混合电推进能源管理系统模糊逻辑控制
2023-12-08 08:38朱炳杰朱莹涛李建奇
国防科技大学学报 2023年6期
朱炳杰,朱莹涛,李建奇
(1. 国防科技大学 空天科学学院, 湖南 长沙 410073; 2. 湖南文理学院 计算机与电气工程学院, 湖南 常德 415000)
受限于当前储能电池能量密度水平,同等质量的飞行器,传统燃油动力在航程与航时上明显优于纯电动力。混合电推进系统是通过油动和电动组合在一起并发挥能源高效利用的复合动力系统。此系统的设计可以提升飞行器单种动力在宽工况下的效率,因而能够大大提高飞行器的续航时间,进而满足实际工作中长航时的需要,具有重要的现实意义[1-2]。
现有技术条件下,油电混合推进系统能量密度优势明显,在包含发动机、发电机、储能电池等系统设计前提下,其能量密度是纯电池的3倍以上,且在燃油不断消耗的情况下,混合电推进系统的综合能量密度还有待进一步提高,而电池的质量则不会随着电量的减少而减少[3]。发动机的机械效率一般在80%~90%,向上提升的空间较小。而发动机的热效率一般在20%~40%,上升空间很大,若发动机热效率能提升到50%以上,则混合电推进系统的优势也将有很大提升。
由于发电机和储能电池的动态响应特性不同,因此需要使用能量管理系统控制混合动力的输出功率,在满足负载功率需求的前提下,通过能量管理策略的优化调度,以提高电力系统的稳定性和燃油经济性。因此,能源管理技术是混合电推进系统发展的关键因素。
在能源管理技术的研究方面,Hu等[4]分析了基于人工智能的能源管理方法,用于对用电系统功耗的动态预测,有效提升了能源的利用效率。对于可再生能源系统,在多节点发电系统中融合人工智能控制[5],用于克服各系统之间的间歇性和模糊性,从而提升能源系统的供电稳定性。
针对混合电系统能源控制管理,相关研究人员做了大量的研究工作,也取得了较好的研究成果。赵丁选等[6]针对串联式混合动力系统提出模糊逻辑控制策略,通过在线估计系统需求转矩,以需求转矩和超级电容荷电状态(state of charge, SOC)值作为输入,得到发动机、发电机及电动机的输出转矩。雷涛等[7]提出了一种动态平衡能量管理策略,使混合动力系统各电源的能量消耗处于相对平衡的状态,避免了其中一种电源能量先耗尽的情况,可以满足多种工况的变化,提高了混合电源的能量利用率和稳定性。Ji等[8]根据多能源混合动力系统的混合度组成,结合飞行器不同工况条件下的功率需求,动态调节混合动力系统的功率混合度,从而提升能源系统能量利用效率。混合电系统可使发动机处于燃油经济性最高的区间运行,从而有效提升能源系统的能量利用效率,Hung等[9]以固定翼无人机飞行工况为应用背景,通过仿真验证了这一结论。Friedrich等[10]以发动机理想油耗曲线为依据,开展了20 kg级的混合电推进无人机的总体设计。类似的研究还有Riboldi等[11]利用优化方法进行小型混合电推进无人机的初始化设计。
从以上研究者的成果分析来看,主要是为了提升燃油经济性和能源系统用电效率。由于混合电推进系统的复杂性,采用准确的数学模型的传统设计方法难以获得预期的效果。模糊逻辑控制是基于模糊逻辑,模仿人类控制经验和知识的一种智能控制,模糊集合的模型控制理论在当前工业领域十分活跃,运用模糊逻辑方法来设计混合电推进系统能源管理策略是可行并且有优势的[12]。
本文设定的能源管理基本规则为:飞行过程中任意时刻的动力功率都可满足;人为控制的动力输入都可实现;储能电池的荷电状态始终维持在预设的区间;飞行过程中整个混合动力系统能量利用效率最大化。
基于此类研究思想,本文以100 kg级垂直起降飞行器为原型,研究了混合电推进能源管理系统模糊逻辑控制方法。在飞行过程中任意时刻的动力功率都可满足的条件下,设定了混合电推进飞行器的模糊规则,结合储能电池荷电状态的动态调整,实现飞行过程中整个混合电推进系统能量利用效率最大化。
1 系统建模
1.1 飞行器功率模型
本文研究的100 kg级垂直起降飞行器能源系统为串联式混合动力系统,飞行器如图1所示。串联式混合电推进系统中提供电能的有两个供电系统,一是发电机,二是储能电池。如图2所示,发电机输出的电能通过功率总线带动负载电机工作,此时发动机工作在最佳工作点;当发电机输出的功率满足不了电机的实际功率时,储能电池将向电机提供额外的动力;在发动机不运转的情况下,完全由储能电池向电气设备供电,在发动机运转起来后转由发电机向电机设备供电,同时发电机也向储能电池充电来补充电能。

