考虑驾驶风格的心理场效应分析及跟驰行为建模
2023-12-28 02:12胡春燕赵梓旭曲大义
青岛理工大学学报 2023年6期
胡春燕,赵梓旭,曲大义,*,王 韬,宋 慧
(1.青岛理工大学 机械与汽车工程学院,青岛 266525;2.青岛同道规划设计研究院有限公司 ,青岛 266000)
心理场(Psychological Field)理论由心理学家库尔特·勒温[1]提出,心理场是人的心理与客观存在的物质世界形成的一种人为场,用以研究人的意图、情绪、意志等心理动力要素。车辆驾驶人、行人等交通参与者的心理动力对交通态势具有关键影响作用,因此海内外已有学者应用心理场方法对交通领域中的诸多问题进行了研究。
陶鹏飞[2]通过分析驾驶人的感知特性,基于心理场这一概念,借鉴物理场的有关知识,建立起了基于心理场的驾驶行为模型框架,并改进了经典的GM(General Motor)跟驰模型。WANG、MULLAKKAL-BABU等[3-4]利用心理场理论,考虑形成风险,建立起安全场模型。陈康等[5]通过引入时间距离这一概念,依据心理场理论,借鉴物理场概念,建立了驾驶人心理等势线,最终建立起高速公路弯道路段的心理模型框架,基于此改进车头间距以提高车辆跟驰模型的抗干扰能力。刘红[6]对道路交通中的冲突进行了研究,结合城市道路交通冲突理论和物理场的相关理论,研究了基于心理场的驾驶人驾驶行为。于乐美[7]结合物理学中的场和心理场理论,建立了交通冲突环境下的驾驶人心理场,并考虑了人-车-路等多方面的影响,为交通冲突环境下交通安全提供了一种新的研究思路。陆百川等[8]通过将交通心理学和交通行为学综合考虑,对行人的过街行为进行了分析,建立了过街行人的心理场强模型。刁素素[9]将心理场理论应用到对行人过街行为的分析中,根据行人过街时对周围环境的感知形成的心理压力,构建了过街行人心理场,建立了对应模型并进行了验证。赵巧等[10]从驾驶人对于周围环境的感知规律出发,提出基于心理场理论的车辆跟驰模型并进行了仿真验证。李爽[11]基于心理场理论,考虑到前车的差异性,提出一种考虑行车安全性和舒适性的车间时距控制新算法,提高了ACC(Adaptive Cruise Control,自适应巡航控制)车辆的安全性、舒适性。既有的研究成果,已证明心理场可以有效地应用于道路交通环境中的车辆行为的建模,但均未较为全面、深入地考虑不同交通参与者之间的心理性格差异,是导致其决策行为差异性的一大因素。
因此,本研究在既有的车辆跟驰理论基础上,将不同驾驶员驾驶风格的差异性融入到心理场模型框架中,构建能够充分考虑驾驶人驾驶风格和行车环境影响的车辆跟驰行为模型。
1 驾驶风格分类与识别
