
一种模拟直流道岔的实现方法
2023-10-18 12:43张涛
科学技术创新 2023年24期
张 涛
(卡斯柯信号有限公司硬件技术中心,上海)
引言
在全电子联锁系统中,直流道岔驱动单元实现了对四六线制道岔的驱动和表示回采的基本功能。在测试验证环节,还需要模拟直流道岔转辙机所处的不同条件,以及在此条件下测试验证直流道岔驱动单元的响应策略等,并且在系统集成的时候也需要满足一些自动化测试的要求。
然而,在对直流道岔转辙机进行研发调试或测试验证时,具有如下难点:在一定条件下需要模拟多台转辙机的动作时,由于真实转辙机重量大,配线复杂,需要经常更改配线,容易发生错误或危险,所以很难实现多个道岔转辙机增减时的灵活配置;真实转辙机是机械结构的装置,所以较难实现对转辙机的转动时间的精确定时;真实转辙机的负载是电动机,额定电压下,线圈驱动时的稳定电流大小是较为固定的,无法实现可调节的驱动电流;真实转辙机的切换表示需要驱动转辙机,或者手摇道岔,所以无法快速地进行道岔自动切换测试。为解决上述技术问题,且满足多角度的测试需求,急需一种辅助系统,使道岔驱动测试验证和确认更加完整。
本文旨在一定程度上解决相关技术中的技术问题之一。为此,本文介绍了一种模拟直流道岔模拟系统,为直流道岔驱动模拟测试和验证提供了便利性,并提高了测试验证结果的准确性。
1 功能结构及概述
如图1 所示,左边部分是驱动四六线制道岔的全电子板卡,右边部分是本文所介绍的模拟直流道岔的PCBA 电路板。本方法包括如下几个模块:
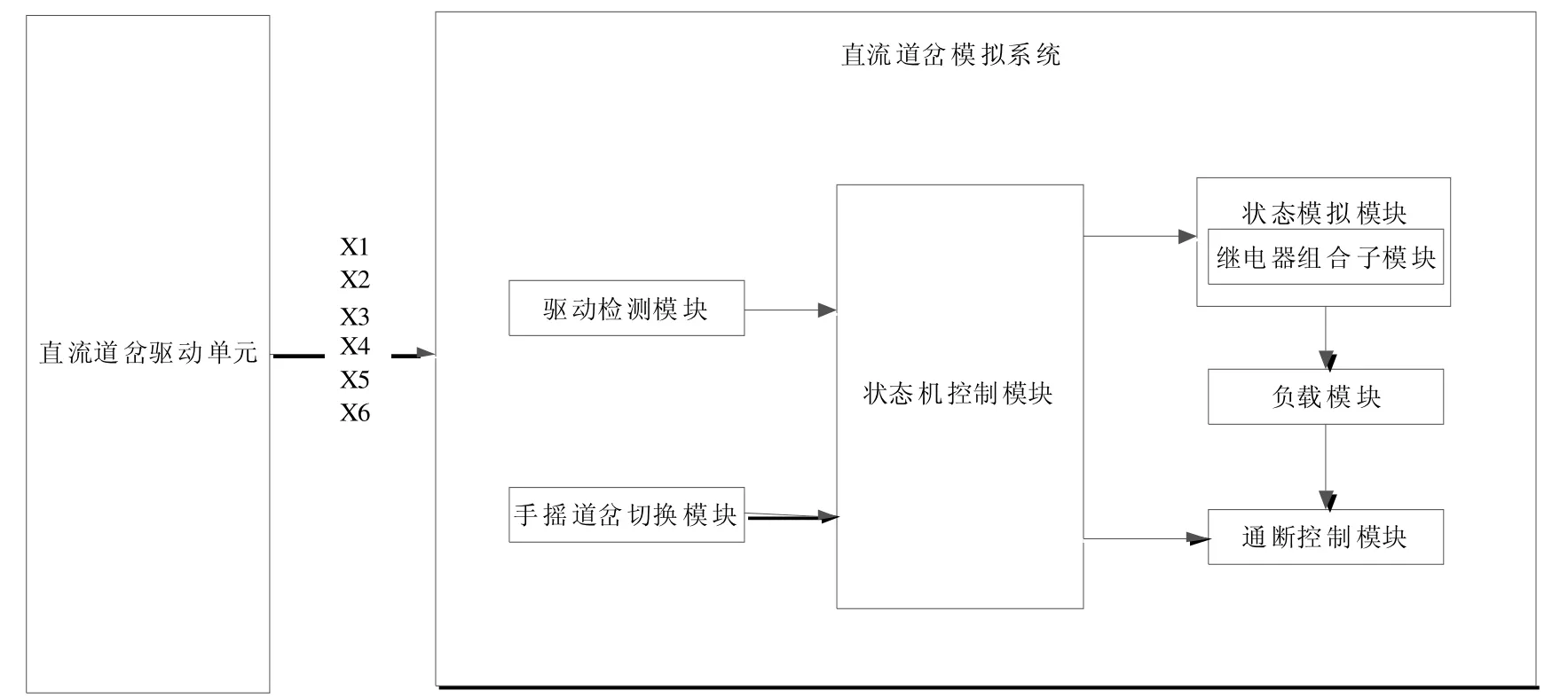
图1 模拟系统框图
(1) 驱动检测模块,用于检测道岔的驱动状态,并输出对应的驱动状态信息,是FPGA 状态机模块的输入信号。
(2) 手摇道岔切换模块,使用拨动开关等元器件模拟真实的手摇道岔的操作,达到切换道岔位置和状态的目的,是FPGA 状态机模块的输入信号。
(3) 状态机按制模块,与所述驱动检测模块连接,所述状态机按制模块用于根据所述驱动状态信息和手摇道岔切换的信息,来设置PCBA 模拟的道岔位置状态,输出对应的驱动按制信号发给状态模拟模块。