图1 垂直起降飞行器Fig.1 Vertical takeoff and landing aircraft
混合动力系统综合利用燃油发动机的高能量密度和储能电池的高功率密度,在确保飞行过程中任意时刻的动力功率都满足的前提下,提高飞行器的航时。飞行过程中,燃油发动机工作在燃油经济性最高的区域,在飞行器需求功率较大时,电池可快速做出响应,弥补发动机输出功率的不足,确保系统功率需求;在系统功率需求较小时,发动机输出的盈余功率可用于电池充电,从而提升能量的利用效率,提高飞行器的航程。
飞行器飞行任务剖面如图3所示,主要分为三个阶段:起飞(T0~T2,约5 min)、巡航平飞(T2~T3,约60 min)、降落(T3~T5,约9 min)。
垂直起降飞行器飞行工况有垂直起降、悬停、巡航等。结合图3中的飞行任务剖面,功率需求如式(1)所示。

图2 混合电推进系统组成Fig.2 Composition of hybrid electric propulsion system

图3 飞行器飞行任务剖面Fig.3 Mission profiles of aircraft
(1)
式中:W为起飞总质量;S为机翼面积;β为燃油质量消耗系数,即当前燃油质量与初始燃油质量比值;q为飞行动压;CD0为零升阻力系数;K=1/(πe·AR)为升致阻力系数,其中AR为机翼展弦比,e为奥斯瓦尔德因子;h为飞行高度,dh/dt为爬升率;V为飞行速度;ηp为螺旋桨效率;g为重力加速度。稳定巡航时,飞行速度满足:
(2)
其中,ρ为空气密度,CL为升力系数。
飞行器垂直起飞过程对应旋翼模式,因此需要与固定翼模式区分并单独分析。旋翼吸收功率与推力的关系为:
(3)
式中,T为螺旋翼推力,vi为旋翼轴向诱导速度,μFM为旋翼效用因子。则vi和μFM可分别表示为:
(4)
μFM=0.474 2T0.079 3
(5)
通过假定平板阻力得到飞行器在垂直起降过程的推力公式为:
TVTOL=1.2[W+ρ·(RROC)2·Sproj]
(6)
式中:RROC为垂直起降过程爬升率,Sproj为旋翼桨盘面积,即
(7)
其中,MMTOW表示最大起飞质量,nprop为旋翼个数,PDL为桨盘载荷,可用经验公式计算
PDL=3.226 1MMTOM+74.991
(8)
结合飞行器相关设计参数,如表1所示,通过式(1)~(6)可以计算出垂直起飞过程的功率需求。
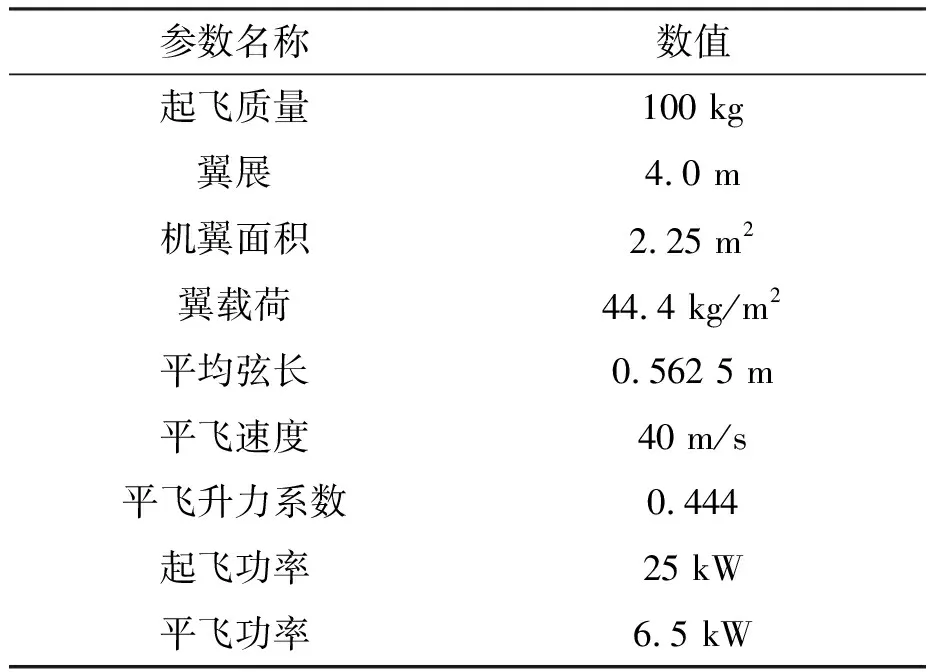
表1 飞行器相关参数设计
1.2 混合动力系统模型
结合图1、图2,串联混合电力系统主要由螺旋桨、旋翼、负载电机、主动力单元(包括发动机、发电机、能量管理系统)、储能电池等部件组成。电动机的能源来源于两部分,一是燃油,二是储能电池。燃油的部分能量可以转化为电能存储在储能电池中。燃油的能量密度为efuel、电池的能量密度为ebatt,因此燃油的能量[13]可表示为:
(9)
储能电池存储的最大能量可表示为:
(10)
其中:Wfuel,max和Wbatt分别表示燃油最大携带质量和电池组质量。系统运行过程中,根据电动机的功率来源,电动机输出到螺旋桨的功率可表示为:
Preq=(Pgen+Pbatt)ηT
(11)
式中:Preq表示飞行器功率需求;Pgen表示发电机输出功率;Pbatt表示储能电池的输出功率,可取正取负,负值时表示发电机输出功率为电池组充电;ηT表示功率传递效率(考虑线路损耗和AC/DC转化效率)。
根据图2中系统流程,燃油的消耗速度需满足发动机的功率输出,可表示为:
(12)

