基于改进指数趋近律的永磁同步电机滑模控制
2023-09-20 11:54诸德宏高齐
农业装备与车辆工程 2023年9期
诸德宏,高齐
(212013 江苏省 镇江市 江苏大学 电气信息工程学院)
0 引言
伴随着材料科学的发展,永磁同步电机(以下简称PMSM)因其结构简单、功率密度高、转子损耗小、起动转矩大等许多优点[1],在越来越多的伺服系统领域中得到运用,包括航天、电动汽车以及农业电气设备领域等[2]。
PMSM 的控制系统性能与控制算法相关,工业上常用的传统矢量控制采用的是双闭环控制,即转速外环和电流内环的控制策略,2 种控制环均采用PI 控制器[3]。对控制要求不高的系统,PI 控制已能满足基本要求,但对控制精度要求高的系统,PMSM 的非线性、强耦合的特点会使PI 控制效果大打折扣,对此,专家学者提出了多种控制器替代PI 控制器[4-5]。Wang 等[6]设计了一种滑模变结构高性能PMSM 直接转矩控制的系统,缺点是增加了控制系统的复杂性;Shi 等[7]提出一种新型趋近律,并设计了滑模速度控制器,将观测值补偿到速度控制器中,提升了控制系统抗扰性;Jiang 等[8]采用混合趋近律的滑模观测器,能够有效减小转速观测误差,抑制转矩脉动,提高系统的观测精度和动态响应性能;余江等[9]在传统指数趋近律的基础上,分析解决超调大、抖振幅度大等问题,并将符号函数进行平滑处理;杨小聪[10]为优化PMSM 速度调节系统的动态性能,研究了使用滑动模式控制的非线性速度控制算法;金晶等[11]提出了一种用于PMSM 伺服系统的自适应卡尔曼观测器(SAKO),SAKO 可以弥补分辨率有限的绝对编码器的测量噪声,避免传统测速方法的微分过程和滤波延迟。