像教育人一样教育机器
2023-09-18 12:17刘凯贾敏孙常新马玉慧王伟军
电化教育研究 2023年9期
刘凯 贾敏 孙常新 马玉慧 王伟军

[摘 要] 人工智能分为专用与通用两个分支,二者皆可与教育融合,但前者关注如何用人工智能手段解决教育问题,如智慧教育;后者却反向聚焦怎样用教育手段解决人工智能问题,如机器教育。既有研究已实证后者的必要性与可能性,本研究则通过实验探索人类教育经验对通用人工智能系统学习效果的影响,尝试验证“机器教育”的有效性。实验自变量来自人类教学过程的四类重要影响因素,分别是教学目标、教学内容、教学节奏和教学空间。结果发现,通用人工智能系统对教学目标的激活频率、教学内容的正确率、教学节奏的时间间隔以及教学空间的大小等指标具有与人类学习者高度相似的敏感性,都可由教学参数的调整而获得更好的学习效果。因此,人类教育经验同样可推广至通用人工智能系统。对“人机兼容”客观教育规律的确证,不仅用科学证据有力地回击了对教育理论科学性的质疑,亦有望实现教育学对人工智能研究的逆向反哺。
[关键词] 通用人工智能; 机器教育; 教学原则; 学习效果; AGI
[中图分类号] G434 [文献标志码] A
[作者简介] 刘凯(1981—),男,山西晋城人。副教授,博士,主要从事通用人工智能、机器教育、精神病理学、认知图谱等研究。E-mail:ccnulk@ccnu.edu.cn。
一、引 言
人工智能具有专用和通用两种不同取向,分别对应专用人工智能(Special-purpose AI,SAI)与通用人工智能(Artificial General Intelligence,AGI)。由于研究目的各异,二者具有完全不同的理论框架和技术路线。专用人工智能通过预设算法解决特定领域问题,目前,学术界与实业界中“人工智能”一词的内涵几乎等同于专用人工智能。通用人工智能则致力于研发先天的元学习能力,并借助后天教育经验获得特定问题的满意解。
尽管专用人工智能和通用人工智能都可与教育融合而发挥重要作用,但作用机理却各不相同:前者类似“物理作用”,后者则类似“化学作用”。在“物理作用”下,传统的教育时空阻隔被打破,彰显出专用技术的工具优势,如MOOC、智慧教室、智能导学系统等。在“化学作用”下,教与学的角色加入了能思考、有情感的通用人工智能系统,这拓宽了教育的边界,丰富了教育的内涵,并向学界展现出一处有着巨大挖掘潜力的学科“宝藏”。实际上,人类与机器共通的教育现象蕴含的新问题、新领域亟待探索[1],有助于从交叉学科视角下发展“能够直面现实”的原创性基础理论[2]。例如,对话效果惊艳的ChatGPT系统,其成功并非来自技术突破,而是人类反馈强化学习中引入的人因干预手段对机器训练模型发挥了重要作用——让人“教育”机器[3]。
与专用人工智能赋能人类教学的“正向”路线不同,既有研究证实了人类教学经验“反向”赋能通用人工智能的可能性[4]。然而,可能性不等于有效性,可以被教育并不意味着人类教育经验对通用人工智能系统的学习效果也必然具有积极影响。因此,本研究尝试回答“有效性”问题:人类教学经验能否切实提升通用人工智能系统的学习效果?若结果为真,便说明人类教育规律既适用于人类也适用于机器。“人机兼容”客观规律的存在与发现,不仅能为教育科学提供可重复且可证伪的科学证据,亦有望逆向反哺人工智能的相关研究。
二、通用人工智能及OpenNARS系统
近年来,通用人工智能研究热度持续攀升,智能的理智主义研究路线备受学界关注[5]。非公理逻辑推理系统(Non-Axiomatic Reasoning System,NARS)逐渐成为通用人工智能学界的重要代表,其开源项目OpenNARS具有较为完备的理论基础。作为自治和发展型的人工认知系统,该系统有三个重要特征:一是通过多模态输入通道感知外部世界,并以运动形式经由输出通道作用于外部世界,从而在交互中表现出对环境的主动适应性;二是利用个体经验进行推理,可基于最佳竞争证据作出决策;三是可接纳并处理冲突性的目标和经验,能够对不确定条件进行实时响应,及时给出“合理解”[6]。虽然OpenNARS的学习能力是先天预设的,但学习内容却需要从后天获得。OpenNARS像极了人类婴儿——需要陪伴和养育才能成长,而养育的目标则是通过经验积累以保障系统完整性及功能运转正常(如维持电量)。