驾驶风格是指驾驶人在长期行车过程行为中展现出的性格、习惯和意图趋势等特性,与驾驶人的心理活动密切相关。在车辆跟驰场景产生的心理场中,驾驶人作为场源,除了受到外界环境的影响,也受到自身驾驶风格的作用。研究从更为客观、系统的角度切入,对车辆跟驰行为中驾驶人产生的速度、加速度等动力学表征进行研究和分析,据此进行了驾驶风格的分类与识别。
1.1 指标选取
依据下一代仿真(Next Generation Simulation)项目中的I-80公开数据集,研究随机抽取了500组车辆跟驰轨迹数据进行分析。驾驶风格是驾驶人长期形成的一种动态属性,可表现在其驾驶的车辆外在表现出的动力学特征上,如车速、加速度、跟车间距等,研究选取指标为:速度平均值,m/s;速度标准差,m/s;速度中位数,m/s;加速度平均值,m/s2;加速度标准差,m/s2。
1.2 因子分析
多维数据会影响聚类算法的准确性,故研究运用SPSS软件中的因子分析对指标进行降维处理。为了保证指标之间的联系性,对指标进行了KMO(Kaiser-Meyer-Olkin)检验和巴特利特(Bartlett)球形检验。KMO取样适切性量数为0.649(>0.6),巴特利特球形检验显著性为0,证明各变量之间存在较强的关联性,故可以进行因子分析,最终得到旋转后的成分矩阵如表1所示。
1.3 驾驶风格聚类
依据因子分析结果,应用k-means算法对所有车辆进行聚类分析,具体流程如图1所示。
k-means聚类步骤通过SPSS软件进行,将驾驶风格最终分为了3类,如图2所示。

图1 k-means算法流程

1.4 驾驶风格分类验证
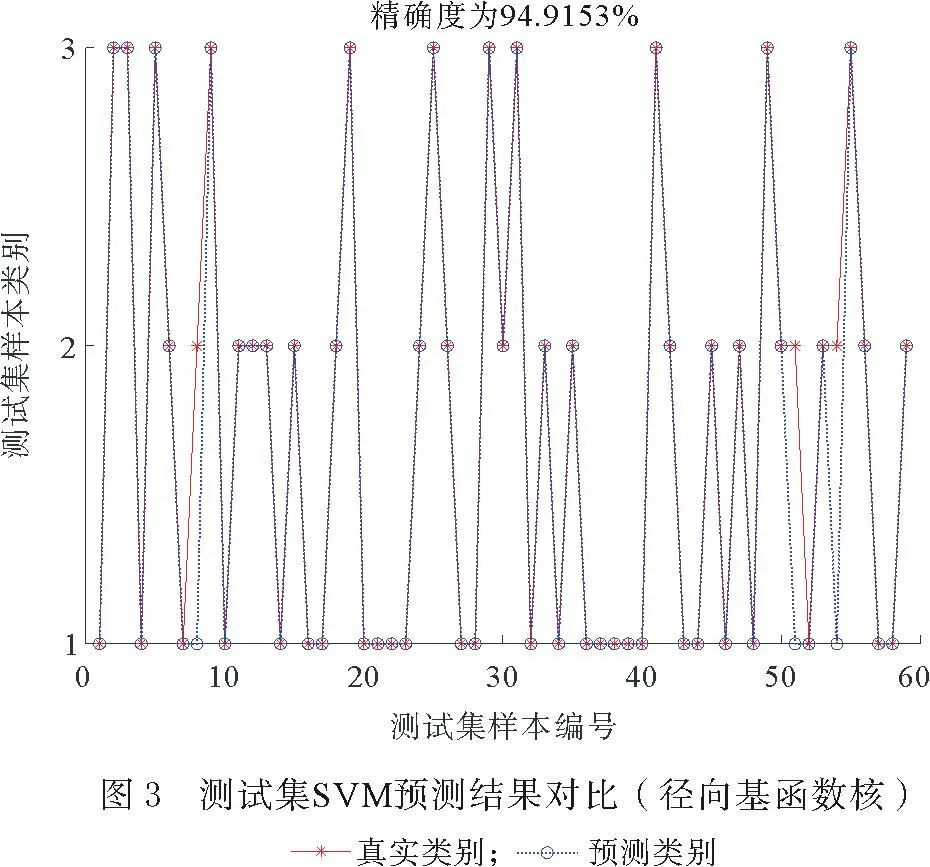
通过驾驶风格聚类算法,已经为所选的数据集中的车辆贴上了不同的类型标签。但聚类模型在数据量过大及过小时易产生误差,故需要再使用支持向量机(Support Vecor Machine, SVM)分类算法进行验证。
根据主成分分析得到的驾驶风格主成分判定特征和k-means聚类算法为每组数据标记的类型,进行驾驶风格识别模型训练。将训练样本分为标记样本和未标记样本,利用labvim模型进行SVM算法程序运行验证,最终得到SVM预测精度如图3所示。
1.5 驾驶风格识别与分析
对能够反映驾驶风格类型的量化特征取均值,得到表2。

表2 不同驾驶风格的量化特征均值
不难看出,驾驶风格为1类的驾驶人速度平均值、中位数和加速度的平均值、标准差都更高,因此可以认为,1类驾驶人更为激进,会保持更高的速度、加速度,运动状态变化更剧烈,故定义其为激进型驾驶人;与之相反,3类驾驶人速度、加速度的大部分指标相比其他类型都更低,运动状态变化较和缓,故将其定义为保守型驾驶人;指标适中的2类驾驶人定义为普通型驾驶人。
2 心理场效应分析
2.1 心理场效应
