水下作业机械手软连接操作包
2023-09-15 09:15刘江平杨向前王沙利
机械工程师 2023年9期
刘江平,杨向前,王沙利
(1.三一重工股份有限公司,长沙 410100;2.中海油研究总院,北京 100028;3.重庆梦马致新科技有限公司,重庆 400065)
0 引言
水下机器人(ROV)作为海洋资源开发的重要工具之一,其需求也日渐增大。作业功能是水下机器人技术开发与应用的关键技术,作为作业功能主要承担者,水下机械手是大中型水下机器人的必备装置[1-4]。液压机械手是一套复杂的系统,涉及到机械、液压、材料、流体力学、自动控制、通信系统等多学科,它的性能水平直接反映了一个国家的综合工业水平[5-8]。为满足大多数作业型ROV作业需求,需要设计操作灵活的深海七功能机械手(带夹爪)。同陆地机械手相比,水下机械手长期浸泡在海水中,因此选取的相关材料必须耐腐蚀。
本文研制了一款水下作业机械手,旨在提升水下环境下重载作业的灵活性,需要研究设计具有多关节机构、液压传动、高强度且耐海水腐蚀的机械手,实现结构功能一体化设计,来满足深水应用要求[9-10]。绝大多数ROV配有水下机械手,用于主要作业。本项目所研制的作业机械手为七功能机械手,符合当前世界上大多数ROV使用需求。同时,所研制机械手具有操作简单、作业水深大、耐腐蚀、强度高及易维护等特点,产品技术达到国际领先水平[11-18]。
随着机械手技术的进步,机械手的性能不断提高,机械手的应用领域正在不断扩展。为了满足不断提高的任务复杂性、操作智能性及系统柔顺性等要求,双机械手乃至多机械手之间的协调和协同作业是机械手技术在工业环境中的推广和应用急需解决的关键技术之一[19]。目前国内水下机械手技术尚未成熟,水下作业型ROV所采用的机械手产品大都依赖进口。美国、日本、法国及俄罗斯的水下作业机械手研究和运用水平较高。典型的七功能机械手皆为6自由度带夹具的结构,其自由度配置方式和顺序大致相同,区别在于运动范围及动作能力[20]。
通过本项目的成功研制,实现水下作业机械手的国产化,同时将机械手以操作包模块的方式应用到水下作业,该技术的掌控将打破国外多年来的技术封锁和产品垄断,逐步实现我国海洋油气资源装备开发的完全自主化,为我国海洋油气资源的安全开发提供保障。
1 结构设计
1.1 设计指标
水下作业机械手是完成水下作业的最理想设备,它可以模拟人的手臂在一般潜水技术无法达到的深度进行综合考察和研究,并完成多种作业。本项目所研制的机械手对标FMC T4机械手,处于国际领先水平,技术成熟。该机械手采用内置油路,整个机械手只有一进一出2根油管,极大地减轻了设备质量,且避免了软管缠绕的操作风险。另外,该机械手采用内置控制模块,精简了整体结构,使得其能在小体积情况下,提供大承载力和操作转矩。为了方便平台操作,配合长液压缸臂架设计了水下操作包,可以模拟实现水下ROV的部分功能,实现对浅水装置观察和操作。水下操作包的主要参数如表1所示。

表1 水下操作包主要参数
1.2 结构设计
水下操作包主要由七功能机械手、五功能机械手、上下补偿装置、照明灯与摄像头、减速机组件、蓄能器、晃动与旋转关节、锁定缸、控制箱和安装架等组成,其总体结构组成如图1所示。

图1 水下作业机械手软连接结构组成
1.2.1 水下作业机械手
水下软连接操作包配备有五功能和七功能作业机械手各1套。七功能机械手主要由基座、肩部、上臂、关节、前臂、腕部和夹爪组成。与七功能相比,五功能机械手精简了腕部的上下翻转和左右翻转功能。七功能机械手结构如图2所示,五功能机械手如图3所示,两种机械手的主要性能参数如表2所示。