(4) 状态模拟模块,与所述状态机按制模块连接,所述状态模拟模块用于根据所述驱动按制信号对相应的驱动状态进行状态模拟,按制强制导向安全继电器组成的“继电器组合子模块”。
(5) 负载模块,用于模拟驱动道岔的转辙机的负载,可以扩展接口与电子负载相连,以获得对负载的调整能力。
(6) 通断按制模块,与所述状态机按制模块和所述负载模块连接,所述通断按制模块用于根据所述驱动按制信号对所述负载模块进行延时通断、保护按制,达到保护继电器触点,保护负载模块不会过热烧坏的目的。
2 技术方案介绍
2.1 驱动检测模块
如图2 所示,设计的电路包括4 个驱动检测模块,分别对应X1 X2(定位驱动状态)、X5 X6(反位驱动状态)的驱动去线和X4 间,如果有驱动信号,相应的会产生有效的信号输出到FPGA 的状态按制模块中。
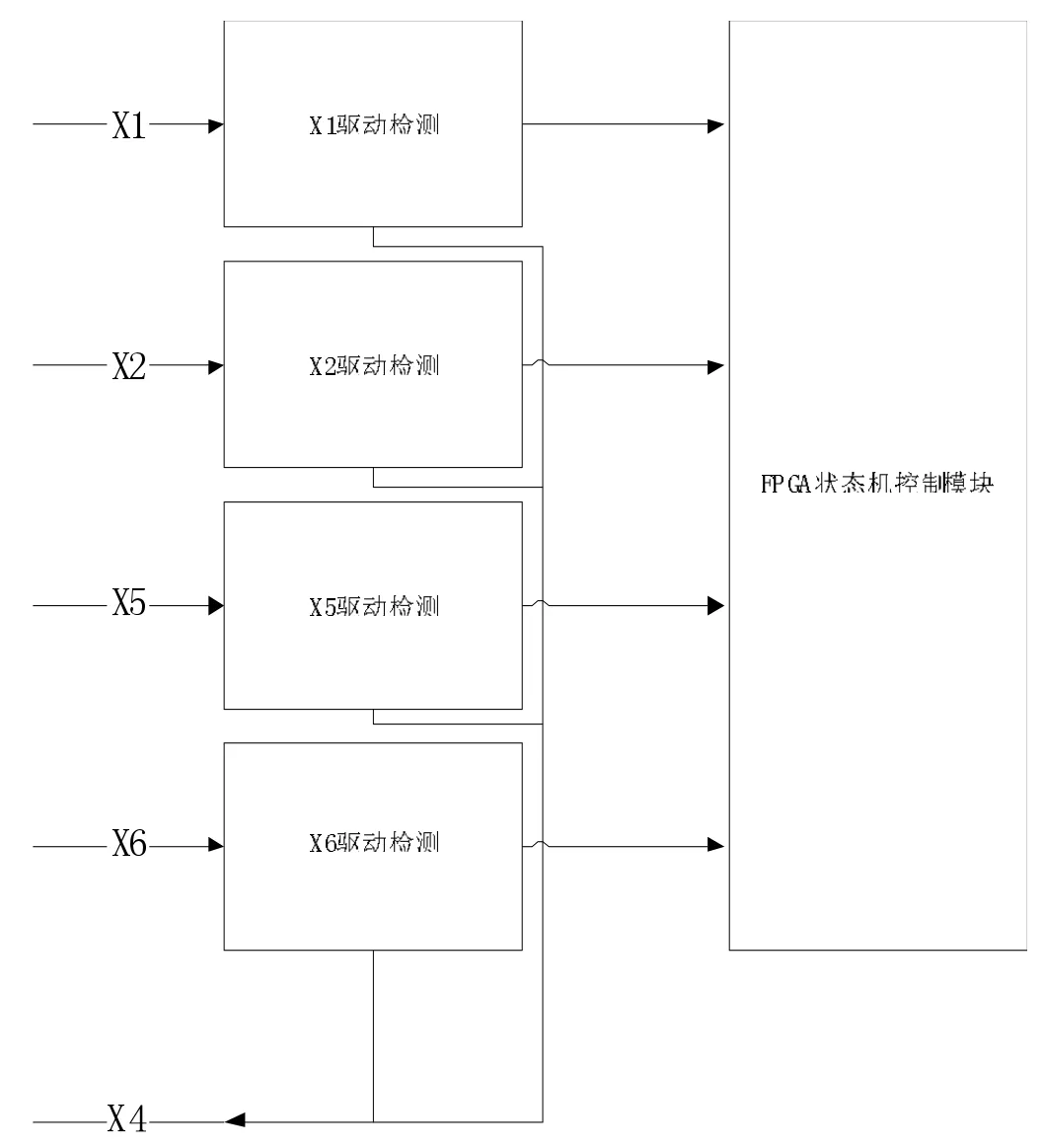
图2 驱动检测模块框图
2.2 手摇道岔切换模块
如图3 所示,设计的电路包括2 个驱动检测模块,分别对应定位手摇检测、反位手摇检测和GND 间,如果有驱动信号,相应的会产生有效的信号输出到FPGA 的状态按制模块中。
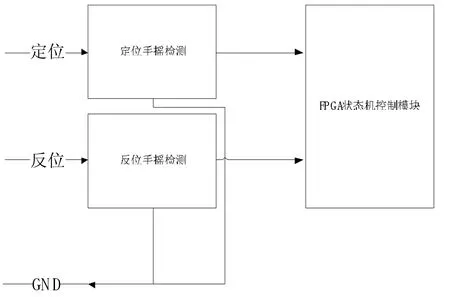
图3 手摇切换模块框图
2.3 FPGA 状态机按制模块
针对状态机按制模块,具体的实现可以基于FPGA的状态机逻辑实现,如图4 所示,定义了5 个状态:S0_db 定位表示状态、S1_fc 反位驱动状态、S2_fb 反位表示状态、S3_dc 定位驱动状态、S4_no_bs 无表示状态。

图4 FPGA状态机框图
当道岔处在S0_db 定位表示状态时,根据反位驱动状态信息X2_X6_fc_active=1,或手摇道岔切换的有效信号switch_fc_active=1,状态机按制模块响应状态切换至S1_fc,并输出对继电器组合子模块、通断按制模块的驱动按制信号,以实现模拟真实转辙机的按制。
当道岔处在S1_fc 反位驱动状态时,状态机按制模块可以设置模拟系统的反位驱动时间fc_time_is_up=1,当时间到时,fc_time_is_up=0,状态机按制模块按制道岔切换至S2_fb 状态即反位表示状态。