不論人类婴儿还是机器婴儿,感觉和运动都是智能主体获取经验的基本途径,二者相互促进,在后天学习中具有决定性作用。若想借助通用人工智能系统的学习行为探索机器教育的内在规律,就必然涉及系统与外部世界互动中的感觉和运动处理。其中,感觉的发展是主动学习的前提条件,动作的发展则经历反射及辐射的阶段性,亦促进了智能主体的认知发展[7]。通用人工智能系统的具身设备是其感觉和运动能力发展的原材料,虽然它的器官跟人类完全不同,但感觉和运动经验的建构原理却与人类毫无二致。
OpenNARS的感觉、运动交互涉及一系列内部处理过程:首先,由各类传感器对外部环境信息进行捕捉和提取。其次,围绕目标系统处理信息,根据实际需求及推理结果发出移动指令。最后,通过传感器反馈信息对移动指令的效果进行重评,并基于可供性对有用经验进行整合与存储。系统依靠内在的SELF(自我)机制实现对感觉和运动信息的整合。SELF是一个特殊的系统变量,不仅与内部心智操作有关,还是外部信息与内部经验的语义交汇枢纽。外部传入的感觉信息与内部发出的移动指令都采用纳思语(Narsese)这一系统内语言进行统一的形式化表征,二者以SELF可供性的主观价值判断为中介建立经验联结,再通过后续学习过程增强或减弱联结的强度。于是,当特定的感觉信息再次出现时,OpenNARS便能够主动激活相应的移动指令作为动作输出。或者,当执行特定的动作输出时,系统便能主动预期特定感觉的出现[8]。
三、问题的提出
机器教育的可能性已得到证实,说明人类教育经验也能够对通用人工智能系统的学习过程产生影响,但是,这种影响的取向仍不得而知。因此,需要对机器教育的有效性进行验证,探究其是否具有积极的促进作用。然而,可能性与有效性的判别方式不同,前者可采用内源性判据,后者却必须使用外源性判据。验证有效性只能以主体的外部行为作判据,通过对通用人工智能系统行为的表现间接评价教育干预的效果。本研究创设了简洁而直观的运动避障任务:运动有利于提升安全值,撞到障碍物会降低安全值,OpenNARS需要学习在保持积极运动状态的同时避免碰撞。
不過,通用人工智能系统只是具备认知功能、可以学习和推理的软件“大脑”。唯有为其加装感觉、运动“器官”后,运动避障任务才能在“身心一体”的意义下真正实现。事实上,通用人工智能系统的发展也和人类婴儿一样,高度依赖自身感觉、运动设备来获取具身经验。不同的是,通用人工智能系统的感觉、运动“器官”的种类和形态可以多种多样。但从理论层面看,为完成运动避障任务,训练人形或轮式机器人并无实质区别。换言之,究竟装配步足、履带还是车轮等运动“器官”,只是系统的“感觉”各异,却非“移动”的原理有别[9]。因此,为便于实验操作,本研究将OpenNARS的身体设定为汽车形态,使其拥有两端测距的“感觉”能力及左右移动的“运动”能力。在“智能避障”二维虚拟场景下,将其避障行为作为人类教学原则干预下OpenNARS学习效果的测评指标。
鉴于一般教学过程总涉及教学目标、教学内容、教学实施及教学空间四个方面,本研究将根据实验目的从中拣选典型、易测且有实证依据的人类教学原则作为研究变量。首先,教学目标体现了学生学习的动力朝向。现有教学原则特别强调学生的“自主性”[10-11],这需要学生将学习目标保持在一定的激活水平上。其次,教学内容直接影响学习效果的优劣,“做示范,给样例”[12]的教学原则要求教学内容需提供适宜的经验示例以更好地促进学习。第三,教学节奏是教学实施过程中的重要因素。“给学习者一定时间进行认知处理,以使学习者内化所学概念”[13]及“节奏效应”[14]等教学原则申明教学过程不能一味灌输知识,要留给学习者适当的时间思考和消化,这有赖于教师对时间间隔的把控。第四,教学空间对学习效果亦有一定影响。“可管理的认知负荷”[14]教学原则指出,教学空间的适度反馈能对学习起促进作用,但超负荷的环境反馈却适得其反。