高为炳[12]通过对设计的滑模控制和DPCC 反馈来补偿估计值,以提高速度鲁棒性和当前跟踪精度;付东学等[13]通过对传统终端滑模控制进行改进,设计了一种具有非奇异性的改进型快速终端滑模控制策略,该方法可以有效地抑制传统终端滑模控制中存在的抖振现象,减小了奇异性对系统造成的影响,提高了系统的响应速度。同时,为了估计系统扰动中存在的不确定参数,在滑模控制器的设计中引入了自适应控制,削弱了扰动对系统产生的影响,提高了系统的鲁棒性,但由于整体算法设计较为复杂,导致状态变量较难定义;Chen 等[14]通过改进传统滑模面,提出了一种基于分数阶滑模面的滑模控制方法,该方法有效地减弱了系统状态点在滑模面上向平衡点滑动过程中存在的抖振现象,优化了系统的跟踪性能。为进一步减弱扰动对系统性能的影响,该方法引入了自适应模糊观测器来观测并补偿系统的扰动项,但由于模糊规则的存在,设计需要大量的实验数据,导致设计过程十分复杂。综上所述,优秀的算法的确可以提高系统的控制效果和跟踪性能,但同时也增大了系统的计算量和计算难度。因此,要想获得更加优异的控制效果就必须为滑模控制器设计一个合理的趋近律。
本文提出了一种基于改进指数趋近律的新型PMSM 滑模变结构控制策略,改进的指数趋近律通过引入更加平滑的fal(s,α,δ)函数,代替传统的sgn(s)函数,并改进了趋近时的函数,进而提升了系统状态点在接近滑模面时的切换效果和趋近速率。通过李雅普诺夫(Lyapunov)函数,验证了改进趋近律的稳定性。最后通过仿真对比传统指数趋近律和快速指数趋近律,结果表明由该趋近律设计的速度控制器具有良好的控制性能,有效削减了系统的抖振,提高了系统的快速性和鲁棒性。
1 改进趋近律设计
1.1 传统指数趋近律
式(1)中的传统指数趋近律[15]分为2 部分:等速趋近项εsgn(s)和指数项趋近项ks。系统处于起动阶段时|s|较大,此时指数项起主要作用,迫使系统状态点快速趋近于滑模面;当系统状态点接近滑模面时,等速项起主要作用,此时系统趋近速度由系数ε决定。
