辆实际路径输入线性二次型调节器(linear quadratic regulator,LQR),同时将车辆期望路径输入LQR控制器,得到前轮附加转角δfex。
5) 车辆经下层转矩分配器重新分配各轮转矩T,输入CarSim车辆模型,实现差动转向;同时,LQR控制器得到前轮额外转角δfex,输入CarSim(由线控转向机构作为执行机构),实现对期望路径的跟踪。
2 差动转向控制策略设计
2.1 整车动力学建模
本文选用线性二自由度车辆模型[8]作为参考模型来获取操纵稳定性控制所需的横摆角速度,参考模型如图2所示,整车模型主要参数见表1所列。

表1 整车模型主要参数

图2 二自由度汽车模型
车辆二自由度状态方程如下:
(1)
其中
其中:k1为前轮侧偏刚度;k2为后轮侧偏刚度;m为质量;a为质心到前轴的距离;b为质心到后轴的距离;vx为车速;β为质心侧偏角;δ为前轮转角;Iz为车辆纵向转动惯量。由此可得线性二自由度车辆模型动态变化的理想横摆角速度ωr。
理想横摆角速度受轮胎侧向力极限和路面附着系数的制约,因此考虑满足不同路面附着系数的理想横摆角速度为:
(2)
其中:K为稳定性因素;μ为路面附着系数;g为重力加速度。
2.2 滑模控制器设计
本文采用滑模变结构控制器[9],其具有快速响应、设计简单的特点,对外界干扰有较强的鲁棒性,能够克服系统的不确定性。
考虑差动力矩,得到基于车辆二自由度状态方程的差动转向的状态空间方程,即

(3)

滑模控制器设计选择对理想横摆角速度和实际横摆角速度的差值e进行控制。
选择切换面函数为:

(4)
对切换函数求导可得:
(5)
选择为了使系统能够快速收敛到滑模面,减小抖振,采用幂次趋近率,即
(6)
其中:ε为系统趋向于滑模面的速度,ε越大速度越快,但引起的抖动也越大;α控制系统在远离滑模面时快速趋于滑模控制面,在趋于滑模面时控制系统抖振动。为消除由幂次趋近率带来的滑模抖振,采用饱和函数sat代替符号函数sgn,即
(7)
联立式(4)~式(8)可得所需理想差动力矩为:
(8)
2.3 下层控制器设计
上层控制器得到的差动力矩无法直接应用到轮毂电机驱动汽车上,需要设计下层力矩分配器来分配各车轮所需驱动力[10]。
将总驱动转矩Tq进行载荷转移动态分配[11],考虑纵向加速度ax的影响,前、后轴的载荷可表示为:
(9)
其中:Fzf、Fzr分别为前轴和后轴的垂直载荷;hg为质心高度。根据前、后轴的动态载荷比分配前、后轴驱动力矩为:
(10)
其中:Tf、Tr分别为前轴和后轴的驱动力矩。
车辆转向时存在的侧向加速度ay会导致左右车轮之间的载荷转移,差动转向同样要考虑左右车轮的垂直载荷来分配各轮驱动力矩,各车轮的垂直载荷为:
(11)
其中:Fzfl、Fzfr、Fzrl、Fzrr分别为左前轮、右前轮、左后轮、右后轮的垂直载荷;d为轮距。
经动态分配后的各轮驱动力矩为:
(12)
其中:Tfl、Tfr、Trl、Trr分别为左前轮、右前轮、左后轮、右后轮的驱动力矩;Reff为轮胎有效转动半径;lc为轮距的1/2。
3 路径跟踪控制策略设计
3.1 路径跟踪模型
路径跟踪的目标[12-13]为减小车辆与期望路径的横向误差和航向误差,原理图如图3所示,图3采用自然坐标系。

图3 路径跟踪模型
图3中:点T为车辆真实位置在期望路径上的投影点;d为本文定义的横向误差;ψ为航向误差,ψ=θ-θd;点C为车辆质心;X为车辆真实位矢;Xr为车辆目标位矢。路径跟踪通过对前轮转角的修正来减少横向误差和航向误差。
3.2 建立控制目标状态空间方程
车辆二自由度动力学方程为:
(13)
其中
定义真实位矢X与目标位矢Xr的矢量差为误差er,u为前轮转角,可得关于误差er的方程为:
(14)
(15)
其中:v为车辆质心的速度矢量;k为T点处的曲率。
横向误差的导数为:
(16)
令ed=d,eφ=φ-θd,其中,φ=θ-β,β为质心侧偏角。

