摆式电容倾角传感器的特性优化与数值模拟
2023-09-07 07:11王福谦
宇航计测技术 2023年4期
王福谦,殷 勇
(西南交通大学希望学院 基础部,成都 610400)
1 引言
倾角传感器是一种测量相对于水平面的倾角变化量的传感器,经常用于系统水平角度变化的测量,广泛应用于高层建筑安全监测、水库大坝安全监测、船载水平平台控制及地壳形变观测等方面。关于电容倾角传感器,文献[1]~文献[5]中的学者分别研究了双电容环结构式、四电极式、圆盘状单级式、自我标定环装式及由一个旋转轴和三对固定电极组成的圆柱-圆柱面结构式等类型的传感器;张文昭等研究了变面积型圆柱面形电容角位移传感器[6];何成平、袁峰等研究了摆式电容角位移传感器[7,8]。在以上几种传感器的研究中,均没有考虑传感器极板边缘效应对测量结果的影响,从而导致测量结果出现误差,影响测量的精确度。为了提高大地测量、高层建筑倾角测量及底盘悬挂系统倾角测量等的水平检测和倾角测量的精确度,在本文中,给出一种平板电容式倾角传感器,如图1 所示。该传感器的探头由三个长为L的平板电极组成,其中,旋转电极的宽为l1,其上端到固定点o的距离为r1,另两个夹角为Φ的固定电极的宽为l2,其上端到固定点o的距离为r2,旋转电极位于两个固定电极之间,可绕平行于固定平板电极过o点的轴转动。在测量倾角时,旋转电极因重力作用在测量过程保持其竖直位置不变,当测量的倾角θ变化时,旋转电极与两固定电极的相对位置变化,使得传感器探头的电容发生变化,即该传感器测量倾角的原理。为此,为了利用格林函数法消除传感器电极的横向边缘效应所引起的测量误差,提高电容角位移传感器的测量精确度,针对研究的电容式倾角传感器的结构,首先建立与之对应的复平面z上的二维静电场边值问题的数学模型,利用保角变换函数ζ=f(z),将z平面上的边值问题变换为位于ζ平面的上半平面的二维边值问题,由格林函数法求得ζ平面的上半平面的电势分布;再通过函数变换关系,将ζ平面的上半平面的电势分布变换为电容传感器内的电势分布,继而得到其场强分布;再积分得到传感器电极的带电量及其电容量,给出传感器的输出量C(θ)的数学表达式,利用MATLAB 软件绘制出输出特性曲线,分析传感器在不同区域的灵敏度及线性度,通过数值模拟分析给出了优化电容传感器输出性能的途径。
