基于超螺旋算法的永磁同步电机变结构自抗扰控制设计与验证
2023-12-23 06:14余尚尚杨明晖李生权
江苏科技大学学报(自然科学版) 2023年5期
李 娟,余尚尚,陆 浩,杨明晖,李生权
(扬州大学 电气与能源动力工程学院,扬州225127)
目前,主流的永磁同步电机调速控制技术主要有矢量控制技术(field-oriented control,FOC)和直接转矩控制(direct torque control,DTC).DTC技术因其快速性、准确性、鲁棒性以及简单的坐标变换,提升了控制系统的运算速度[1-2].
针对DTC所存在磁链转矩脉冲动大和低速时调速性能不理想的问题,各类不同的优化方案也由此产生.文献[3]在传统的DTC的开关表中增加零电压矢量,提出了将零矢量用于逆变器开关控制表的新型方案,从而提高了转矩响应能力和速度响应特性.但由于可供选择的电压矢量仍然有限,并不能完全消除扰动.文献[4]采用了传统的滑模控制的方法以减少系统中的磁链和转矩脉动,效果明显.但由于滑模控制器存在着开关不连续和抖振问题,导致控制系统的脉动问题很难消除.同时,速度控制器大多采用PI等线性控制器,存在着响应速度和超调量难以兼顾的缺陷.以及传统PI调速控制器本身具有的相位滞后效应,从而限制了DTC快速响应的优点.
针对这些问题,文中对传统DTC进行了改良.首先,在转速环上采用了变结构的自抗扰控制器提高系统的响应速度和抗扰能力;其次,提出了一种基于死区补偿的低通滤波型定子磁链观测器以改善传统观测器的幅值和相位偏差的问题;最后,设计基于超螺旋滑模(super-twisting sliding mode,STSM)算法的控制器,以减弱系统中存在的磁链与转矩脉冲.
1 PMSM数学模型
d-q坐标系下电磁转矩方程为:
(1)
式中:ψs和ψf分别为定子磁链和转子磁链;δ为负载角;Ld、Lq为d-q轴上的定子电感;Pn为极对数.PMSM的定子电感满足Ld=Lq=Ls,电磁转矩方程可简化为:
(2)
在定子磁链大小一定时,可以通过调节来改变电磁转矩Ts大小.因此可得到d-q坐标系下定子电压方程为:
(3)
式中:ud、uq为d-q轴上的定子电压;id、iq为d-q轴上的定子电流;ψd、ψq为d-q轴上的定子磁链;Rs为定子电阻;wm为电机的机械角速度.得到d-q坐标系下定子磁链方程为:
(4)
进一步得到PMSM系统的运动方程为:
(5)
式中:J为转动惯量;TL为负载转矩;B为阻尼系数.
2 基于DTC的PMSM调速设计
2.1 改进型的定子磁链观测器
基于电压模型的定子磁链观测器基本采用如式(6)的理想积分器来对磁链进行观测.该方法存在着直流漂移和积分饱和的问题.
(6)
其极坐标形式为:
(7)
式中:Us、is、ψs、es分别为静止轴系下电机定子电压、电流、磁链及感应电势的空间矢量;∠es和|es|分别为感应电动势的相角和幅值;we为定子电角频率.由于上述理想积分器存在的缺陷,在实际中常常将高通滤波器与积分器串联,构成一个低通滤波器,以达到消除感应电动势中直流分量的目的.低通滤波器的传递函数为:
(8)
式中:wc为低通滤波器截止频率;s为Laplace算子,则定子磁链的极坐标表达为:
(9)
由式(9)可见,观测值ψs′与真实值ψs相比,仍然存在相位和幅值的误差.因此在低通滤波器后加入一个补偿环节,以解决幅值减小与相位滞后的问题,则定义补偿环节为:
ψs′H=ψs
(10)
式中:
(11)