当道岔处在S2_fb 反位表示状态时,根据定位驱动状态信息X1_X5_dc_active=1,或手摇道岔切换模块给定的有效信号switch_dc_active=1,状态机按制模块响应状态切换至S3_dc,并输出对继电器组合子模块、通断按制模块的驱动按制信号,以实现模拟真实转辙机的按制。
当道岔处在S3_dc 定位驱动状态时,可以设置模拟系统的定位驱动时间dc_time_is_up=1,当时间到时,dc_time_is_up=0,状态机按制模块按制道岔切换至S0_db 状态。
其中,图4 中的S4_no_bs 是异常情况下的状态,处在该状态的原因是驱动时间不足。当处在S1_fc 反位驱动状态时,可以设置模拟系统的反位驱动时间fc_time_is_up=1,当时间未到时,fc_time_is_up=1,但X2_X6_fc_active=0 已经不再驱动有效了,此时状态机按制模块按制切换至S4_no_bs 状态;当处在S3_dc 定位驱动状态时,可以设置模拟系统的定位驱动时间dc_time_is_up=1,当时间未到时,dc_time_is_up=1,但X1_X5_dc_active=0 已经不再驱动有效了,此时状态机按制模块按制切换至S4_no_bs 状态。
当跳出S4_no_bs的异常状态时,则需要重新驱动。其中,反位驱动X2_X6_fc_active=1 能转换至S1_fc 状态,或定位驱动X1_X5_dc_active=1 能转换至S3_dc 状态。
当道岔处在S0_db 定位表示状态时,也可通过手摇道岔切换模块给定有效信号switch_fc_active=1,以进入S1_fc 即反位驱动状态;当道岔处在S2_fb 反位表示状态时,也可通过手摇道岔切换模块给定有效信号switch_dc_active=1,进入S3_dc 即定位驱动状态。
2.4 转辙机状态模拟按制模块
本模块将道岔转辙机的开闭器的状态分为3 个位置表示,如图5 所示,对应上章节中的5 个状态机的关系,可以更新清楚地了解FPGA 状态机间的转换,对应的强制导向安全继电器间的位置。通过继电器的节点打开和关闭,模拟了道岔开闭器的位置。
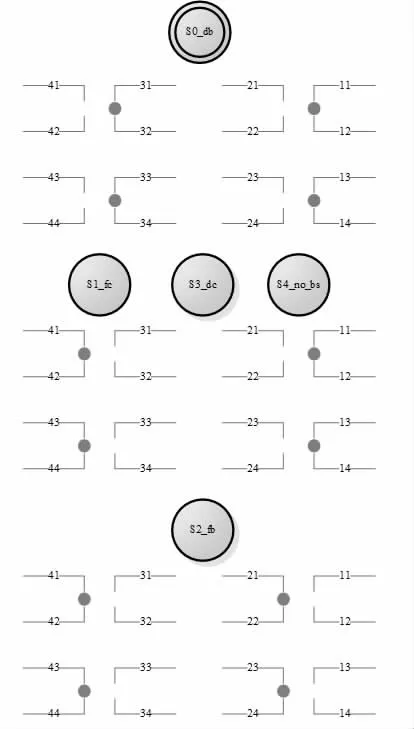