(17)
整理得状态方程:

(18)
其中
3.3 设计路径跟踪控制器
3.3.1LQR反馈控制器设计
LQR通过权矩阵Q和R确定二次型目标函数J的最小值,可得最优的状态线性反馈控制规律,易于构成闭环最优控制,并可兼顾多项性能指标。
本文设计的LQR控制器需将状态方程(18)离散化为:
(19)

由Riccati方程求解P,即
迭代得:
(20)
3.3.2 前馈控制器设计
(21)
记

(22)
为消除稳态误差err,引入前馈控制δfex,即
err=
求得ed=0时的前轮附加转角,即
(23)
引入前馈控制后,有
u=-Ker+δfex
(24)
其中,u为式(19)的控制量,通过前轮附加转角对前轮转角的修正,可减小真实位矢X与目标位矢Xr间的误差er[14]。
4 仿真分析
为验证算法的有效性,本文以国标GB/T 12549—2013中的移线试验(lane change test)和蛇形试验(pylon course slalom test)来验证汽车的机动性、响应性和稳定性,以此来评价算法的有效性。
移线试验道路标准为:以(80±3) km/h的速度行驶通过,试验车道如图4所示。

图4 移线试验车道
图4中:第1段长70 m;第2段长20 m;第3段长30 m;第4段长20 m;第5段长10 m;6为车道偏移,为3.5 m。蛇形试验标准为:以(60±3) km/h的车速,绕间距18 m的标桩行驶。
本文选取以上2种工况,比较轮毂电机驱动汽车在无控制、滑模控制、滑模控制与路径跟踪控制综合的控制器(下文称综合控制)下的控制效果。
4.1 移线试验
在80 km/h时速移线试验中,横摆角速度变化如图5所示。

图5 移线试验横摆角速度变化
在80 km/h时速移线试验中,无控制时的滑移率变化如图6所示,经综合控制的滑移率变化如图7所示。

图6 移线试验无控制时滑移率变化

图7 移线试验综合控制下滑移率变化
在80 km/h时速移线试验中,各控制策略下路径如图8所示。

图8 移线试验各控制策略路径
4.2 蛇形试验
在60 km/h时速蛇形试验中,横摆角速度变化如图9所示。

图9 蛇形试验横摆角速度变化
在60 km/h时速蛇形试验中,无控制时的滑移率变化如图10、图11所示,其中图11是图10的部分放大;经综合控制的滑移率变化如图12所示。

