基于神经网络逆模型的污水pH 值内模控制策略
2023-12-26 07:23鲍立昌章家岩冯旭刚王正兵魏新源
重庆大学学报 2023年12期
王 胜,鲍立昌,章家岩,冯旭刚,徐 帅,王正兵,魏新源
(安徽工业大学 电气与信息工程学院,安徽 马鞍山 243032)
中国水资源严重短缺,人均水资源占有量仅为世界平均水平的1/4,因此,加强污水治理和循环利用对于保护水资源和实现可持续发展具有重要意义[1-3]。在工业污水处理过程中,酸碱度(pH 值)的控制是非常重要的环节,保证精准控制,是污水处理后续工艺流程安全可靠运行以及水质达标的前提条件。然而在污水处理过程中,当pH 值在中和点附近时,中和反应呈现高度敏感性,加入微量的中和剂就会引起pH 值的大幅跳变,且中和反应过程易受环境、温度、生物发酵等多方面不确定因素的干扰[4-5],所以对pH 值进行控制是污水处理行业的一项技术难题[6]。
pH 值调节过程涉及的化学反应机理主要是酸碱中和反应。近些年对酸碱中和反应pH 值控制的研究引起了学者关注。Mota 等[6-7]提出了应用自适应神经模糊推理系统架构建立代表酸碱中和过程的预测模型,并根据神经网络准确性和复杂性相互矛盾的准则,将pH 中和过程表示为多目标优化问题。但由于神经网络输出和节点权值映射间存在非线性,导致系统局部极小值问题未得到解决。Zhang 等[8]将未建模动态的数据驱动补偿与多步超前最优控制相结合,采用了一种新的PID 控制方案应用于纸浆中和过程的pH 值控制。在这种新的PID 控制方法中,中和过程的实时测量数据和历史数据得到了充分应用。但是动态历史数据库的更新存在一定滞后,使系统很难达到实时在线控制的要求。Vatankhah 等[9-11]将非线性预测控制应用于pH 的中和过程研究中,在数学模型的基础上搭建了神经网络预测模型并融入粒子群算法,解决了BP 神经网络局部最优的难题。但由于该神经网络的训练样本数据量较大,待寻优参数多,导致系统的收敛速度较慢。
综上所述,虽然已有一些方法对中和反应的pH 值控制进行研究,但未能有效解决系统的强干扰和模型参数易变问题。为此,笔者提出基于内模控制和神经网络逆模型相结合的优化控制策略,设计滤波器提高系统鲁棒性,在MATLAB 仿真验证的基础上,以火力发电锅炉冲渣除灰循环水处理系统为对象进行实际应用,达到了较好应用效果。
1 pH 中和反应机理建模
工业污水处理过程中,中和剂的添加量是控制pH 值的关键因素。工程上通常依据物质守恒定律和化学平衡定律,采用连续搅拌反应釜系统(continuously stirred tank reactor,CSTR)的pH 中和过程作为研究对象的动态模型[12-13]。
连续搅拌反应釜系统如图1 所示,当流入反应池的污水呈酸性时,用碱性中和剂调节其pH 值;当流入反应池的污水呈碱性时,用酸性中和剂调节其pH 值。为方便阐述pH 中和反应机理,设流入反应池的污水呈碱性,对应去用酸性中和剂调节其pH 值。图中F1、F2分别为酸性中和剂的流量和碱性污水的流量,其浓度分别为C1、C2,Xa为流出酸的总浓度,Xb为流出碱的总浓度,V为连续搅拌反应釜中溶液的体积,n为搅拌机转速。