本研究以通用人工智能系统OpenNARS及其直接操控的虚拟小车作为实验对象,以小车完成避障任务的学习效果作为实验因变量,并选择教学目标、教学内容、教学节奏以及教学空间的可操作性因素作为实验自变量。基于研究目的及变量分析,提出如下研究假设:
假设1:持续的教学目标能够提升通用人工智能系统的学习效果;
假设2:适宜的教学内容能够提升通用人工智能系统的学习效果;
假设3:适合的教学节奏能够提升通用人工智能系统的学习效果;
假设4:适度的教学空间能够提升通用人工智能系统的学习效果。
四、实验设计
(一)实验环境
本研究的实验对象为OpenNARS,版本号3.0.4①。为避免实体机器人的惯性测量偏差以及不可控因素的随机侵扰,最终采用“智能避障”虚拟场景作为实验环境。
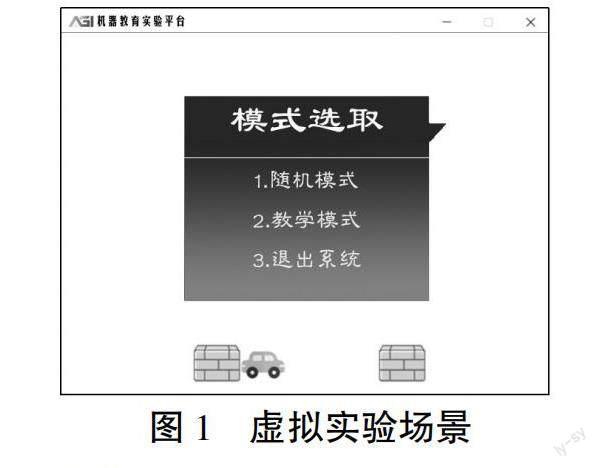
1. 场景设置
“智能避障”场景的基本元素包括左、右两处固定障碍物,以及一辆可由实验人员或OpenNARS控制运动的虚拟“小车”(如图1所示)。为便于实验观测与统计,三类基本元素的宽度及小车单次移动距离皆设置为50px,并将其定义为单位长度。除可见元素外,小车左右两侧分别配有“雷达”传感器,用于测量小车与两侧障碍物的实时距离,并将距离的变化信息即时反馈给OpenNARS。
本研究将小车与障碍物之间距离为0px时的位置定义为临界点。故存在左、右两个临界点,代表即将碰撞又恰好未撞之处。当小车处于临界点时,继续向障碍物方向移动便会“撞墙”,导致避障失败,安全值降低;反之,小车朝相反方向移动则为避障成功。因无需考虑碰撞造成的损毁情况,故小车在“撞墙”后实际位置保持不变,仍停留在临界处等待后续指令。
2. 模式选择
由于OpenNARS系统并未预置任何先验知识,启动后若无外部刺激输入,它将一直处于“大脑空转”的静默态,没有输出也没有动作。因此,实验开始后,小车需要从外部接受移动指令才能激活感觉和运动系统并进行推理学习。该阶段被称为“教学引导阶段”,是教育干预发挥作用的关键窗口期。随后,进入“自主行为阶段”,小车将根据自身学习经验而产生自主移动指令。在教学引导阶段,不同的训练模式对应具有不同性质的外部移动指令。其中,“随机模式”的移动指令序列由电脑随机生成,“教学模式”的移动指令序列则由人工预先编制。在实验开始前,需先从菜单中选择相应的训练模式。
3. 交互接口
为实现OpenNARS与虚拟环境的持续交互及行为反馈,课题组开发了模块接口,将小车的感觉信息和移动指令与纳思语进行双向转译。同时,这也是实验者对OpenNARS“大脑活动”的内部信息进行判别和记录的观察窗口。
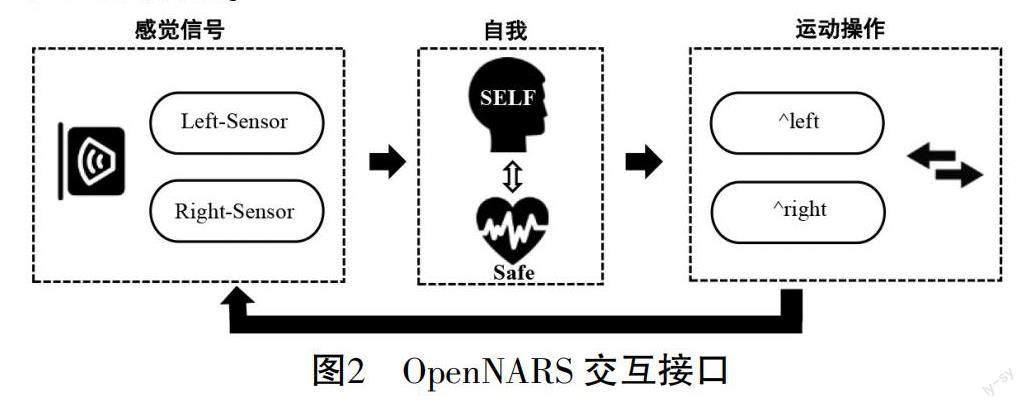
接口传输的具体信息包括感觉信息、运动信息以及系统目标三类。其中,感觉信息由小车左右两个传感器{lsensor}和{rsensor}产生,并与SELF建立联结:“< SELF —> {lsensor}>.” “< SELF —> {rsensor}>.”。这能让OpenNARS在主观上知晓自身有两个感觉“器官”。运动信息为OpenNARS先天预置的左右移动指令:^left与^right,类似人类婴儿的先天反射。系统输入的原初目标为“< SELF —> [safe] >.”,目的是维持自身的安全状态。
当实验开始后,接口模块负责持续监听传感器产生的距离信息,将其组装成合法纳思语后单向送入OpenNARS,例如:“< {lsensor} —> [50] >.”。同时,接口模块也持续监听系统内部的输出操作,从输出信息流中筛选并提取由SELF发出的运动信息,再将其转写为虚拟环境中小车的移动指令。小车的后续移动又反过来引发感觉信号的变化,如此循环往复。当小车“撞墙”时,安全值([safe])会降低,远离了目标的达成(如图2所示)。最为重要的是,此时距离感觉便会与相应的移动指令建立联系,共同为本次目标受损提供基于经验的语义解释,这也是系统可供性的经验落脚点。一切加工推理的過程都围绕SELF进行,感觉与运动对目标的影响不断累积和强化而成为SELF习得的重要成果,最终展现出“实时性”“主观性”“建构性”的特点。