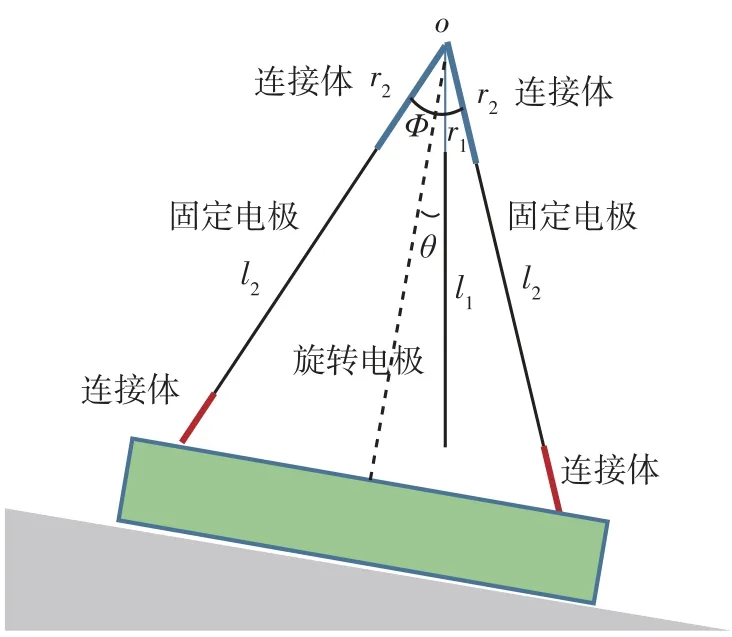
图1 摆式电容倾角传感器的实物简图Fig.1 Physical diagram of pendulous capacitive tilt sensor
2 斜平板电容器的电场和电容
为了研究计及传感器电极横向边缘效应的摆式电容倾角传感器的输出特性,首先讨论斜平板电容器的电场和电容。
2.1 斜平板电容器的电场
如图2 所示,一斜平板电容器由两块宽度分别为l1和l2、夹角为α长度为L(图2 中未体现)的极板组成,两极板横截面的延长线相交于o点,其左端到坐标原点o的距离分别为r1和r2,极板CD和AB的电势分别为U0和-U0。当极板的长度远大于其宽度时,在垂直于极板长度方向的所有截面上的电场分布均相同,故可取任一截面为z平面来讨论电势和场强在其上的分布。为了利用格林函数法计算z平面上斜平板电容器内电势的分布,可作保角变换[9]。
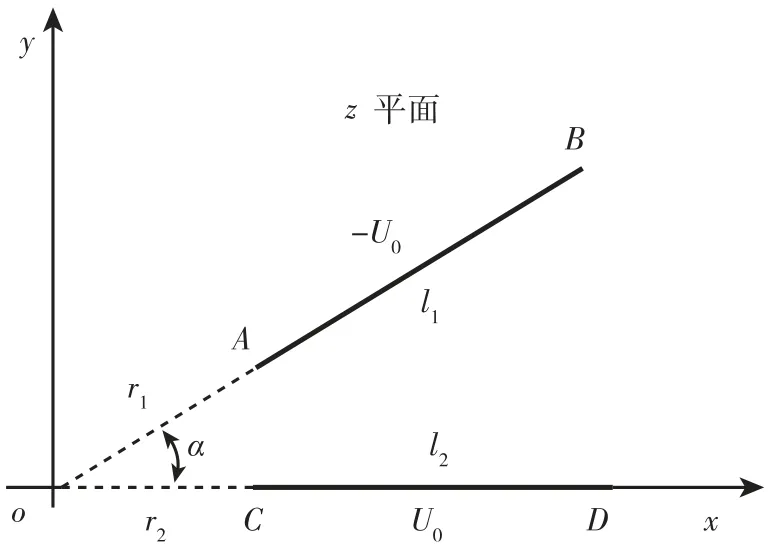
图2 斜平板电容器的横截面Fig.2 Cross section of inclined plat capacitor
经变换,z平面上由电容器极板横截面位置所限定的角域,映射为ζ平面的上半平面,如图3 所示。
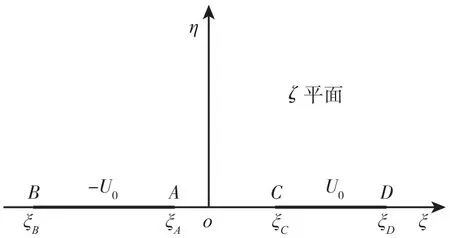
图3 变换后ζ 平面的上半平面Fig.3 Upper half plane after transformation
变换后的ζ平面上各极板横截面的位置及其端点坐标可由公式(1)确定,其中,A和C两端点的位置分别为ξA和ξC,而和D两端点的位置分别为ξB=-1 和ξD=1。