图1 连续搅拌反应釜系统Fig. 1 Continuous Stirred Reactor System
设定的CSTR 中处处等温且物料完全混合,排除其他生物或物理化学作用对pH 的影响,则整个反应釜系统中碱的变化量等于污水流入反应釜中碱的总量和反应釜中流出的碱的总量之差,酸的变化量等于向反应釜中所添加的中和剂中的酸总量与反应釜中流出的酸总量之差。即有
整个系统中,酸性中和剂的流量F1即为操纵量u,污水pH 值作为系统的输出(即被控变量),中和剂的浓度C1为系统的扰动量,结合式(1)和式(2)可得出系统的动态控制模型如下
令y=Xa-Xb,可以将式(3)简化为
被控对象的模型可以近似离散化为
至此可得处理后污水pH 值
式(5)、(6)中:T为采样周期(s);d(k)为系统干扰;Kw= 10-14为纯水在25 ℃下的电离平衡常数。
2 神经网络内模控制方案设计
根据污水处理系统pH 值的控制要求,设计了图2 所示的控制方案。基本环节由正向模型、逆向模型、滤波器和时延模块等部分组成。其中,正向模型和逆向模型由RBF 神经网络辨识实现,逆向模型通过内模控制器来实现pH 值被控对象的逆,有效解决pH 值控制系统的强干扰问题。图中选择中和剂的流量u作为操作变量,反应釜对象的pH 值变量作为被控变量y,TDL 为神经网络采集数据的时延模块,滤波器能提高控制系统的鲁棒性。下面将分别对RBF 神经网络正、逆向模型辨识和内模控制器进行设计,并将二者有机结合,实现污水处理pH 值的优化控制策略[14]。
2.1 正、逆向模型的建立
模型辨识是识别被控对象输入输出之间关系的动态特性[14],为了提高内模控制系统中正向模型的精确度,并使内模控制器尽可能接近正向模型的逆模型,采用神经网络的方法对内模控制系统的正向模型和控制器模型进行正、逆模型辨识。模型辨识的结构如图3 所示。

图3 正、逆向模型辨识结构Fig. 3 Identification structure of forward and reverse models
神经网络辨识的pH 值非线性被控对象用非线性离散差分方程可以表示为
式中:n是输出时滞;m是输入时滞;u是对象输入;y是对象输出。假设RBF 的多输入向量为
则RBF 网络中高斯基函数zi(第i个隐节点的输出)为
式中:Ci为网络第i个节点的中心向量;ri为网络基宽向量中的第i个值;p为隐节点个数。
RBF 网络的输出为
其中:wi是网络隐层到输出层的权值;M是网络输出节点的个数。
并定义目标函数
在内模控制正向模型的建立过程中,采用u(k- 2),u(k- 3),u(k- 4),y(k- 1)和y(k- 2)作为RBF 神经网络的输入,ym(k)作为RBF 神经网络的输出。通过最小化目标函数来不断修正RBF 网络中的连接权值,使得正向模型的输出ym不断逼近实际输出y,从而实现正向模型的辨识。
逆向模型的训练结构除输入输出外,其余和正向模型相同。在逆向模型的建立过程中,采用u(k- 4),u(k- 3),r(k- 1),r(k- 2)和r(k- 3)作为RBF 神经网络的输入,̂(k)作为RBF 神经网络的输出。利用设定值r(k)和正向模型输出ym(k)的差值e2来修正RBF 网络的连接权值,使得逆向模型的输出̂(k)逐渐逼近被控对象的实际输入u(k),实现逆向模型的动态辨识。
2.2 pH 值内模控制架构
内模控制建立在被控对象正、逆向模型的基础上,把被控对象和它的近似数学模型并联,取数学模型输出与实际对象输出的差值作为误差信号,反馈到内模控制器的输入端,并通过滤波器来抑制控制系统受到干扰或模型参数变化时出现的反馈量波动。内模控制架构框图如图4 所示。