图2 七功能机械手结构

图3 五功能机械手结构
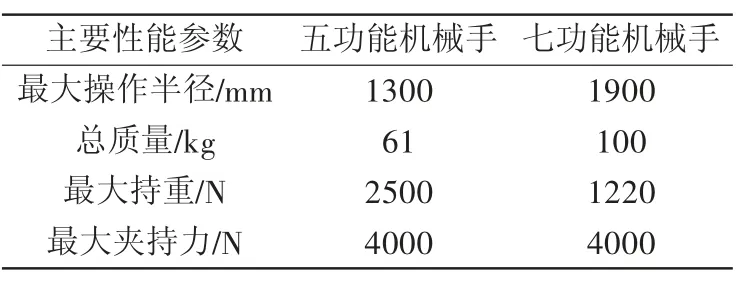
表2 机械手主要性能参数表
七功能机械手实现主要的作业操作,功能及操作范围广,可以在较为复杂的区域实现操作;五功能机械手主要用来固定七功能机械手基座,减少外部晃动对作业的影响,同时其抓紧力大,可以用来移动较重的物体,二者相互配合,形成互补。
1.2.2 上下补偿装置
上下补偿装置主要由外臂、内臂和液压缸组成。其中外臂连接对接法兰,内臂连接旋转关节。内外臂通过液压缸相连。液压缸活塞杆端连接蓄能器,由蓄能器提供上下补偿的力。活塞端连接伺服阀,可以通过打压调节上下位置,实现操作包的微调操作。水下补偿装置结构如图4所示,其主要参数如表3所示。软连接下端质量为473 kg,液压缸最大作用力为22 000 N,足够承受竖直方向上4.7倍重力加速度的冲击。

图4 上下补偿装置

表3 上下补偿装置主要性能参数表
1.2.3 照明灯与摄像头
摄像机是一款面向水下机器人、水下监控等领域专门设计的深水摄像机。摄像机采用低光照星光级CMOS传感器,高达300万像素,性能稳定可靠。窗口选用高透光率复合材料透镜,成像效果更佳。水下照明灯为四合一型,即4 个 灯 共 用1 组线。线缆长度为88 m,直接连接平台控制中心,由平台进行控制,其布置示意如图5所示。

图5 照明灯与摄像头布置示意图
1.2.4 减速机组件
减速机组件为安装架的旋转提供动力,配置有一个OMM 50液压马达和定制1:30减速机,安装在一个长度为540 mm的滑轨上,可满足上下补偿装置400 mm的行程范围。减速机输出轴通过万向轴连接旋转关节,其结构如图6所示。

图6 减速机组件结构图
1.2.5 晃动与旋转关节
晃动与旋转关节主要由球座、球关节、固定块、滑块、锁定球和锁定液压缸组成,可实现操作包±20°晃动和±180°旋转。锁定球上有锁定槽,可通过液压缸推动锁定球到槽内完成晃动锁定,其结构如图7所示。

图7 晃动与旋转关节结构图
1.2.6 控制箱
控制箱主要由防水壳、控制模块、电磁阀、伺服阀和阀板等组成。通过螺栓和框架固定在一起。控制箱可实现五功能机械手的操作、上下补偿控制、操作包旋转和旋转关节锁定等功能。七功能机械手自带控制模块,控制箱仅提供接线箱的功能,其布置如图8所示。