经上述变换后,z平面上的斜平行板电容器内的电势分布φ(x,y)就变换为ζ平面上的位于其上半平面的如下边值问题
对公式(2)应用格林函数法[10],可得ζ平面上的电势分布φ(ξ,η)为
为了给出变面积型平行板电容传感器内的电场分布图的直观图像,以验证本研究所得结论的正确性,用数学软件MATLAB 对其电场分布进行数值模拟[11],其电场线和等势线的分布如图4 所示,电场线与等势线及导体边界均垂直,场线分布正确,为预期结果。
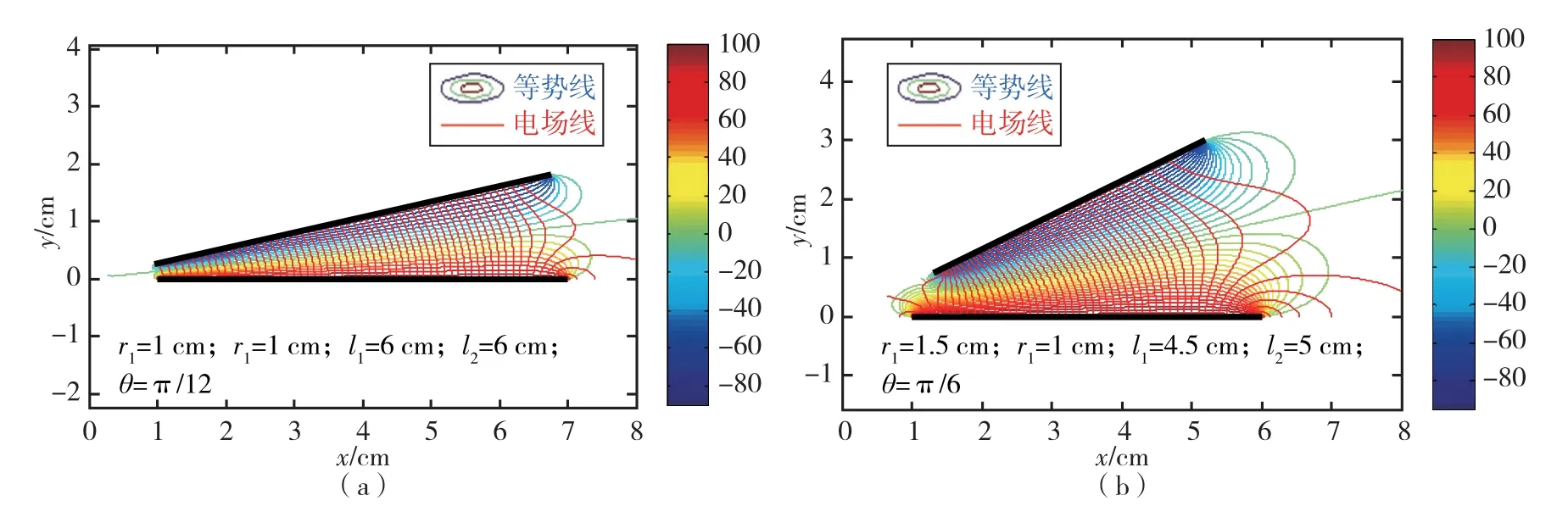
图4 斜平板电容器内的电场Fig.4 Electric field in inclined plate capacitor
2.2 斜平板电容器的电容
由场强与电势的微分关系E=-▽φ,利用公式(5)可得极板CD表面的场强分布为
则极板CD上的电荷面密度σ0为
为避免公式(7)的积分发散,可使极板AB的电势为U0,极板CD的电势为零,则极板CD上的感应电荷面密度为
斜平板电容器极板CD的带电量Q为
按公式(9)计算斜平板电容器的电容量C为
3 摆式电容倾角传感器的输出特性
3.1 输出特性
当被测平面的倾角为θ时,倾角传感器的旋转电极相对于固定电极摆过角度θ,其与两个固定电极的夹角分别为。若该传感器差动输出,由图1 中给出的传感器的几何尺寸,则根据公式(10)可得该传感器的输出特性为
由于在讨论中计及了该传感器电极的横向边缘效应,故公式(11)具有较高的精确度。
3.2 输出特性曲线
利用MATLAB[12]软件的数值模拟功能,通过公式(11)绘制出摆式电容倾角传感器的输出特性曲线,如图5 所示。
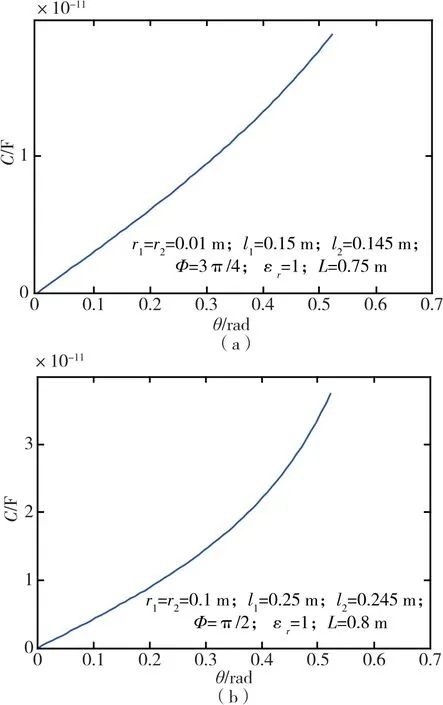
图5 摆式电容倾角传感器的输出特性曲线Fig.5 Output charactreristic cuve of pendulous capacitive tilt sensor
4 影响传感器输出特性的因素