图4 内模控制架构Fig. 4 Internal Mode Control Architecture
图4 中,r(s)为系统的输入(污水处理设定的pH 值),y(s)为系统的输出,G(s)为污水pH 值被控对象,C(s)是内模控制器,Gn(s)是被控对象模型,d(s)为干扰,Gf(s)为滤波器。
图4 虚线框内结构的传递函数简记为GF(s)
则整个系统中输入r(s)与输出,干扰d(s)与输出之间相互独立,传递函数如下
通过内模控制架构可以得出系统的输出y(s)为
由式(13)可知,在pH 值被控对象数学模型精确且存在逆模型的情况下,即
此时系统的输出能够跟随系统的输入值,且不受到任何干扰的影响
2.3 基于RBF 神经网络的内模控制器设计
针对图2,由式(4)和pH 中和反应的大滞后性可知被控对象G为1 阶时延的非线性系统,将式(5)被控对象的离散化模型简写成
式中:y为系统的输出;u为系统的输入;n和m分别是输出时滞和输入时滞。
1)G的模型Gn
G的模型Gn由RBF 神经网络采用并联结构辨识得到
2)神经网络内模控制器设计
由逆向模型辨识可知,可逆且为1 阶时延的非线性系统G,它的逆模型由RBF 神经 网 络的串-并 联 结构实现。根据式(15),逆模型的输出为
此时,内模控制器C是对象G的逆模型Gn-1,滤波器Gf的输出f即为C的输入,将
代入,可得到内模控制器C为
3)滤波器设计
虽然希望设计控制器的被控对象模型与实际对象模型尽可能相似,但现实情况中系统运行时模型不匹配和扰动往往是存在的,从而导致正向模型和实际对象模型存在一定误差。考虑到内模控制器的可实现性,在进行控制器设计时内模控制器C则是被控对象G的最小相位特征部分的逆模型[15]。为了提高系统鲁棒性,可在控制器前端加入低通滤波器Gf,选取简单有效的一阶滤波器
其离散形式为
式中,h为滤波器的可调时间常数,也是内模控制器的唯一参数,可以通过调节h增强控制系统的稳定性和鲁棒性,h越大,系统鲁棒性和稳定性越好,但是系统响应会减慢。
4)系统分析
理想情况下,C=Gn-1,则GG=z且G=Gn,图2 所示系统pH 值控制方案的闭环z传递函数为
此时系统相当于开环。
滤波器输出为
把式(18)代入上式可得
至此,滤波器的输出f所对应的z变换为
其中,ym(z)表示pH 值被控对象G输出上一步的预报值,从而对象的输出时滞得到了一定的补偿。
3 仿真分析
污水处理中和反应过程类似于强酸强碱反应系统,采用式(5)的近似化离散模型作为被控对象的模型,利用MATLAB 软件进行运算仿真,系统参数值的选择如表1 所示,pH 设定值为7.5。

表1 过程对象模型参数Tab.1 Process object model parameters
1)RBF 神经网络训练仿真。在确定对象模型基础上首先对正向模型进行RBF 训练,要求训练精度达到0.000 1,然后再进行逆向模型训练。RBF 网络权值及高斯函数参数权值的初始值均取[-1,1]间的随机值,学习速率为0.1,加载样本数据后,正向和逆向模型的网络训练误差如图5 所示。从图中可以看出,正向模型和逆向模型分别在训练到第135 次和第98 次时误差达到了0.000 1 级别精度,说明设计的RBF 正向模型和逆向模型的训练效果和收敛效果都很好,误差下降也很快。

图5 正向和逆向模型训练误差图Fig. 5 Training Error Diagram of Forward and Reverse Models
2)内模控制器选取参数仿真。神经网络内模控制采用一阶滤波器Gf(s),h是内模控制的
唯一参数,分别取h= 0.6,h= 0.8,h= 1.0,控制系统的阶跃响应如图6 所示。
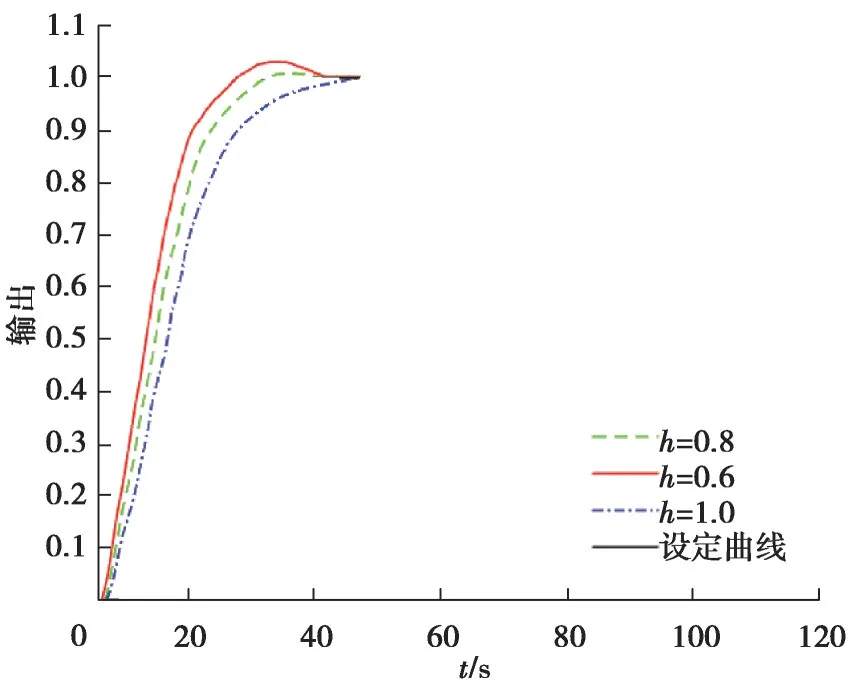
图6 不同滤波器参数下系统响应Fig. 6 System response under different filterparameters
从图中可以看出,h越大,系统稳定性越好,但是响应越慢,h过小,易引起模型参数变化时系统超调过大,在系统稳定性和响应速度之间做折中,设计取h= 0.8。
3)优化控制策略抗干扰仿真。在常规PID 控制系统中,根据工程经验值以及多次调参可得PID 参数为KP=0.56,KI=248,KD=74。为验证优化控制策略的抗干扰效果,在系统运行到180 s 时加入幅值为20%的阶跃扰动信号,比较带滤波器的神经内模控制策略、不带滤波器的神经内模控制策略和常规PID 控制策略的抗干扰性能,其中,3 种控制策略下阶跃扰动信号的时长均取30 s,结果如图7 所示。从图7 可看出:扰动信号加入后,带滤波器的神经内模控制策略超调量为14.7%,调节时间为70.2 s;不带滤波器的神经内模控制策略超调量为22.7%,调节时间为88.3 s;常规PID 控制策略超调量为28.5%,调节时间为86.1s。由此可知,带滤波器的神经内模控制策略抗干扰能力明显优于不带滤波器的神经内模控制策略和常规PID 控制策略。