图10 蛇形试验无控制时滑移率变化
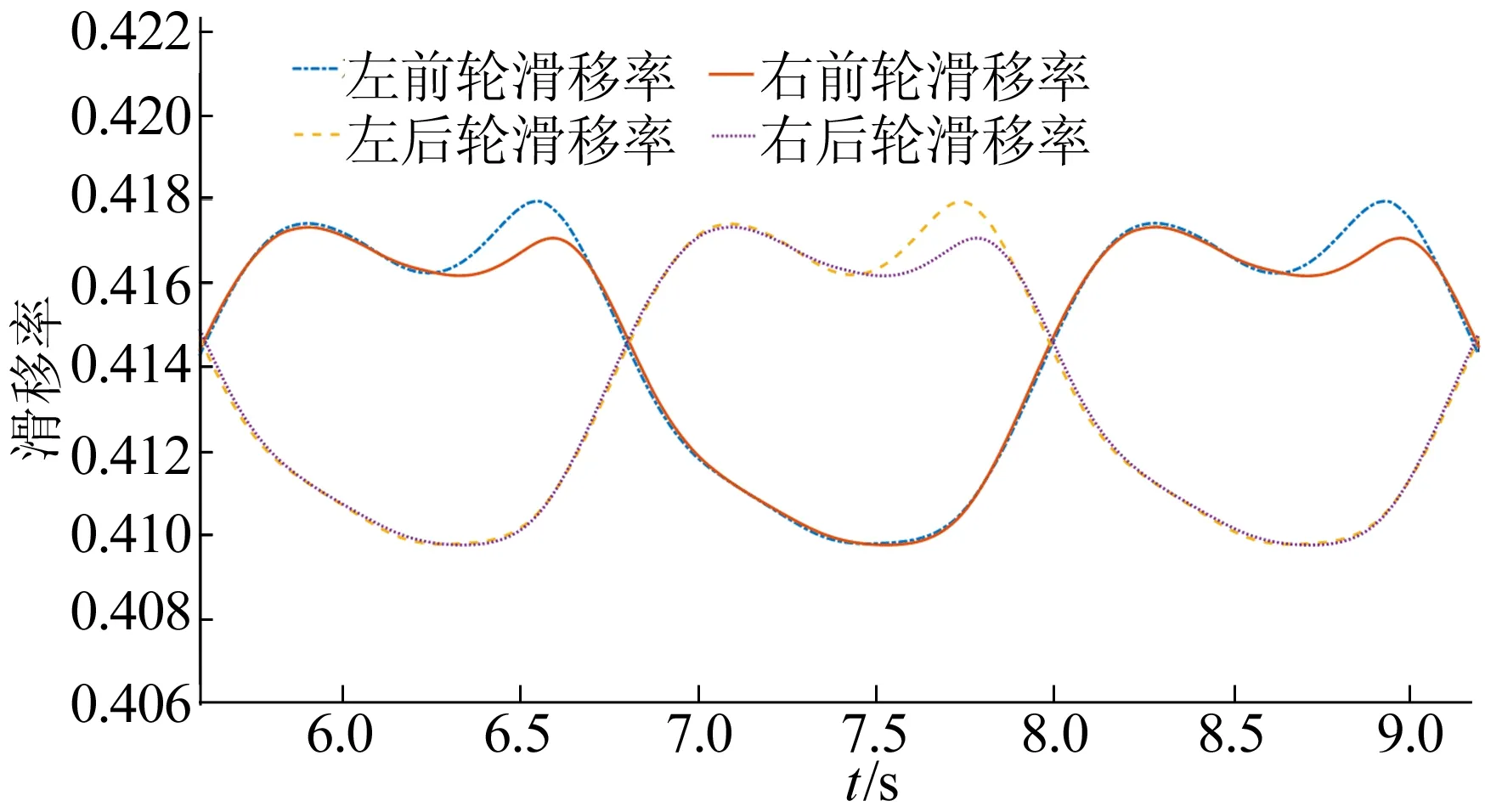
图11 蛇形试验无控制时滑移率变化部分放大

图12 蛇形试验综合控制下滑移率变化
在60 km/h时速蛇形试验中,各控制策略下路径如图13所示。
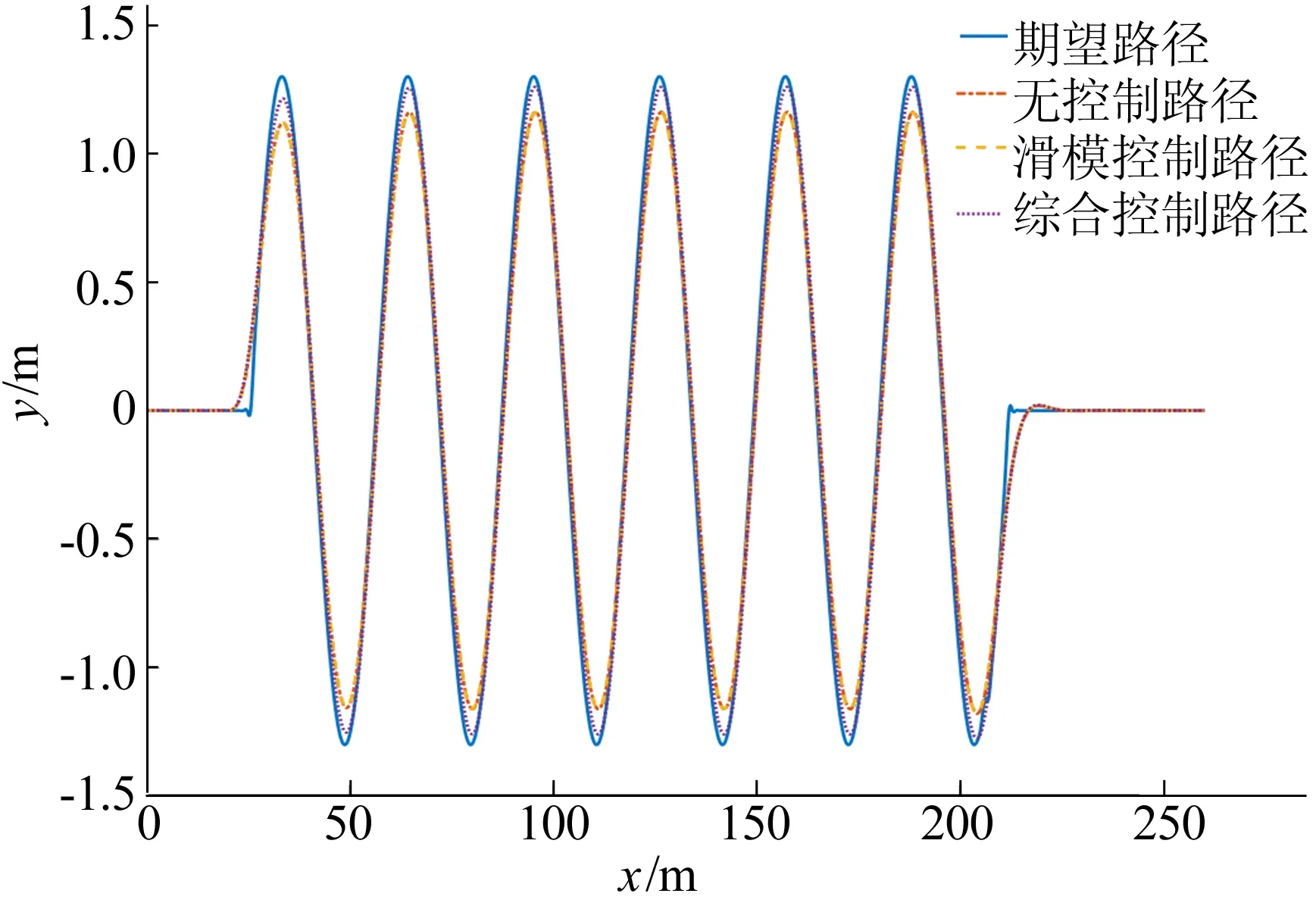
图13 蛇形试验各控制策略路径
由图5、图9可知,在移线试验和蛇形试验中,车辆理想横摆角速度由汽车线性二自由度状态方程计算得出,采用滑模控制器单独实现差动转向时,车辆横摆角速度较无控制组有大幅下降,趋于理想值;采用综合控制时,车辆横摆角速度进一步贴近理想值,在移线试验中,车辆实际横摆角速度曲线几乎与理想横摆角速度曲线重合。试验证明,本文设计的控制策略对车辆响应性、稳定性有较好提升。
由图6、图7、图10~图12可知,在移线试验和蛇形试验中,无控制时分布式电驱动整车滑移率较高,而在本文设计控制策略下,车辆滑移率得到了有效控制,车辆操纵稳定性得到了有效保证。
由图8、图13可知,在移线试验和蛇形试验中,在本文设计控制策略下,车辆路径与期望路径误差较无控制时大幅下降。其中,蛇形试验路径变化更加明显,本文设计期望路径纵向偏移为1.3 m,在无控制下的车辆路径与期望路径最大纵向误差为17 cm,综合控制下的车辆路径与期望路径最大纵向误差为8 cm,证明本文设计路径跟踪控制器有效。
5 结 论