4.1 电极面积对输出特性的影响
在该传感器的r1、r2及Φ给定时,对公式(11)通过MATLAB 软件进行数值模拟,结果表明:随着电极面积S1=l1×L和S2=l2×L的增大,该传感器的平均灵敏度提高,但其线性度均有所降低,如图6 所示。
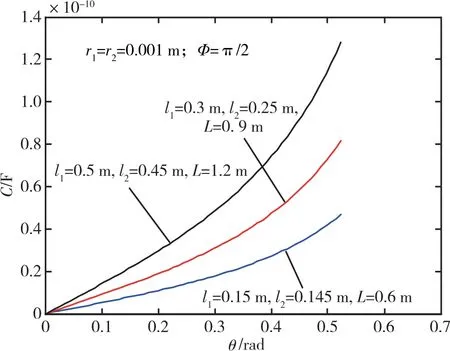
图6 电极面积对传感器输出特性的影响Fig.6 Influence of elelctrode area on output characteristics of pendulous capacitive tilt sensor
4.2 电极上端到其悬挂点距离对输出特性的影响
在该传感器的l1、l2及Φ给定时,对公式(11)通过MATLAB 软件进行数值模拟,结果表明:随着电极上端到其悬挂点距离的减小,该传感器的平均灵敏度提高,但线性度降低,如图7 所示。
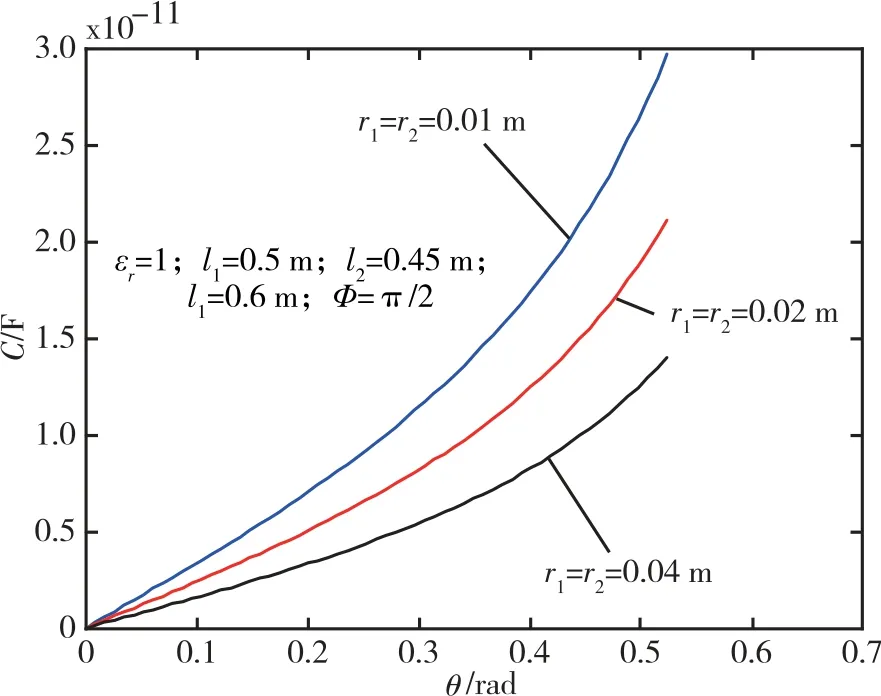
图7 电极上端到悬挂点距离对传感器输出特性的影响Fig.7 Influence of the distance from the upper end of the elelctrode to its suspension point on the output characteristics of pendulous capacitive tilt sensor
4.3 固定电极间的夹角对输出特性的影响
在该传感器的r1、r2及L给定时,对公式(11)通过MATLAB 软件进行仿真,结果表明:在测量范围一定的情况下,随着两规定电极间的夹角的减小,该传感器的平均灵敏度提高,但线性度降低,如图8 所示。
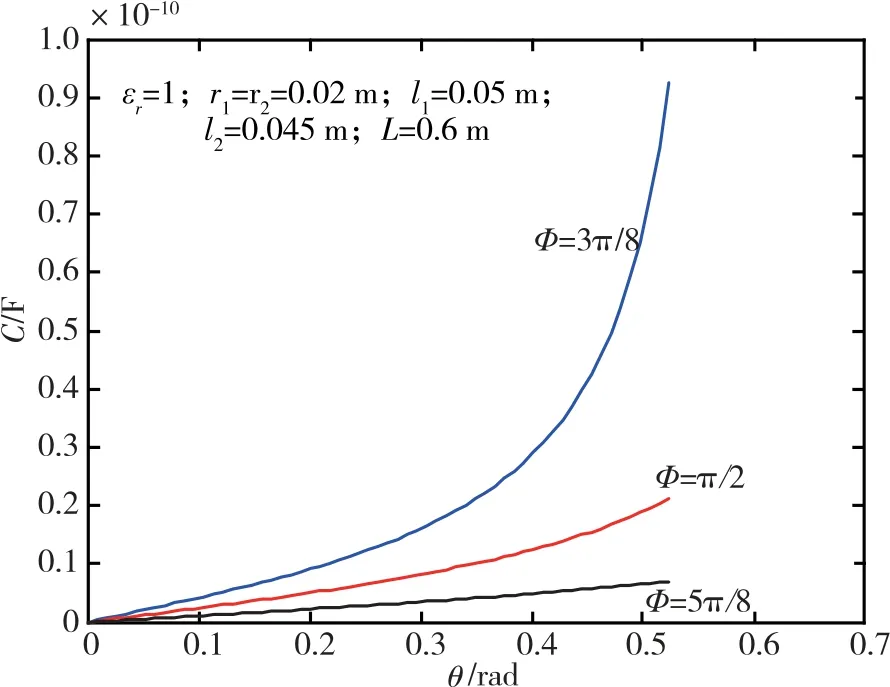
图8 固定电极间的夹角对传感器输出特性的影响Fig.8 Influence of the angle between the fixed elelctrode on the output characteristics of pendulous capacitive tilt sensor