对于传统指数趋近律,当s>0 时有
假设t=0 时,s=s0,化简式(2)有
式(3)中的系数ε和k分别决定了等速项和指数项的趋近速度。由式(3)可直接看出,增大相关系数的确可以加快系统状态点到达滑模面的时间,但同时也会加剧到达滑模面后的抖振,导致减小趋近时间和削弱滑模抖振的矛盾。
1.2 快速指数趋近律
如式(4)所示
式中:ε>q,q>0,a>0,b>0。
通过引入变量函数[16-17],改善了系统性能,虽然超调和抖振得到有效抑制,但系统的响应速度变慢,同时增加了系统响应时间。当系统状态点离滑模面较远时,变量函数趋近速度大,系统状态点快速接近滑模面,但由于符号函数的存在,系统状态点在到达滑模面后会出现剧烈抖动,影响系统的动态性能[18-19]。
1.3 改进指数趋近律
为了减少传统指数趋近律和快速指数趋近律接近滑模面[20]时符号函数带来的抖振,设计并提出了一种改进的指数趋近律。
式(5)中fal(s,α,δ)的表达式为
式中:α——非线性影响因子;δ——滤波影响因子;x1——系统状态变量,x1=ωr-ωm。k1>0,k2>0,0<α<1,δ>0,1 <γ<2,β>0。
式(5)引入的fal(s,α,δ)是一种非线性连续函数,具有快速收敛的特性,替代原来的sgn(s)函数,使得滑模控制的滑动过程更加平滑,同时减少了系统的抖振。
1.4 改进指数趋近律稳定性分析
构建Lyapunov 函数,验证改进后的新型趋近律的稳定性,验证过程为
由于sgn(s)与s同号,ssgn(s)>0,所以。
比较3 种趋近律的收敛性,效果如图1 所示。由图1 可以明显看出,改进后的趋近律相比传统指数趋近律、快速指数趋近律在控制效果和控制时间上都得到了改善。
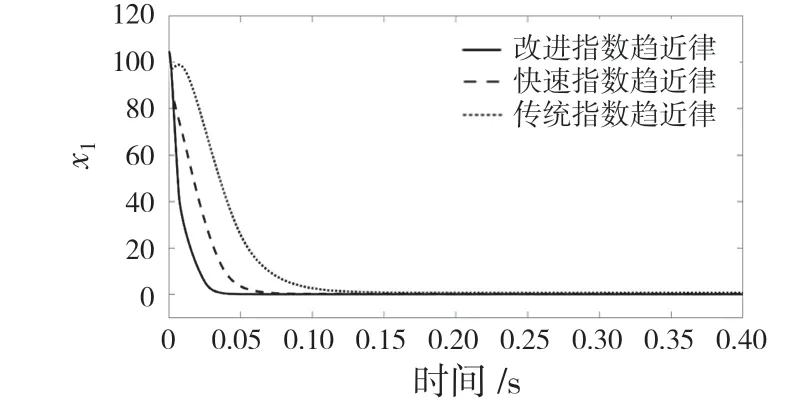