(13)
式中:SSOC(t)表示当前时刻电池组荷电状态值;SSOC0表示初始荷电状态值,充满电状态为1;ηb表示电池充放电效率;Qb表示储能电池初始容量;Ib表示电池组充放电电流;Ub表示电池组输出电压。
1.3 能源管理规则设定
能源管理的基本原则是基于飞行器动力需求,实时最优分配发电机与储能电池的功率输出。通过能源管理,可使串联式混合动力系统发动机运行在转矩速度特性曲线上的最佳工作点,从而提升系统的燃油经济性与飞行器的航程。
混合动力系统模糊控制原理如图4所示,飞行器提出功率需求,能源系统可满足整个飞行过程中供电功率需求。
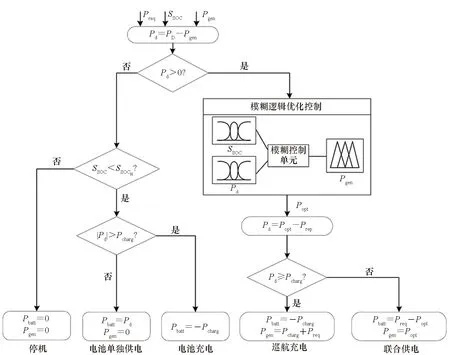
图4 混合动力系统模糊控制原理Fig.4 Fuzzy control principle of hybrid electric system
控制系统的输出变量为Preq、SSOC、Pgen。电池充电功率为Pcharg,其取值为Pcharg≤Pgen。当需求功率大于发动机-发电机的输出功率时,以模糊逻辑优化控制为控制核心,通过对SSOC、Pgen进行优化配置后,调节发动机的输出功率,形成发动机-发电机的优化输出功率Popt, 根据实时工况,满足联合供电、巡航充电等多工况功率需求的情况下实现能量的最大效率利用[14]。当需求功率小于发动机-发电机的输出功率时,则分为电池单独供电、电池充电、系统停机等工况。
模糊逻辑优化控制模块包含模糊控制输入与输出。本文引入T-S(Takagi-Sugeno)模糊系统作为控制器[15]。T-S模糊系统由日本学者Takagi和Sugeno于1985年提出[15],与传统模糊系统一样,T-S模糊系统通过模糊集描述语言输入,模糊规则由输入变量的函数决定。通过定义隶属度函数,为每个输入设计一个模糊集。本模糊规则库需要4个输入的瞬时值,即功率要求、最大发动机功率、最佳发动机功率和SSOC。发动机的最大功率与最佳功率可以用它们之间的差异进行换算,因此输入变量的数量可以减小到3个,相互取值为Preq、PICE、SSOC。整个模糊控制逻辑函数如图5~7所示。