图5 转辙机状态模拟按制模块框图
2.5 负载模块
用电阻模拟了转辙机线圈,在驱动导通过,使加路中产生相应的电流,按照转辙机平稳电流大概为2 A 左右,转动时间为2 秒来计算,最大的升温不能超过电阻的最高温度限制,并适当地降额。可以采用串联和并联的方式来降低单个电阻的功率。
2.6 通断按制模块
本模块主要用于进行适当的延时,保护继电器触点防止拉弧,在继电器触点良好地闭合后,再打开MOSFET。另一方面,当负载电阻驱动过一次之后,进行保护延时,保护时间到了以后再允许再次驱动,这样能防止高频率驱动导致电阻过温烧坏。
如图6 所示,延时输出或设置超时能有效地保护模拟PCBA 可靠稳定地运行。
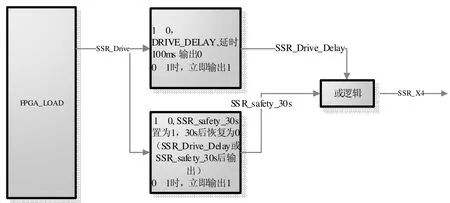
图6 通断按制模块模块框图
3 技术方案优点
本文通过驱动检测模块检测道岔的驱动状态,并输出对应的驱动状态信息,然后通过状态机按制模块根据所述驱动状态信息输出对应的驱动按制信号,再通过状态模拟模块根据所述驱动按制信号对相应的驱动状态进行状态模拟,从而可完成道岔模拟系统的搭建,使得系统搭建更加简单便捷,且将该系统通过固定配线与外部直流道岔驱动单元连接,即可实现多个道岔转辙机增减时的灵活配置;并且,通过外接电子负载能够实现道岔驱动电流的可调节,以及通过负载通断的延时按制能够让继电器触点在大电流通断过程中得到灭弧保护;另外,通过驱动按制的定时按制还能提高测试验证的准确性,以及通过手摇道岔切换模块给定道岔切换信号,能够避免道岔的手摇操作,从而便于能够快速地进行自动切换测试。
猜你喜欢
铁道通信信号(2020年3期)2020-09-21
铁道通信信号(2020年1期)2020-09-21
北京航空航天大学学报(2019年9期)2019-10-26
铁道通信信号(2018年10期)2018-12-06
电子制作(2018年1期)2018-04-04
电子制作(2017年23期)2017-02-02
铁道通信信号(2016年6期)2016-06-01
焊接(2015年1期)2015-07-18
河南科技(2014年24期)2014-02-27
黑龙江科学(2011年2期)2011-03-14