本文首先确定了分布式电驱动整车差动转向所需差动力矩的状态空间方程,然后设计了差动转向控制器和路径跟踪控制器,确定了基于横摆角速度和期望路径的综合控制策略,并基于计算得到的差动力矩对各车轮驱动力矩进行动态分配。最后在移线试验和蛇形试验下进行了仿真试验,验证了本文提出的差动转向的有效性。
试验对比发现,经滑模控制器实现的差动转向控制策略,可通过差动力矩的计算和分配,车辆稳定性和响应性较传统线控汽车有大幅提升;而通过路径跟踪控制器补偿的前轮额外转角,使得汽车在综合控制下进一步提升了车辆的响应性和稳定性。在2个典型工况中,综合控制策略下的车辆实际横摆角速度和理想横摆角速度的误差大幅下降;综合控制策略下的车辆实际路径和期望路径误差亦得到有效控制。证明本文设计的控制策略有效提升了分布式电驱动整车在行驶时的稳定性和路径跟踪的精度。
猜你喜欢
军事文摘(2021年18期)2021-12-02
装备制造技术(2021年4期)2021-08-05
中国特种设备安全(2018年10期)2018-12-18
电站辅机(2017年3期)2018-01-31
电子制作(2017年10期)2017-04-18
金色年华(2017年13期)2017-04-04
电子制作(2017年23期)2017-02-02
红蜻蜓·低年级(2015年11期)2016-02-02
电测与仪表(2015年24期)2015-04-09
中国自行车·骑行风尚(2014年4期)2014-10-10