图5 需求功率的模糊隶属度函数Fig.5 Fuzzy membership functions of required power

图6 发动机输出功率的模糊隶属度函数Fig.6 Fuzzy membership functions of ICE output power

图7 储能电池SSOC的模糊隶属度函数Fig.7 Fuzzy membership functions of battery′s SSOC
图5、图6中,针对需求功率Preq、发动机输出功率PICE分别设置了极小(QS)、小(S)、中等(M)、大(B)、极大(QB)等术语表示功率值。PICE的变化值与电池状态紧密结合,因此,在图7中,定义了5个术语来表示SSOC的值,即“QL”“L”“M”“H”和“QH”。“QL”“L”分别表示SSOC极低、低,如果额外的发动机-发电机功率可用,则需要对蓄电池充电。代表“中等”和“偏高”的“M”“H”是最重要的标准,当该隶属度达到1时,相应的SSOC数值就是理想的可持续值。“H”表示SSOC较高,充电不强制,除非功率需求低于最佳发动机功率。全荷电状态由“QH”表示,不需要充电。当SSOC低于20%时,蓄电池电压将急剧下降。因此,根据电池的安全放电深度,设置“L”为高于20%的SSOC。此外,选择50%作为理想的可持续SSOC,如果发动机出现故障,电池中50%的电能可以保证安全着陆。通过将模糊集“H”的范围分类为(55%,100%),可以获得发动机-发电机和电机功率相结合的全部优势。
此外,结合实际使用的器件参数,储能电池的使用寿命为不少于500次循环周期,电池充放电效率为90%,AC/DC系统效率为95%。
2 结果分析
以100 kg级的垂直起降飞行器为原型,将实际运行工况加载到串联式混合动力系统模型,研究飞行器运行功率特点、发动机-发电机输出功率特性、SSOC值变化规律等。仿真模型包括发动机、发电机、储能电池、电动机、模糊控制模块等。系统设计参数如表2所示。

表2 混合电推进系统参数设置
发动机的燃料消耗等位线如图8所示。通过发动机燃料消耗等位线,可以确定发动机最经济的工作区域,由参数匹配,可使发动机最佳性能区域落在最常用的工况范围内。根据图8中的燃料消耗等位线,以等效油耗率为优化目标,拟合出了最优工作点曲线,如图中红色曲线所示。在飞机巡航过程中,发动机的工作点可以通过对应的输出扭矩或转速寻找合适的最优油耗点。

图8 发动机燃料消耗等位线Fig.8 Fuel consumption contour of ICE
混合电推进系统主要用于飞行器的垂直起降与巡航平飞的灵活供电,飞行器飞行过程中的需求功率如图9所示。垂直起飞时,主要依靠旋翼提供推力,功率需求约为24.5 kW,持续时间约为60 s,之后逐渐转平飞,机翼可提供部分升力,需求功率也开始减小。约300 s后,飞行器进入巡航平飞阶段,需求功率为6.2 kW。巡航结束后,进入下降阶段,飞行器减速,因此需求功率更低,约为2.9 kW,持续时间为450 s。之后转为垂直下降阶段,飞行器需求功率增至22.3 kW。
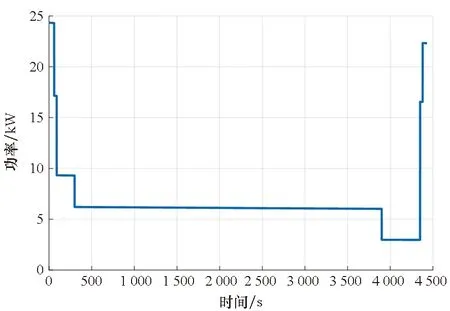
图9 系统需求功率曲线Fig.9 Aircraft system demand power curve
结合图9中功率变化曲线,获取了飞行过程中飞行器能量消耗曲线,如图10所示。