图7 3 种控制策略扰动仿真波形Fig. 7 3 kinds of control strategy disturbance simulation waveform
4)多设定值仿真。污水处理pH 值控制要求系统在不同设定值下都具有良好的控制性能,将系统设定值分别取为7.5、6 和9,比较常规PID 控制策略、不带滤波器的神经内模控制策略和带滤波器的神经内模控制策略的动态响应特性,结果如图8 所示。从图8 可以看出:当设定值为7.5 时,3 种控制策略下超调量分别为21.3%、12.1%和3.3%,调节时间分别为70.2 s、67.3 s 和54.7 s;设定值从7.5 跳变为6 时,3 种控制策略下的超调量分别为5.8%、3.2%和0.8%,调节时间分别为49.4 s、44.3 s 和40.7 s;设定值从6 跳变为9 时,3 种控制策略下的超调量分别为7.8%、3.9%和1.7%,调节时间分别为59.6 s、50.1 s 和42.5 s。上述分析说明带滤波器的神经内模控制策略在不同设定值下的动态响应性能均优于不带滤波器的神经内模控制策略和常规PID 控制策略。

图8 3 种控制策略多设定值仿真波形Fig. 8 multi-setting value simulation waveform under 3 kinds of control strategies
5)系统鲁棒性仿真。在表1 对象模型参数(实验参数一)仿真的基础上,将C1和C2分为调整为0.04 mol/L 和0.8 mol/L(实验参数二)进行仿真以验证模型参数变化时系统的鲁棒性,如图9-10 所示。从图9 可看出:在实验参数一下,带滤波器的神经内模控制策略超调量为9.3%,调节时间为51.6 s;不带滤波器的神经内模控制策略超调量为14.7%,调节时间为129.1 s;常规PID 控制策略超调量为26.7%,调节时间为165.2 s。从图10 可看出:在实验参数二下,带滤波器的神经内模控制策略超调量为9.1%,调节时间为54.2 s;不带滤波器的神经内模控制策略超调量为17.3%,调节时间为200.3 s;常规PID 控制策略超调量为26.4%,调节时间为218.9 s。以上分析表明带滤波器的神经内模控制策略在模型参数变化时具有更强的鲁棒性。

图9 实验参数一下的3 种控制策略仿真波形Fig. 9 3 kinds of control strategy simulation waveforms
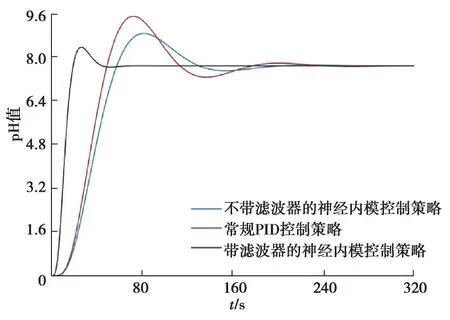
图10 实验参数二下的3 种控制策略仿真波形Fig. 10 3 kinds of control strategy simulation waveforms
4 工程应用
为检验系统实际应用效果,将研究提出的神经网络内模控制策略应用于某电厂300 MW 火电机组燃煤发电锅炉冲渣除灰循环水处理系统。在该处理系统中,碱性冲灰水经过初步过滤净化后流入灰坝房的反应池内进行中和反应,反应池内pH 计实时检测污水的pH 值,神经网络内模控制器利用检测到的pH 值及污水流量计算出中和剂酸的流量,进而控制中和剂的流量阀。系统设计以生产管理层作为中央操作站,逻辑控制层采用s7-300PLC 作为控制器,对现场采集到的数据进行处理,生产现场层负责污水处理过程中现场信号的采集和输出,操作监控层则负责整个系统运行状况的监控、控制参数的给定或调整以及系统运行信息的记录等功能。整个控制系统拓扑结构如图11 所示。