图1 趋近律收敛性比较Fig.1 Comparison of the convergence of reaching law
2 滑模速度控制器设计
2.1 PMSM 数学模型
在假设电机元件、运行条件为理想状态的前提下,简化电机数学模型。对于表贴式PMSM,在id=0 的条件下,选取旋转坐标系d-q轴下的数学模型,PMSM 定子电压方程为
由式(11)化简得:
式中:ud,uq,id,iq——d,q轴的电压和电流;Rs——定子电阻;Ls——定子电感;ωe,ωm——电气角速度和机械角速度;φf——磁链;Pn——电机极对数。电机的电磁转矩方程和机械运动方程为
式中:Te——电磁转矩;TL——负载转矩;J——转动惯量。
2.2 控制器设计
构建PMSM 系统的状态变量
式中:ωr——电机的给定转速。
选取的滑模面函数为
式中:c1——待设计的参数。
对式(17)两边同时求导可得:
结合式(5)中提出的改进型趋近律与式(18)可得控制器u的表达式为
对u积分可得q轴的参考电流的表达式为
3 仿真结果分析
根据参考电流的表达式,在MATLAB 中的Simulink 模块搭建速度控制器的仿真模型。PMSM电机相关参数如表1 所示。
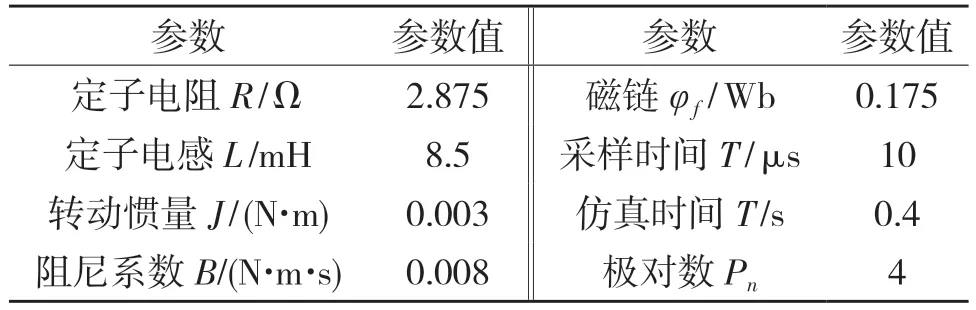
表1 电机参数Tab.1 Motor parameters
控制算法中的相关参数取值如表2 所示。

表2 控制算法参数设置Tab.2 Control algorithm parameter settings
系统给定转速为1 000 r/min,并在0.2 s 时突加负载,观察系统的转速、转矩和电流变化。PMSM 控制系统的MATLAB 仿真结构图如图2 所示,由电流环和转速环双闭环组成。电流环仍采用普通的PI 控制,转速环加入了改进指数趋近律的滑模速度控制器。对比传统指数趋近律控制器、快速指数趋近律控制器和本文的改进指数趋近律控制器,三者的转速仿真结果如图3 所示。