图10 系统能量消耗曲线Fig.10 Aircraft system energy consumption curve
由图10可知,在整个飞行过程中,总能量的消耗为8 kWh。如果全部采用储能电池用于能源供应,放电深度为80%,则需要10 kWh的储能电池。结合目前储能电池能量密度为200 Wh/kg,需要储能电池的质量为50 kg。因此,以储能电池作为飞行过程中的能源供给,则需要占用飞行器一半的起飞质量。考虑混合电推进能源系统,总质量不超过20 kg,可有效减少能源系统质量。后续发动机-发电机、储能电池的功率分配,则是在需求功率的约束下,依靠模糊规则进行优化配置。
在整个飞行过程中,发动机结合发电机提供主要的能源供应。对应的发动机、发电机的输出功率变化如图11、图12所示。超过10 kW的大功率输出时长约为180 s,随着飞行器进入巡航阶段,发动机、发电机的输出功率也随之降低,之后维持较长时间的低功率输出。在下滑阶段,飞行器利用重力势能减速下降,对发动机、发电机的功率需求进一步降低,维持在3 kW左右,持续时长约8 min,之后转为垂直降落。

图11 发动机输出功率Fig.11 ICE output power

图12 发电机输出功率Fig.12 Generator output power
整个飞行过程利用模糊控制原则进行功率分配,主要是为了降低发动机的燃油消耗率,提升能量的利用效率,对应的发动机比油耗变化如图13所示。对照图8中发动机燃料消耗等位线进行分析,发动机的燃油消耗率在大部分时间内处于最优状态,以较小的燃油消耗实现了飞行器的正常飞行,同时在应对功率需求较大的突变状态时,也能够寻找最优的燃油消耗率进行功率输出。由图13可知,在下滑阶段,发动机的燃油消耗率高于巡航阶段,主要是因为发动机在低功率输出阶段比油耗不一定低,此时的能量利用效率较低。
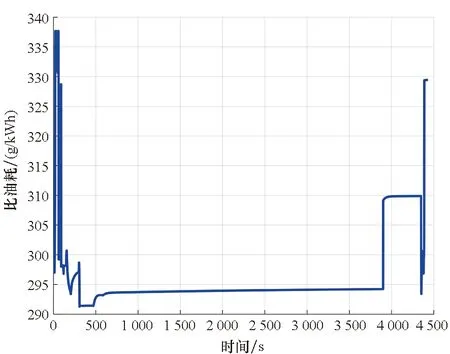
图13 发动机比油耗Fig.13 Specific fuel consumption of ICE
储能电池主要是辅助发电机供电,在起飞阶段进行大功率供电,巡航阶段进行充电。充电完成后,保持满电状态,为飞行器降落进行供电准备。整个飞行过程中,储能电池放电、充电功率变化如图14所示。
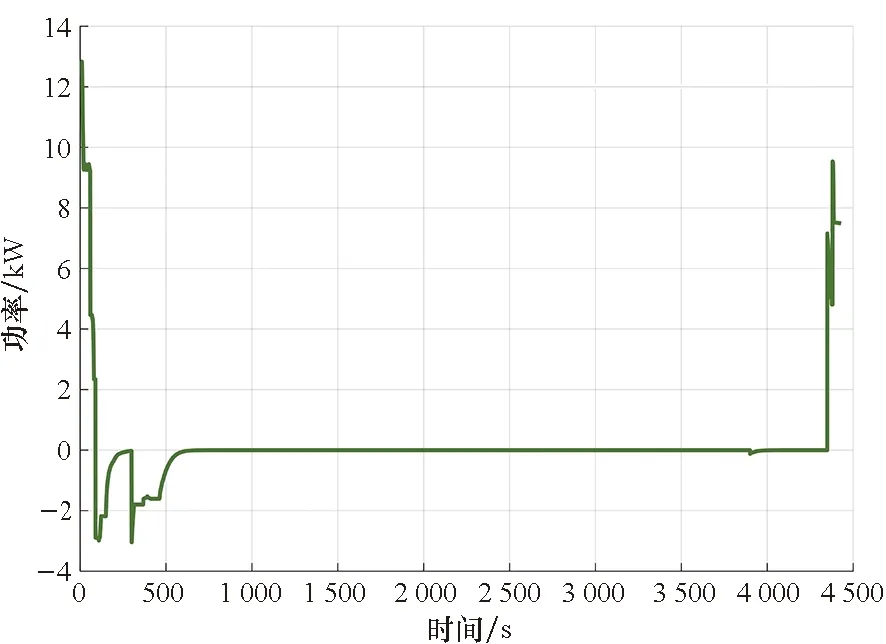
图14 储能电池充放电功率Fig.14 Charge-discharge power of battery