图11 控制系统结构图Fig. 11 Control System Structure Diagram
图12、13 是1 h 内分别采用常规PID 控制策略和神经网络内模控制策略的pH 值实时曲线。由图12、13可以看出,采用常规PID 控制的pH 值大致稳定在7.5 左右,波动范围在[-0.3 0.3]之间。而采用神经网络内模控制策略的pH 值波动范围在[-0.2 0.2]之间,系统稳态特性得到较大改善。为验证神经网络内模控制策略的抗干扰性能,分别在2 种控制策略下人为施加10%的阶跃干扰,由曲线图可知,当系统受到干扰时,常规PID控制系统的超调量为14.2%,神经网络内模控制系统的超调量为9.3%,系统波动所带来的超调量比常规PID控制方式小。由上述分析可以得出,采用神经网络内模控制可以提高pH 值的控制精度,并具有较强抑制干扰能力,可进一步提高发电锅炉工业污水pH 值控制的准确性和抗干扰性。

图12 pH 值的PID 控制实时曲线Fig. 12 pH value real-time curve of PID control
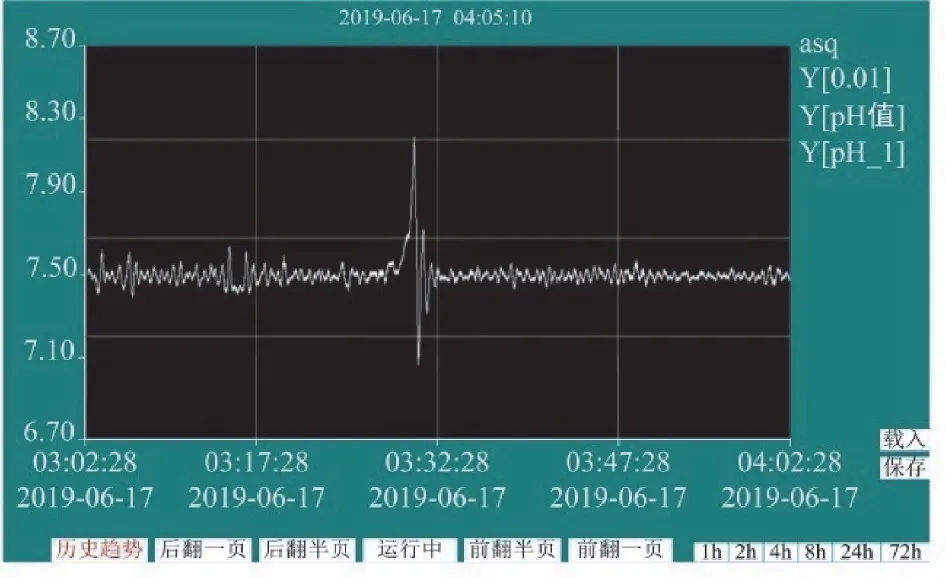
图13 pH 值的神经网络内模控制实时曲线Fig. 13 Real-time curve of pH value neural network internal model control
5 结论
针对污水处理过程中pH 值控制的强干扰、模型参数易变等问题,设计了基于神经网络逆模型的内模控制优化方案。该方案采用RBF 神经网络实现对被控对象正向模型和逆向模型的辨识,此时内模控制策略的输出紧跟系统的输入,不受任何干扰影响,通过在系统中插入低通滤波器来提高对象模型参数变化时系统的鲁棒性。仿真结果表明:和常规PID 控制及不带滤波器的神经内模控制策略相比,研究所提出的控制策略具有更强的鲁棒性和抗干扰能力。工程应用表明:采用研究控制策略后,pH 值控制偏差在±0.2 以内,有效提高污水处理过程中pH 值控制的精度和系统稳定性。
猜你喜欢
音乐天地(音乐创作版)(2022年1期)2022-04-26
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
四川电力技术(2015年5期)2015-12-19
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年21期)2015-04-09
应用技术学报(2014年3期)2014-02-28