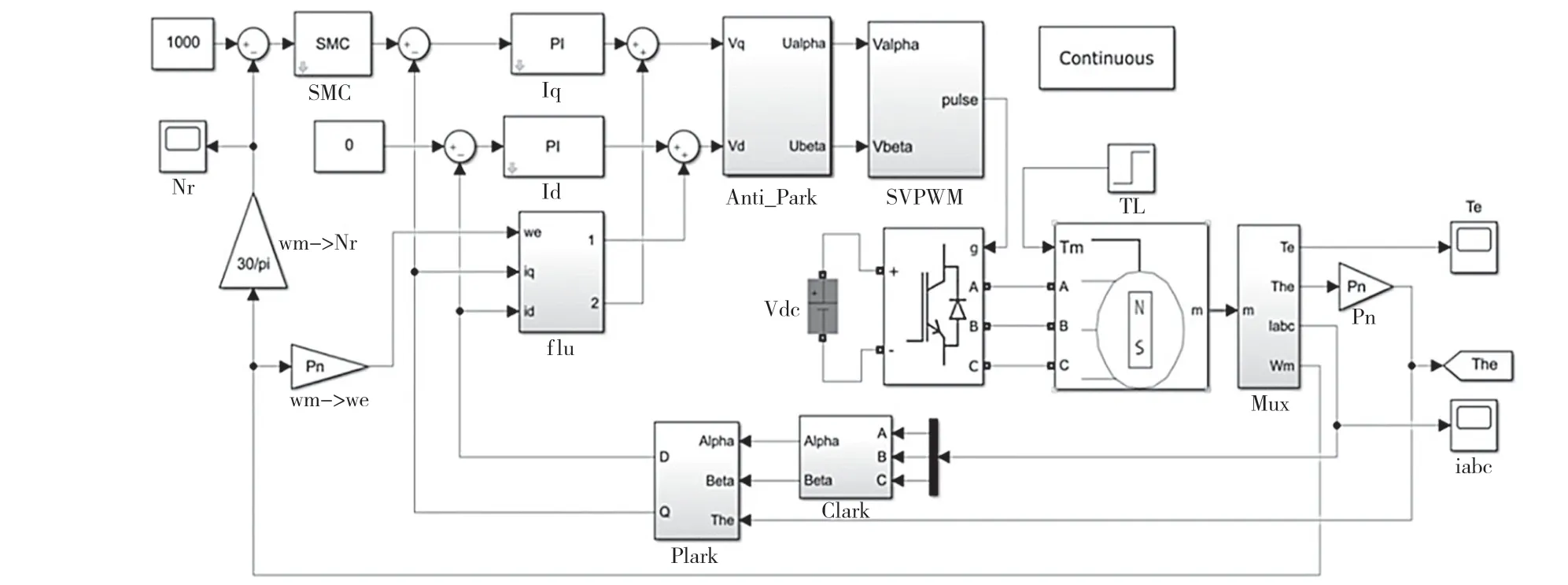
图2 MATLAB 仿真结构图Fig.2 MATLAB simulation structure diagram
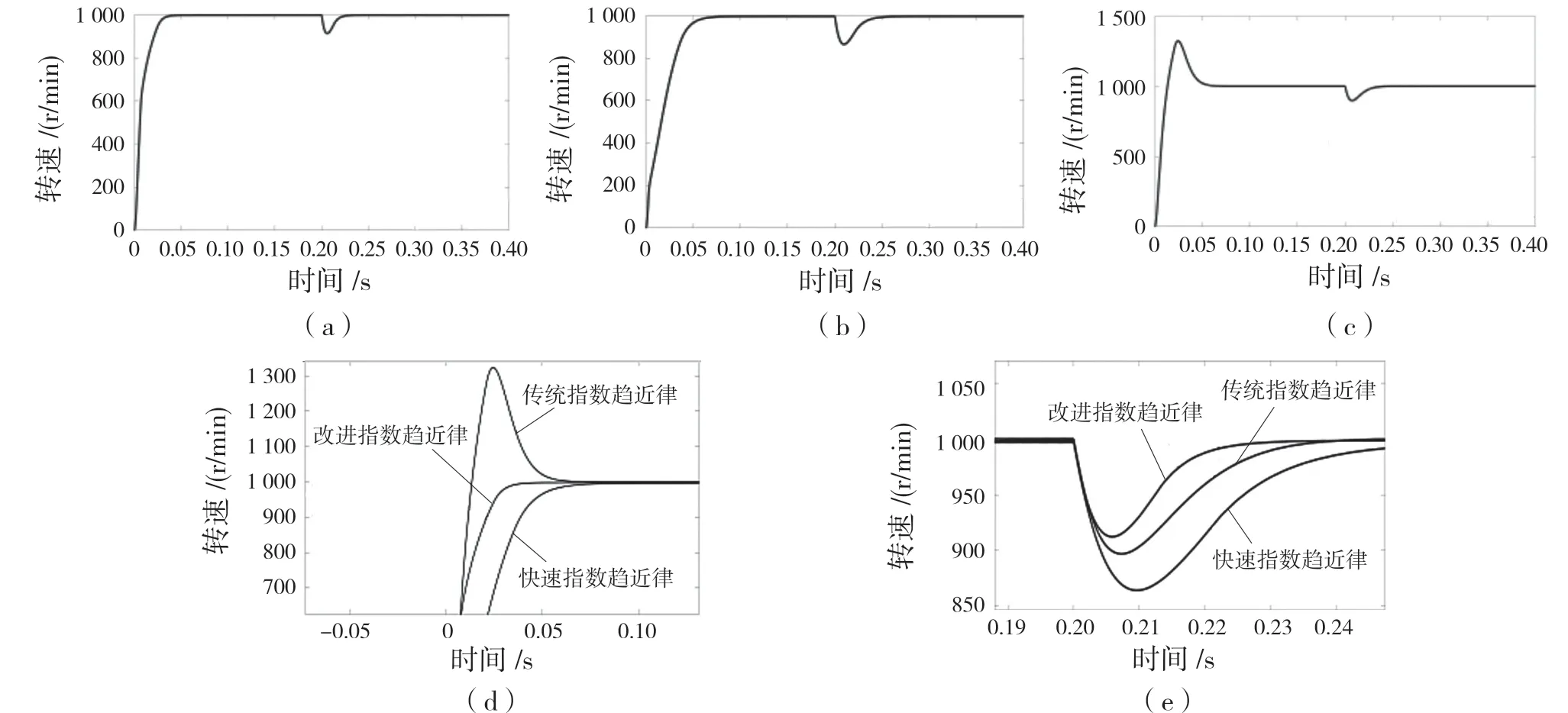
图3 3 种指数趋近律下转速控制比较Fig.3 Comparison of speed control under three exponential reaching laws
图3(a)为改进指数趋近律控制器的转速响应曲线,起动阶段有斜率的变化是由于系统状态点接近滑模面,fal(s,α,δ)切换所导致的,这使得起动速度略微下降,但相较于传统趋近律控制器和快速趋近律控制器下的起动转速,改进后的趋近律仍有较好的作用。图3(b)为快速指数趋近律控制器下转速的响应曲线,相较于传统指数趋近律控制器,在起动阶段的超调得到了很好的抑制,但响应到达稳定状态的时间延长了,且对于负载扰动变化较为敏感。图3(c)为传统指数趋近律控制器下的转速响应曲线,其优点是系统的响应速度快,缺点是超调量较大,对于稳定性要求较高的控制系统,传统趋近律控制器很明显不能达到控制要求。
从图3(d)对比中的仿真效果来看,在起动阶段,传统指数趋近律控制器虽然趋近速快,但超调量较大,到达稳定状态的时间也较长;快速指数趋近律控制器改善了传统趋近律的超调情况,但同时导致到达稳定的时间过长;改进指数趋近律可以很明显地看到,由于非线性因子的作用,系统的超调情况和快速性都得到了很好的改善。同时,对于图3(e)中的突变负载的扰动,改进指数趋近律也同样表现了良好的控制性能。