则补偿环节H可以改写为:
(12)
经过幅值与相位补偿的磁链观测器得到的定子磁链观测值则可表示为:
(13)
根据α-β坐标系下的定子磁链观测模型,将式(13)改写为:
(14)
基于此,可得到幅值与相位补偿的定子磁链观测器为:
(15)
式中:wc=kwe.根据文献[5]中的分析,系数k的最优范围为:0.2~0.3.当电机启动初始阶段,we的值接近于零,此时可能因定子频率的估计误差导致过度补偿,因此须要通过加入限幅器对截止频率we设置下限.图1为改进后的磁链观测器结构.为了提高转矩和磁链控制精度,文中采用空间矢量脉宽调制(space vector pulse width modulation,SVPWM)技术精确补偿转矩和磁链误差,减小传统DTC系统中因电压矢量切换导致的抖振问题.
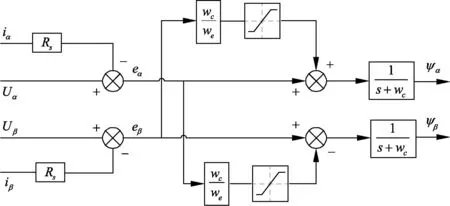
图1 改进的定子磁链观测器结构

(16)
式中:Udc、Ts和Td为直流母线电压,开关周期和死区时间.sign(·)为符号函数,当定子三相电流在过零点时的极性为正时,取值为1,电流极性为负时,取值为-1.为了提高定子磁链观测值准确度,考虑误差电压后,定子电压在两相静止坐标系中的表达式为:
(17)
将式(16)带入电压型的磁链观测器,可得磁链观测器的误差为:
(18)
再将式(18)代入电磁转矩计算公式中,得到转矩误差为:
(19)
基于式(18)和(19)所得到的磁链观测误差和转矩误差,就可以在定子反电动势中对Δuα、Δuβ进行补偿.定子反电动势为:
(20)
根据以上分析建立的基于死区补偿的低通滤波型定子磁链观测器的结构如图2.

图2 基于死区补偿的定子磁链观测器结构
2.2 基于STSM的转矩和磁链控制器设计
STSM是一种二阶滑模方法,能够使得系统运动轨迹在有限时间内按照螺旋线的轨迹收敛到原点[8-9].
为了简化问题,基于单输入非线性动态系统[10]进行分析:
(21)
式中:x为状态变量;u为控制输入;c(x,t)为系统的输出函数,称之为滑模变量;a(x,t)、b(x,t)是与状态变量x相关的不确定函数.
设计STSM控制算法的控制律为:
(22)
式中:kP、kI是控制器的设计参数,且均大于0;sign(s)为符号函数;滑模变量s=y*-y;u1为切换控制,实现对不确定性和外加干扰的鲁棒控制.
首先证明STSM控制器的稳定性.
STSM控制器在有限时间内收敛必须满足式(23)与式(24):
(23)
式中:AM为A的最大值;BM为B的最大值;Bm为B的最小值.其中A和B是式(24)中所定义的函数,与状态变量相关.
(24)
对磁链幅值连续求导,则可推导得到定子磁链微分方程为:
(25)
式(25)满足式(23),可得磁链控制器的参数值kP和kI,使磁链能够在有限时间内收敛.因此可以设计定子磁链的滑模面函数:sψ=ψs*-ψs.进一步根据式(22)设计磁链控制器为:
(26)
对电磁转矩进行连续求导,得到电磁转矩微分方程为:
(27)
式(27)满足式(23),可得转矩控制器的参数kP和kI,于是电磁转矩能够在有限时间内收敛.
在此基础上设计设计电磁转矩的滑模面函数:sT=Tθ*-Tθ.进一步根据式(22)设计电磁转矩控制器为:
(28)
2.3 变结构自抗扰速度控制器设计
自抗扰控制技术(active disturbance rejection control,ADRC)[11],主要由跟踪微分器(tracking differentiator,TD)、扩张状态观测器(extended state observer,ESO)、非线性状态误差反馈控制律(nonlinear state error feedback law,NSEFL)3部分组成.ADRC方法将系统的外部扰动以及内部未知扰动视作总扰动,并将其定义成一种新的状态——扩张状态,通过估计和抵消进行动态补偿[12].ADRC的核心部分ESO,其具有较强的抗干扰能力,而变结构控制具有结构简单,响应快速,鲁棒性强等特点.因此在转速环将变结构思想引入ESO环节,设计变结构的自抗扰速度控制器,以提高速度环控制器的性能.
将式(5)改写成速度的微分形式:
(29)

(30)
基于式(30)进行变结构设计,得到变结构ESO为:
(31)
式中:z1为对x1的估计;z2为对x2的估计;e1=z1-x1为观测器的误差;z2是与z1有关的函数.再令:
(32)
对式(31)设计滑模面为:
s=ce1+e2
(33)
式中:c为滑模面增益.对式(33)求导,得:
(34)
f(e1)=-ce2-ηsign(s)
(35)
下证系统稳定性.
(36)
则:
(37)

改进后的变结构ADRC速度控制器结构框图如图3.