(二)自变量
本实验自变量涉及教育过程的四类基本因素:教学目标(G)、教学内容(C)、教学节奏(R)以及教学空间(S)(如图3所示)。
1. 教学目标
教学目标(G)是课堂活动的出发点和落脚点,也是教学评价的重要指标。教学目标不仅影响教学过程的实施,很大程度上也决定着学习效果的好坏。本研究中,教学目标的内容保持不变,变化的是教学目标的传输频率,对应于学习过程的动机激活水平。换言之,传入的教学目标频率越高,OpenNARS参与避障任务的动机水平越高。为探究不同教学目标传输频率下OpenNARS在避障任务中的学习效果,本研究将教学目标自变量设置为四个水平,按照频率由高至低分别是:①“仅首次”(G1);②“1秒/次”(G2);③“5秒/次”(G3);④“10秒/次”(G4)。其中,“仅首次”(G1)为极端情况,仅在系统开始时传入一次教学目标。
2. 教学内容
教学内容(C)直接影响学习效果的优劣,许多教学原则均强调示例的重要性。通常情况下,符合教学目标的正确教学示例有助于学习效果的提高,但错误的教学示例会阻碍或延误对知识的掌握。对OpenNARS而言,意味着教学引导阶段性质不同的移动指令序列可能会导致差异化的学习效果。为研究不同教学内容对OpenNARS智能避障任务学习效果的影响,本研究将教学内容自变量设置为三个水平:①由正确的避障指令序列构成(C1);②由错误的避障指令序列构成(C2);③由正确与错误随机组合的避障指令序列构成(C3)。
3. 教学节奏
教学节奏(R)是人类教师在教学实施过程中为实现教学目标而广为使用的时间控制手段,体现着教与学的交互性和协调性。特别是,教学节奏形成的适当间隔有利于学生思考和建立新旧知识间的联接,对知识的吸收内化有促进作用。本研究中,教学节奏对应于教学引导阶段外部指令输入的固定间隔时间,间隔时间越长,OpenNARS对新指令的“思考”(推理时间)就越充分,学习效果可能会更好。因此,根据实验环境的基本参数设定,本研究将教学节奏自变量设置为四个水平:①间隔时间1秒(R1);②间隔时间2秒(R2);③间隔时间3秒(R3);④间隔时间4秒(R4)。
4. 教学空间
教学空间(S)是开展教学活动的实际场所,既可以是物理空间,也可以是虚拟空间。对于人类学习者而言,教学空间默认为物理空间。良好的学习行为离不开适合教学空间的支撑,运动技能训练尤其如此,不同运动项目的学习需要与之相匹配的练习场地。本研究中,教学空间为小车运动空间的宽幅,空间越大,感知运动信息就越多,同时也意味着更低的“目标—资源”比,对OpenNARS学习过程的认知负荷提出更大挑战。由于车长及每次移动距离均为1个单位长度,故将教学空间自变量设置为三个水平:①3个单位长度(S1);②5个单位长度(S2);③7个单位长度(S3)。
(三)因变量
实验过程中需要测量的行为指标包括三个部分:(1)实验全程的耗时、小车的运动过程及结果;(2)教学引导阶段内小车的运动过程及结果;(3)自主行为阶段内小车的运动过程及结果。
所有实验的因变量均保持一致,为评测OpenNARS在避障任务中的学习效果,用连续运动下对两侧障碍物躲避行为的激活率和成功率来标识,并以成功率为主要评判指标。为抵消实验的偶然性偏差,每项实验需重复进行30轮次,逐次记录并统计各项实验的激活率与成功率。
(四)实验流程
在教学引导阶段,尝试通过人工移动指令的引导促进OpenNARS对感觉运动信息的学习,并将其作为自主行为阶段OpenNARS对小车发出内部移动指令的经验基础,进而观察整个过程中任务的完成情况以确定OpenNARS的学习效果。具体流程设计如下:实验开始前,当自变量为“教学目标”“教学节奏”“教学空间”以及“教学内容”的“全部正确序列”和“全部错误序列”水平时,按照自变量的不同水平设定软件参数后,选择“教学模式”开始实验;当自变量为“教学内容”的“随机序列”水平时,选择“随机模式”开始实验。实验开始后,先进入教学引导阶段,随后进入自主行为阶段,观察记录两阶段中OpenNARS执行避障任务的行为指标值。每项实验重复30次,待实验结束后,对数据进行整理分析,统计各自变量在多水平下的激活率和成功率及其差异显著性。