5 传感器输出特性优化的途径
综合4.1~4.3 节中的数值模拟结果可以看出,摆式电容倾角传感器输出特性优化有三个途径:一是增大电极面积;二是减小电极上端到悬挂点或固定点的距离;三是适度增大两固定电极的夹角。通过这三个途径,选取合适的传感器几何参数,应用MATLAB 软件进行数值模拟,可看出该传感器同时具有较高的灵敏度及线性度,输出特性较好,其输出特性曲线图如图9 所示。
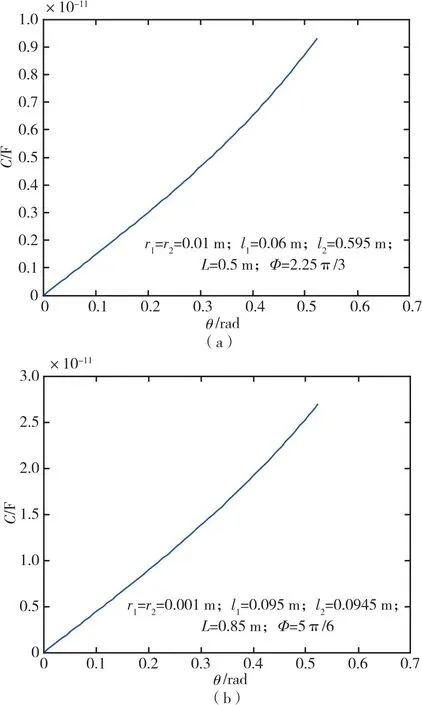
图9 优化后的摆式电容倾角传感器输出特性曲线Fig.9 Optimized output characteristic curve of pendulous capacitive tilt sensor
6 结束语
计算机数值模拟的研究方法已成为继试验研究和理论分析之外的第三种研究手段。本研究将理论分析与计算机数值模拟相结合,研究了摆式电容倾角传感器的输出特性,消除了传感器电极的横向边缘效应对测量结果的影响,从理论上指出了该传感器输出特性优化的途径,研究结论为传感器的理论设计与研究提供了一种新的方法,在科研上具有一定的理论价值,也可供相关问题研究参考。
猜你喜欢
石油管材与仪器(2020年5期)2020-11-05
机电工程技术(2018年6期)2018-08-03
电子技术与软件工程(2018年20期)2018-02-28
中学生数理化·高二版(2016年10期)2016-12-24
锻压装备与制造技术(2016年3期)2016-06-05
电测与仪表(2016年24期)2016-04-12
中国惯性技术学报(2015年1期)2015-12-19
中国光学(2015年5期)2015-12-09
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09