图3 基于变结构自抗扰控制算法的DTC系统框图
3 实验验证
为了验证文中提出的控制策略的有效性和优越性,搭建实验平台进行试验分析.实验平台由上位机、DSP开发板、IPM智能功率板、永磁同步电机、仿真器、测功机、直流稳压稳流电源模块组成.实验所用的表贴式PMSM的参数如表1.

表1 永磁同步电机参数
采用3种控制器做对比,设置固定步长为0.001 s.速度环中采用PI参数为kPC=0.5,kIC=0.05;采用ADRC参数为p=1 000,b=4 700,h=5×10-5,kP=3.8,变结构ADRC的参数与ADRC相同.
在给定转速为1 000 r/min,在空载的情况下,基于STSM的变结构自抗扰控制和ADRC、PI控制的转速、电磁转矩和磁链幅值曲线如图4~6.

图4 未加载情况下的转速曲线对比
从图4中可以看出速度环采用ADRC算法和变结构ADRC算法的系统在10,20,30 s时刻的转速均不存在超调.以10 s时刻为例,速度环采用ADRC算法的转速从0加速到1 000 r/min整个过程持续1 s左右,速度环采用变结构ADRC算法的转速从0加速到1 000 r/min整个过程持续0.5 s左右.对1 000,1 500,2 000 r/min过程的转速信号进行局部放大,可以发现ADRC以及变结构ADRC与PI相比,电机转速波动更小,稳定性更高.从图5,6可以看出,ADRC与变结构ADRC系统的电磁转矩和磁链幅值在10,20,30 s时刻转速突变时的信号突变更小.
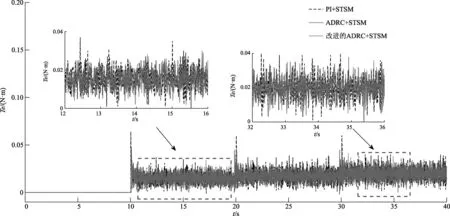
图5 未加载情况下的电磁转矩曲线对比
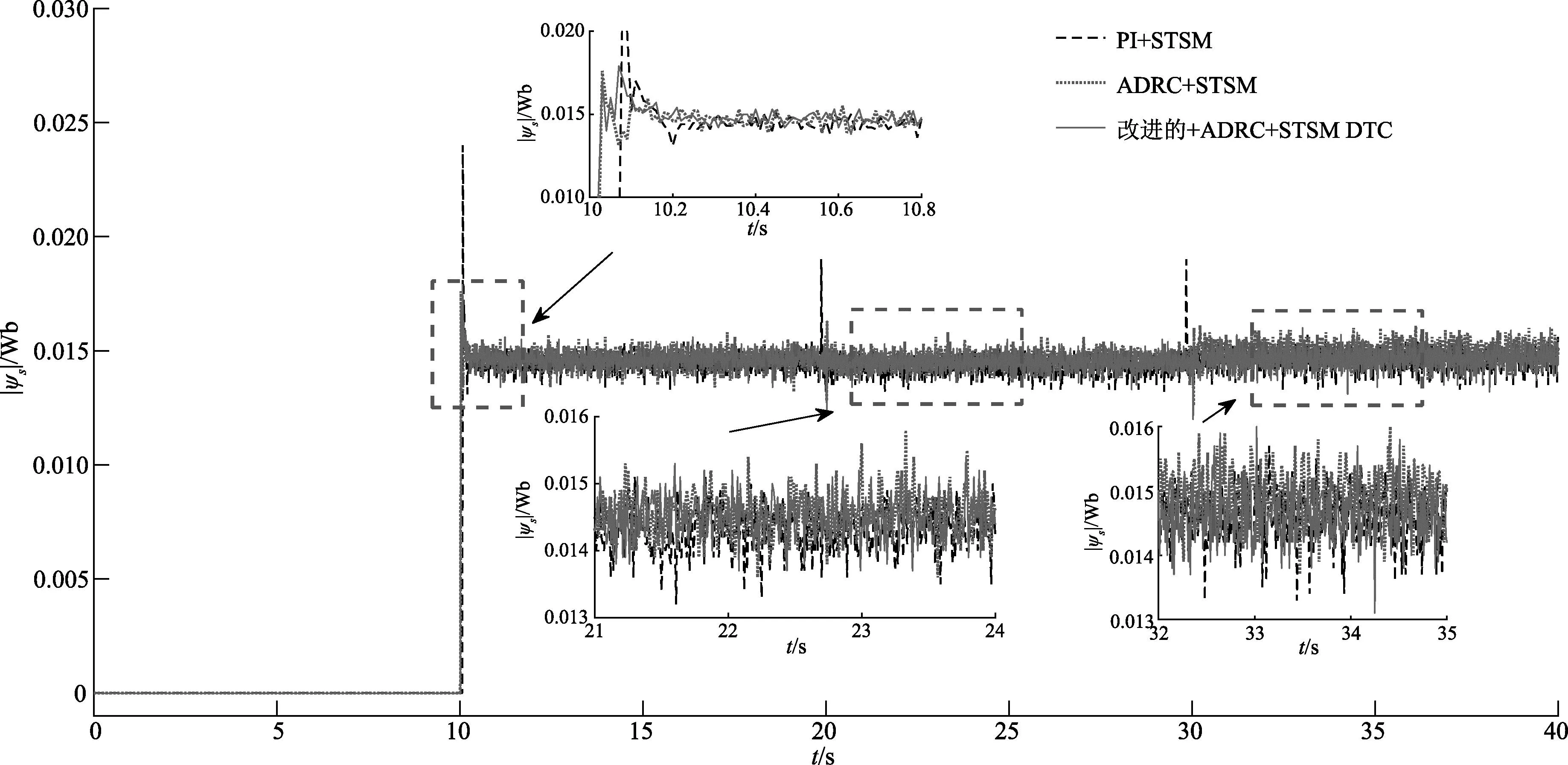
图6 未加载情况下的磁链幅值曲线对比