五、实验结果
(一)实验一:持续的教学目标对通用人工智能系统学习效果的影响
教学目标激活频率的强度体现了学习者在学习过程中的动机水平。从实验一的结果(如图4所示)可知,教学目标激活频率的不同水平对应不同的学习效果,且所有组间差异检验均显著(p激活率 < 0.001,p成功率 < 0.001)。从“1秒/次”(激活率=76.33%,成功率=73.33%)到“10秒/次”(激活率=16.66%,成功率=0%)可以看出,随着教学目标激活频率的逐步降低,OpenNARS的激活率和成功率随之骤降。这意味着教学目标的保持或提醒对学习效果有极大影响。甚至“仅首次”这种只输入一次目标的极端情况,教学引导阶段后所有重复实验均无法激活OpenNARS。由此,持续目标的重要性可见一斑,说明对教学目标的反复强调能更好地促进OpenNARS的学习效果。因此,假设1成立。
(二)实验二:适宜的教育内容对通用人工智能系统学习效果的影响
教育内容是指教学引导阶段为OpenNARS输入的正确、错误和随机三类移动指令序列。实验结果(如图5所示)表明,初始经验对OpenNARS学习的最终效果至关重要,组间差异显著(p激活率 < 0.001,p成功率 < 0.001)亦可说明不同教学内容对学习效果的影响各异:当教学内容全部为“正确指令序列”时,其激活率(76.33%)和成功率(73.33%)差异不大,都远高于“错误指令序列”的激活率(6.66%)和成功率(0%)。当教学内容为“随机指令序列”时,教学内容同时包含正确和错误的指令序列,但其激活率(20.00%)和成功率(10.00%)并非处于“正确指令序列”与“错误指令序列”的正中间,而是更接近“错误指令序列”的效果。由此可见,正确的教学内容不仅具有更好的针对性,而且对提升学习者的学习效果也起到关键作用。因此,假设2成立。
(三)实验三:适合的教学节奏对通用人工智能系统学习效果的影响
教学节奏意在借助不同的教学间隔时间探查OpenNARS对感觉运动信息进行学习的效果。由实验结果(如图6所示)可知,“1秒”间隔时间过短,此种情况下OpenNARS拥有最低的激活率(50.00%)和成功率(43.33%)。但当间隔时间增至“3秒”时,激活率(96.66%)和成功率(83.33%)升至最高点。但当间隔时间继续增加到“4秒”时,激活率和成功率却又分别降至90.00%和76.66%。各个组间的差异检验结果均显著(p激活率 < 0.001,p成功率 < 0.001)。很显然,OpenNARS学习效果并非间隔时间越短越好,也绝非间隔时间越长越好——只有给予充足却不冗余的“思考”时间才能促使经验信息被更好地内化和吸收。由此可见,教学节奏“人—机”通用,尺度的把握具有“艺术性”,需要视教学对象与教学内容的差异而定。故而,假设3成立。
(四)实验四:适度的教学空间对通用人工智能系统学习效果的影响
教学空间的实验结果体现了环境对OpenNARS学习的潜在影响。随着宽度的增加,成功实现“避障”的方式也在增多:除临界位置的“转向”之外,非临界位置间的往返也是一种成功。由实验结果(如图7所示)可知,当教学空间水平为“3个单位长度”时,OpenNARS拥有最好的学习效果;当教学空间水平扩展至“5个单位长度”甚至“7个单位长度”时,随着运动空间的增加,学习效果不升反降,而且激活率与成功率之间的差值从4.34%到16.67%再到47.63%,呈现出加速扩大的情况。组间差异检验结果显示,激活率无显著差异(p激活率 > 0.05),但成功率却差异显著(p成功率 < 0.05)。换言之,三种不同空间水平的学习效果差别明显,3个单位长度的空间成为本任务的最佳教学空间,并且3个及以上单位长度的教学空间均可激活OpenNARS。因此,假设4成立。
六、研究结论与讨论