图4(a)为改进指数趋近律控制器下的转矩响应曲线,在起动阶段,改进指数趋近律控制器的转矩响应到达稳定状态的时间更短,这说明了控制方法的快速性,同时在到达稳定状态的过程中,改进后的控制器对于系统扰动具有更好的抑制作用。图4(b)为快速指数趋近律控制器下的转矩响应曲线,该方法减小了系统起动阶段的超调,但同时导致系统的响应时间延长,且转矩对于系统扰动敏感,系统的鲁棒性差。图4(c)为传统指数趋近律控制器下的转矩响应曲线,其最明显的问题在于超调过大。通过图4(d)对比可以看出,在起动阶段,改进指数趋近律控制器相较于传统指数趋近律控制器和快速指数趋近律控制器而言,系统抖动更小,到达稳定状态的过程更加稳定。对于突加的扰动,改进后的趋近律响应更为迅速,但存在一定的超调问题。
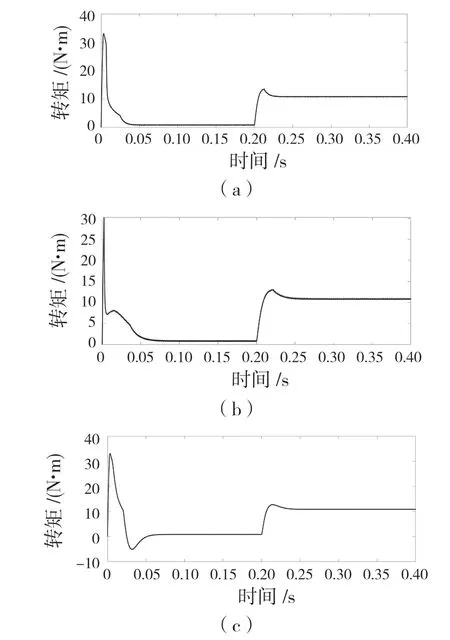
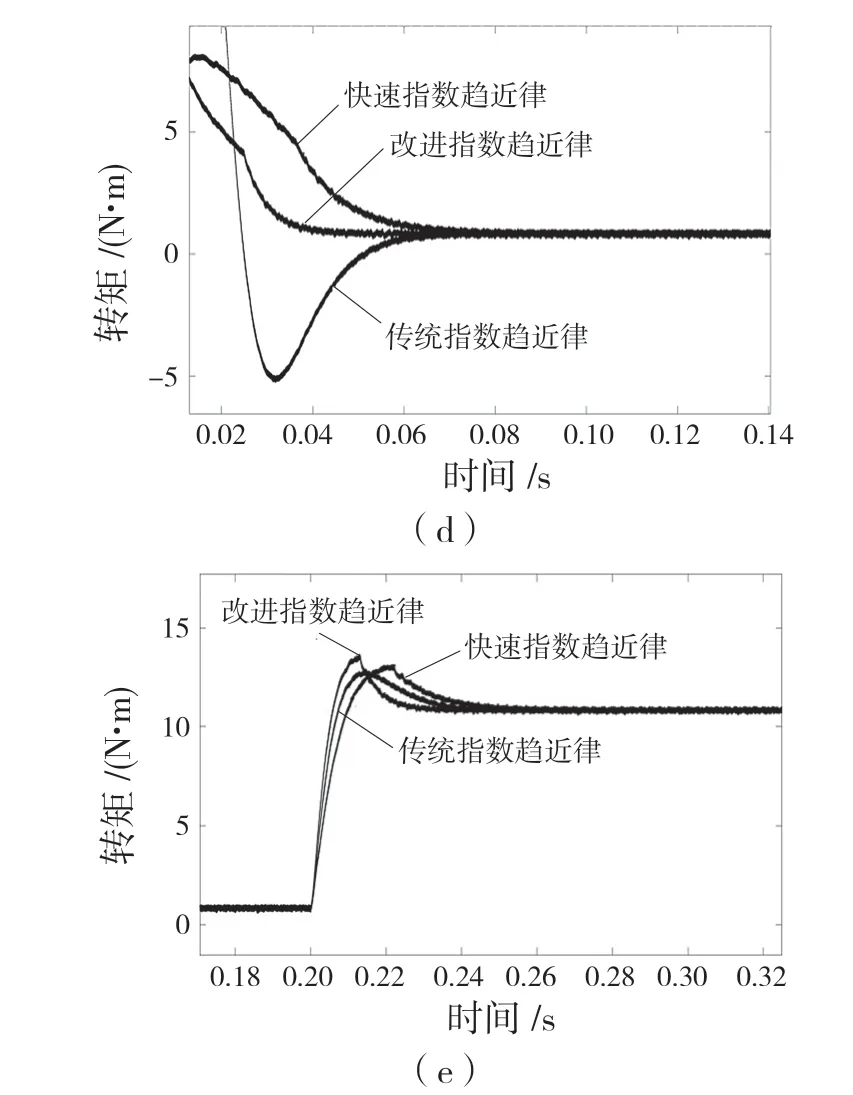
图4 转矩在不同趋近律下的响应Fig.4 Response of torque under different reaching laws
4 结论
本文通过引入fal(s,α,δ)函数,并改进了趋近时的函数,设计了一种改进的指数趋近律,分析了收敛性,验证了趋近效果,并设计出了基于该趋近律的滑模速度控制器,将控制器运用到了PMSM的速度控制中。通过仿真验证了改进指数趋近律控制器的快速性以及抑制抖振的性能,并将其与传统指数趋近律控制器和快速指数趋近律控制器进行对比,结果表明,改进指数趋近律控制器提高了系统的鲁棒性和快速性,优化了系统的动态性能。
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
四川冶金(2018年1期)2018-09-25
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
华东理工大学学报(自然科学版)(2014年6期)2014-02-27