图8 控制箱布置图
2 工作模块
2.1 水下作业模块
本软连接操作包安装五功能和七功能水下作业机械手,水下作业时一个夹持,另一个操作,既消除了操作包的晃动对作业的影响,又扩大了操作包的作业范围。同时选择五功能和七功能机械手,有效降低整体控制复杂程度,减轻操作包的质量,二者相互配合,形成互补,更加经济适用。
机械手固定在安装架上,安装架顶部设置有软连接调节机构,包含升降驱动组件、旋转驱动组件和下放应力消除组件,既能用于与水下作业机械手操作包下放和上提的整体升降系统连接,又能微调水下作业机械手操作包的位置和姿态。
2.2 位置调整模块
升降驱动主要通过上下补偿装置来实现的,其外臂上端与基座固定,内臂基座通过晃动与旋转关节连接,升降液压缸的缸体安装在前臂上,活塞杆与内臂基座相连,通过升降液压缸活塞杆的伸缩调节上下补偿装置的长度,从而调整操作包安装架的上下位置。
旋转驱动主要通过减速机组件和晃动与旋转关机来实现,减速机组件安装在前臂滑轨上,升降驱动装置和下放应力消除组件的位置变化对旋转驱动装置不会造成影响。减速机组件通过万向轴连接晃动与旋转关节,液压马达驱动通过蜗杆减速机传递到万向轴,带动晃动与旋转关节内部球关节和安装架旋转,从而调整操作包安装架的圆周运动。
球关节上开设有一环形凹槽,其中心轴线与转动轴线重合。球座沿圆周方向分布有至少3个沿径向贯穿的锁定球引导孔,该孔的内端均正对环槽,孔中配置有锁定球;球座的外周面上配置锁定液压缸,分别与引导孔一一对应,各锁定液压缸的活塞杆分别向内插入对应的孔中,当液压缸的活塞杆将对应的锁定球顶入环槽时,各锁定球均部分位于环槽中,部分位于引导孔中,以使球关节只能沿上连接轴的转动轴线转动。采用以上结构,在水下作业机械臂操作包下放到位以后,能够通过各锁定液压缸将球体锁定为绝对水平的姿态,即将下放的安装架和机械手锁定为绝对水平的姿态,确保机械手后续作业的精确可控。
2.3 应力消除模块
应力消除组件主要包括升降驱动装置、万向传动机构和晃动与旋转关节。主轴、万向轴和上连接轴组成多连杆结构,配合滑轨和滑块,使升降驱动组件能够通过球座带动安装架升降,使旋转驱动组件的主轴能够通过万向轴和支撑球带动安装架旋转,使安装架承受应力变化时,能够通过球座自适应地进行晃动,消除应力,实现软连接。
在操作包下放和回收的过程中,通过下放应力消除组件自适应地相对主轴进行晃动,从而实现安装架与主轴的软连接,进而能够完全自适应地消除海水对水下作业机械手操作包各部分产生的应力,有效保护水下作业机械手操作包,避免水下作业机械手操作包出现损坏。同时,连接件安装有与升降液压缸的油路连通的蓄能器,当升降液压缸油路的瞬间压力增大时,蓄能器可以吸收这部分能量,起到很好的缓冲作用,以保证升降液压缸的稳定运行。
3 联合调试
该水下作业机械手软连接操作包用在三一泵送公司75 m水下机械臂末端,用于水下作业。最大作业深度为55 m,可以完全替代水下深潜器进行油气田水下生产系统作业,也可拓展应用在船舶水下检修、大坝水下检修、海底电缆油管检修、水下打捞和救援等众多领域,具有较为广泛的水下作业用途。
现场进行陆上模拟安装调试,对于软连接操作包,只需机械臂端提供压力为20 MPa一进一出的液压回路,通过软连接操作包控制系统即可完成水下作业、位置调整、应力消除等功能,如图9所示。经过现场联合调试,水下机械臂与机械手软连接操作包陆地操作配合默契,软连接操作包各功能模块能正常运行,符合前期设计需求,目前计划在渤海海域进行水下调试。

图9 现场联合调试
4 结论
本文介绍了一款水下作业机械手软连接操作包,不仅具备升降和旋转调节的功能,应对更加复杂恶劣的工作环境,还通过增设下放应力消除组件,使安装架在主轴的驱动下旋转,同时在下放和回收过程中,通过下放应力消除组件自适应地相对主轴进行晃动,从而实现安装架与主轴的软连接,能完全自适应地消除海水对水下作业机械手操作包各部分产生的应力,有效避免水下作业机械手操作包出现损坏。经过和三一水下机械臂联合调试,基本达到水下作业要求,为避免采油作业关键设备被国外卡脖子做出了贡献,有效防范国外就采油水下深潜器对我国的出口限制。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
新能源科技(2022年8期)2022-11-22
山东冶金(2022年1期)2022-04-19
新能源科技(2021年12期)2021-04-02
珠江水运(2016年21期)2016-12-08
山东工业技术(2016年15期)2016-12-01
通信电源技术(2016年1期)2016-04-16
设备管理与维修(2016年7期)2016-04-09
中国修船(2015年5期)2015-11-25
筑路机械与施工机械化(2015年11期)2015-07-01