在恒定1 000 r/min 且有负载突变的仿真情况下,在t=20 s时突加0.3 N·m负载,t=30 s时突减去负载.转速曲线和电磁转矩变化曲线如图7和8.从图7可以看到电机在1 000 r/min运行状况下突加负载和突减负载时,采用ADRC与变结构ADRC的两个控制系统转速信号波动较小,其中ADRC的转速下降至960 r/min,经过约0.4 s恢复至给定转速.变结构ADRC的转速下降至975 r/min,经过约0.5 s恢复至给定转速.当负载卸去时,ADRC的转速信号上升至1 050 r/min,经过约0.5 s恢复至给定转速,变结构ADRC的转速信号上升至1 030 r/min,经过约0.4 s恢复至给定转速,两者均有着较好的抗干扰性以及动态响应能力.从图8可以看出,在5,10 s时刻,ADRC与变结构ADRC的两个控制系统的超调量更小,在突加负载时能够更快的达到稳态.

图7 负载情况下的转速曲线对比

图8 负载情况下的电磁转矩曲线对比
4 结论
(1) 以表贴式永磁同步电机为研究对象,针对传统DTC系统存在的磁链、转矩脉动大的问题,首先引入了基于死区补偿的低通滤波型定子磁链观测器,提高了观测精度.在此基础上,将磁链环和转矩环上的滞环控制器改进为超螺旋滑模控制器,并在速度环引入了变结构自抗扰控制器.
(2) 仿真和试验结果表明,基于改进型的DTC系统能够有效的抑制磁链、转矩脉动.除此以外,系统的响应速度和抗干扰能力也有了显著的提升,整体性能得到了改善.
猜你喜欢
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
电测与仪表(2016年10期)2016-04-12
铁道科学与工程学报(2015年5期)2015-12-24
深空探测学报(2015年3期)2015-12-07
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年19期)2015-04-09
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04