储能电池的SSOC变化如图15所示,起飞阶段进行急剧放电,直至放电截止状态。之后进行充电,SSOC最高维持在0.82的状态,在降落阶段再次进行放电。
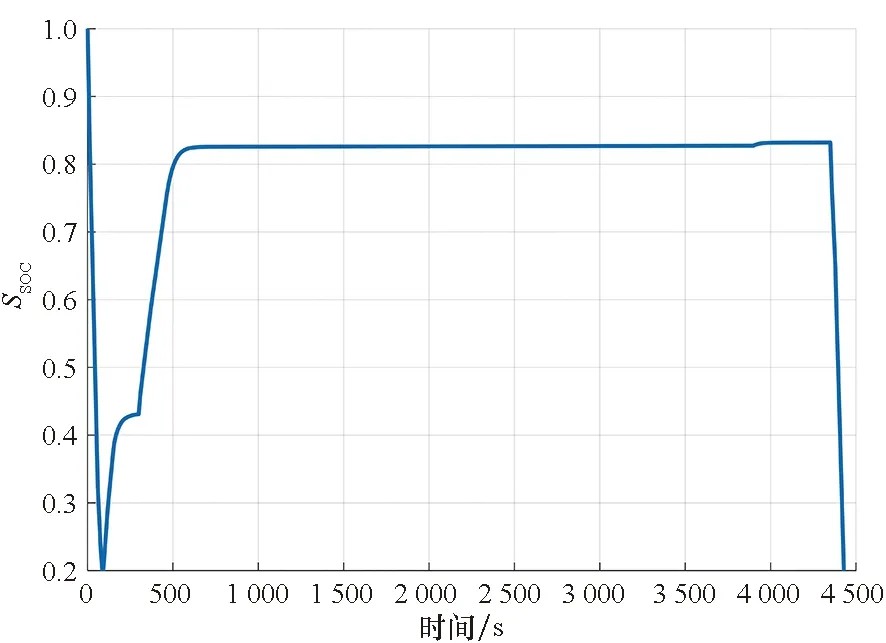
图15 储能电池SOC变化Fig.15 State of charge of battery
储能电池在整个飞行任务过程中主要是起能量补充与平衡的作用,充分利用了储能电池充放电功能,在飞行器垂直起飞功率需求大时,弥补了发动机-发电机的功率不足,在巡航飞行过程中,吸收了发动机-发电机的盈余电量,为垂直降落存储了电量,从而有效提升了能源系统能量利用的效率。
整个仿真飞行过程中,利用模糊控制原则对发动机、储能电池功率输出进行优化分配,使发动机的燃油消耗率在大部分时间内处于最优状态,降低了发动机的燃油消耗率,提升了能量的利用效率。在总时长约为1.2 h的飞行过程中,发动机约有1 h的时间工作在比油耗最低的区域,此时燃油经济性最高,有效提升了飞行器的续航里程。
3 结论
本文针对100 kg级垂直起降转平飞的飞行器全包线功率需求,开展了基于模糊控制的混合动力系统能源管理研究,通过数值仿真,得到如下结论:
1)垂直起降转平飞的飞行器,在功率需求方面具有较大的跳变,垂直起降时的功率约是巡航平飞的4倍,而混合动力系统融合了燃油动力系统的高能量密度与高功率密度,可适用于飞行器的垂直起降与巡航平飞的灵活供电,且能有效提升航程与航时。
2)运用模糊控制算法可实现混合动力系统能源的高效管理,在充分利用储能电池充放电的条件下,实现了对发动机燃油消耗率的优化控制,提升了燃油的利用效率,同时也满足了飞行器系统的功率需求。
后续工作将开展针对垂直起降飞行器混合动力系统的试验研究,结合理论仿真数据与试验数据,提升混合动力系统的实用性。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
煤气与热力(2021年6期)2021-07-28
小哥白尼(野生动物)(2021年3期)2021-07-21
通信电源技术(2018年3期)2018-06-26
电子制作(2018年2期)2018-04-18
能源(2017年12期)2018-01-31
电源技术(2016年2期)2016-02-27
小朋友·快乐手工(2015年5期)2015-06-06
汽车维护与修理(2015年6期)2015-02-28
汽车维护与修理(2015年2期)2015-02-28