根据上述实验结果,本研究可得出如下结论:
(一)持续的教学目标能够提升通用人工智能系统的学习效果
当教学目标的传输频率为“仅首次”时,OpenNARS处于“植物”状态,思维活动匮乏,无法产生学习行为。当传输频率处于“1秒/次”水平时,任务执行效果最佳,可见通过教育手段持续激活教学目标能有效提升OpenNARS的学习效果。人类学习者具有天然的动机系统,最佳动机水平理论表明动机不足或过分强烈都会影响学习效率,人类最佳动机水平与行为效率之间的关联呈倒U型曲线[15]。在实验一中,该曲线也同样出现在通用人工智能系统的行为表现之中,从而再次印证了通用人工智能系统和人类认知层面上的相似性。
(二)适宜的教学内容能够提升通用人工智能系统的学习效果
当教学引导阶段输入的教学内容为全部正确指令序列时,OpenNARS的任务完成度最高,如果传授错误指令则几乎无用。由此,连贯正确的教学内容对学习非常重要。尽管有学者大力提倡“挫折教育”[16],但类比于本实验结论,“挫折教育”的成功实际上存在前提条件,即错误经验必须要以正确经验为基础才能发挥作用。如若缺少正确引导的示例和榜样经验,“挫折教育”就会失去根基而变得盲目无效,甚至可能产生负面效果。
(三)适合的教学节奏能够提升通用人工智能系统的学习效果
实验三印证了教学节奏的必要性和重要性。教学间隔控制在3秒时,可使OpenNARS对已有信息进行充分推理分析而提升发出正确运动指令的概率。虽然少于3秒或多于3秒的间隔都出现学习效果的衰减,但间隔4秒仍优于间隔2秒,说明适当的教学“留白”有利于学习者对教学内容的消化吸收。在课堂教学实践中,人类教师需要权衡学生对知识的内化时间和课堂任务的推进状况。对通用人工智能系统而言,也同样需要选择适合的教学节奏以增强学习效果。
(四)适度的教学空间能够提升通用人工智能系统的学习效果
当教学空间处于较小的“3个单位长度”时,OpenNARS拥有较高的信息利用率,学习效果处于最佳水平。然而,随着教学空间的延展,感觉信息量激增,OpenNARS处理和利用信息的压力也随之变大。从发展的视角看,不论人类婴儿还是通用人工智能的机器婴儿,较大的教学空间不仅加重了学习者的认知负荷,也迅速降低了主体在环境交互过程中有效感觉信息的占比,阻碍了学习效果的提升。换言之,智能主体成长的初始阶段需要空间,却绝非越大越好,应在躯体的基本运动范围之内最大化提高与目标有关的感觉效用的发生概率。
七、启示与展望
本研究通过受控实验发现,人类教学原则同样能够提升通用人工智能系统的学习效果,从而在机器教育可能性的基础上,进一步确证了机器教育的有效性。然而,本研究仍存在某些不足及需要改进之处,如:实验更多利用自变量的理論极值,但更加细致的自变量水平可以得出改善通用人工智能系统学习效果更为精准的教学参数,有利于机器教育应用工作的开展。此外,对于教学空间自变量研究中5个单位长度的学习效果劣于7个单位长度,可能还隐含着其他作用变量。这些问题有待后续研究探查。同时,本研究还有三方面的理论反思与启示:
(一)虚拟与模拟的差异
尽管“元宇宙”已迅速成为当前教育领域的闪亮热点[17],但实证研究及细致的理论探索仍较为有限。在此问题上,基于本实验的设计与开发,有一个关键的理论问题需要辨析——虚拟和模拟是一对貌似相同却实则迥异的易混概念。事实上,虚拟和模拟是两种不同的技术取向[18]:虚拟的设计原点内嵌着第一人称的主体视角,强调系统元机制的设计与运作,这种机制既可以是以现实世界规律为蓝本,亦可以是完全崭新的设定,因为二者都能被虚拟现实技术所支持;模拟则倾向于第三人称的上帝视角,强调对现实世界表象的模仿和复刻,越细致、越细腻,便越逼真。但对虚拟来说,是否逼真不重要,不同对象之间的互动才最重要。以主流自动驾驶仿真平台CARLA为例,油门、转速、刹车、转向等参数非常丰富,但这些参数却是以上帝视角给出并计算,缺少具身嵌入和系统互动特征,更多体现出模拟而非虚拟特性。因此,“元宇宙”教学场景如果拥有逼真的细节,必能大幅增强学习者的临场感。但是,如果学习内容涉及与系统复杂的感知交互,则虚拟环境对主体的即时反馈才是关键。
(二)目标及动机系统的重要性
尽管学习动机一直是教育学中的常见问题,对其内在机制的探索却多见于心理学领域,即便如此,基于认知功能视角的心理学讨论仍非常有限。作为一种“类脑”认知系统,OpenNARS在四项实验中的学习行为值得深究,特别是“激活”与“成功”的关系更是剖析自治型智能体动机系统内部机制的关键:一方面,系统的“激活”是其行为“成功”的前提和保障。失活状态下,即便不断输入有效的教学材料,也根本无法触发任何行为,更不可能“成功”;另一方面,“激活”的动力源于目标系统,为了维持动机系统的活跃水平,目标需要被反复“强调”。换言之,这也许是未来教育学反哺人工智能的重要突破口。當前,专用人工智能的内嵌目标单一,虽易于建模和求最优,却不适于开放环境。在开放环境中,智能体的实际需求和目标总是多元和模糊的。这种目标之间的复杂关联具有个性化的经验印记,令传统的机器学习算法纷纷折戟[19]。面对当前主流人工智能的算法困局及人类婴幼儿时期快速发展的感觉、运动和语言能力,可以预见一条基于通用人工智能机器教育的新路。也许就在不远的将来,教育技术学界能够提供具有可解释、生成式、鲁棒性强等特点的机器人运动及其主动视觉的教育学解决方案。
(三)学习的主体与学习的科学
对专用人工智能而言,其在教育应用中可具有七种角色:辅导者、教练、评价者、协调者、联通者、同伴及学生[20]。其中,学生指智能导学系统所模拟、能以某种方式学习的数字代理,它可以让人类学习者临时扮演教师角色进行“教中学”。尽管同伴和学生角色的观感及行为模式似人,但它们均非真正意义上与人类等同的学习者。与此相反,“能自主感知、理解、预测和行动”的通用人工智能系统[21]不仅需要接受教育,还可以与人类共享教学经验。但其本身却不必貌似于人,甚至不能与人类太过相像,否则容易出现“恐怖谷”效应,引发人类学习者对机器厌恶和恐惧的感觉[22]。在人机共通的教育规律背后,蕴藏着一个重大的理论假设:存在跨越人类和机器学习者的普适性学习理论。这意味着,学习的本质也许是一种对开放环境主动适应的认知元能力。对碳基智能而言,从黏菌群体的社交行为[23]到非人类动物的“语言”交流[24],从人类婴儿的先天反射到后天知识技能的习得,学习呈现出横跨物种的连续谱以及愈加注重社会性遗传的特点。对硅基智能而言,专用人工智能的“机器学习”高度依赖数学工具,但通用人工智能的学习机理和学习过程高度依赖教育干预。科学研究强调客观规律在不同研究对象间的可重复性,横跨微生物、植物、动物及计算机等不同“学习者”的共同学习原理,既是对学习科学术语的最好注脚,也是构建教育科学理论大厦的奠基石。
[参考文献]
[1] MARK L.智能机器人养成记:开发人类友好型机器人[M].刘红泉,译.北京:机械工业出版社,2021:13-17.
[2] 李芒,余露瑶.须加强教育技术基础理论研究[J].电化教育研究,2022,43(9):5-13.
[3] 刘凯.人工智能与教育学融合的双重范式变革[J].开放教育研究,2023,29(3):4-18.
[4] 刘凯,贾敏,黄英辉,胡祥恩,王培.像教育人一样教育机器——人类教学原则能用于通用人工智能系统吗?[J].开放教育研究,2022,28(2):11-21.
[5] 戴益斌.为理智主义辩——从人工智能的视角出发[J].湖北大学学报(哲学社会科学版), 2022,49(1):154-161.
[6] 刘凯,胡祥恩,王培.机器也需教育?论通用人工智能与教育学的革新[J].开放教育研究,2018,24(1):10-15.
[7] 安吉洛·坎杰洛西,马修·施莱辛格.发展型机器人:由人类婴儿启发的机器人[M].晁飞,译.北京:机械工业出版社,2017:111-137.
[8] PEI W, CHRISTIAN H, PATRICK H. A model of unified perception and cognition[J]. Frontiers in artificial intelligence, 2022(5):1-14.
[9] 刘凯,贾敏.探索基于通用人工智能的自动驾驶[N].中国社会科学报,2022-08-23(007).
[10] 马会梅.坚持新课程倡导的教学原则[J].安顺师范高等专科学校学报,2005(1):9-10.
[11] 张楚廷.凯洛夫教学原则探疑[J].当代教育论坛,2012(3):123-125.
[12] 巴拉克·罗森海因,蒋慧,盛群力.教学原则:所有教师应了解的循证策略[J].课程教学研究,2017(7):8-15.
[13] 邱婷,鐘志贤.有效教学原则:客观主义视角[J].现代远距离教育,2007(3):15-18.
[14] GRAESSER C. Inaugural editorial for journal of educational psychology[J]. Journal of educational psychology,2009,101(2):259-261.
[15] LEWTHWAITE R, WULF G. Optimizing motivation and attention for motor performance and learning[J]. Current opinion in psychology, 2017,16:38-42.
[16] 杨柳.挫折教育在我国基础教育阶段的价值与意义[J].教学与管理,2015(21):68-70.
[17] 申灵灵,卢锋,张金帅,等.从化身到具身:元宇宙教育应用的价值效能与风险考量[J].电化教育研究,2023, 44(4):46-52.
[18] DESHKO P, KRYAZHENKOV G,CHEHARIN E.Virtual technologies[J]. Modeling of artificial intelligence,2016(1):33-43.
[19] 徐英瑾.人工智能哲学十五讲[M].北京:北京大学出版社,2021:25-27.
[20] 张志祯,张玲玲,徐雪迎,刘佳林.人工智能的教学角色隐喻分析——以人工智能教育应用领域高影响力项目为例[J].中国远程教育,2019(11):24-37,57,93.
[21] LATAPIE H, KILIC O, LIU G, YAN Y, KOMPELLA R, WANG P, TH?RISSON R, SUN Y, SRINIVASA J. A metamodel and framework for artificial general intelligence from theory to practice[J]. Journal of artificial intelligence and consciousness, 2021,8(2):205-227.
[22] MORI M, MACDORMAN F, KAGEKI N.The uncanny valley[J]. IEEE robotics & automation magazine,2012,19(2):98-100.
[23] JACOB B, BECKER I, SHAPIRA Y, LEVINE H. Bacterial linguistic communication and social intelligence[J]. Trends in microbiology,2004,12(8):366-372.
[24] ?ADKOV? L. Do they speak language?[J]. Biosemiotics, 2015,8(1):9-27.
Educating Machines as Humans: Can Human Teaching Experience Improve the Learning Effect of Artificial General Intelligence System?
LIU Kai1, JIA Min2, SUN Changxin1, MA Yuhui1, WANG Weijun2
(1.School of Educational Sciences, Bohai University, Jingzhou Liaoning 121013;
2.School of Psychology, Central China Normal University, Wuhan Hubei 430079)
[Abstract] Artificial Intelligence(AI) has been divided into two branches of Special purpose AI(SAI) and Artificial General Intelligence(AGI). Both can be integrated with education, but the former focuses on how to use AI to solve educational problems, such as intelligent education. The latter, on the other hand, focuses on how to solve AI problems by educational means, such as machine education. Existing studies have demonstrated the necessity and possibility of the latter, and this study explores the influence of human educational experience on the learning effect of artificial general intelligence systems through experiments, trying to verify the effectiveness of "machine education". The independent variables of the experiment come from four kinds of important factors in human teaching process, which are teaching goal, teaching content, teaching rhythm and teaching space. The results show that the artificial general intelligence system has highly similar sensitivity to the activation frequency of teaching objectives, the accuracy of teaching content, the time interval of teaching rhythm and the size of teaching space as human learners, which can be adjusted by the teaching parameters to obtain better learning results. Therefore, the human education experience can be generalized to artificial general intelligence systems as well. The confirmation of the objective education law of "human-machine compatibility" not only effectively counteracts the questioning of the scientific nature of educational theories with scientific evidence, but also is expected to realize the reverse feedback of pedagogy to AI research.
[Keywords] General Artificial Intelligence; Machine Education; Teaching Principles; Learning Effect; AGI
猜你喜欢
高教学刊(2022年13期)2022-05-24
中国教育信息化·高教职教(2022年4期)2022-05-13
民族文汇(2022年14期)2022-05-10
课程教育研究(2021年10期)2021-04-13
作文大王·笑话大王(2019年8期)2019-09-09
亚太教育(2016年33期)2016-12-19
新课程(2016年3期)2016-12-01
科教导刊·电子版(2016年26期)2016-11-21
人间(2016年28期)2016-11-10
职业(2016年10期)2016-10-20