心理场理论运用心理学的有关概念以及个人对外界的主观感受对心理场进行研究,借由物理场的研究方法,可以将这种用逻辑和概念表达的理论量化为数学化的模型。物理场中的场源会对场中的其他物体产生力的相互作用,心理场则是以人作为场源,因此人会因受到自身和外界环境的影响而改变自身的状态,但不会对心理场环境中的其他物体产生作用。心理场环境对于处于其中的人产生影响的现象,称为心理场效应。车辆运行过程中,驾驶人与周围环境会形成驾驶心理场,其基本数学关系可以表示为
B=f(PM)
(1)
式中:B为驾驶人所受到的心理压力;P为驾驶人个人内在心理特性;M为行车环境影响。
由式(1)可以看出,驾驶人行为由三方面因素共同决定,即行车环境M、个人内在心理特性P以及行为的产生函数对应法则f,因此在同一个行为产生法则(如前方出现险情而紧急制动等)下,驾驶人最终产生的行为不仅受到环境因素的影响,也随不同驾驶人心理特性的不同而表现出差异。
2.2 心理场效应影响因素分析
2.2.1 驾驶人特性影响分析
驾驶人是驾驶心理场的场源,会因外界环境影响改变自身状态,但驾驶人的年龄、情绪、风险及危险感知、驾驶目的等,也在一定程度上影响着驾驶人的跟驰决策。通过对大量驾驶人历史行车状态信息(包括跟车间距、速度、加速度等)的深入分析,可以得到各驾驶人驾驶风格的差异性具体表现。根据既有的驾驶风格研究中提到的驾驶行为的产生过程机制,引入感知系数和反应系数2个指标来表征驾驶人特性。感知系数反映了驾驶人对于前方车辆的速度感知敏感性,感知系数越大表示驾驶人对于前方车辆速度更加敏感,反应更迅速;反应系数则反映了驾驶人感知到前方车辆变化并做出制动反应的效率,驾驶人对获取信息做出反应越迅速,反应系数越大。
2.2.2 客体车辆的影响分析
将行驶中的车辆n作为研究对象,心理场影响范围如图4所示。在车辆均没有换道意图的驾驶场景下,主体车辆发生跟驰行为时,主体车辆的心理压力基本只来自于本车道正前方车辆。
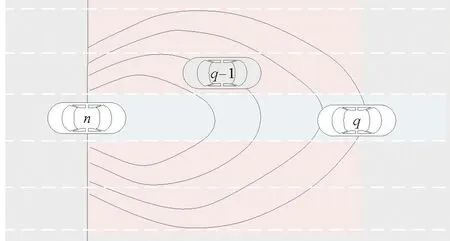
图4 心理场影响范围
与主体车辆相似,前方车辆的驾驶风格不同时,对后车产生的影响也会存在着差异。对于跟驰车辆来说,无法直接得知前方车辆的驾驶风格。在此情况下,可通过分析前方车辆的动力学特征,使用数学形式表示不同车辆的驾驶风格,因此引入前方车辆驾驶风格修正系数:
(2)
式中:β为驾驶风格修正系数;b为待标定的加速度敏感参数;aL为前车的加速度。
前车加速度越大,可认为前车的驾驶风格一般更加激进,故设置的β会随着前车加速度绝对值的增大而减小。
2.2.3 道路条件的影响分析
道路条件包括路面状况、几何线形与标志、标线等,对于道路上的车辆主要存在着安全范围影响。驾驶人行车时会因道路条件的不同而采取不同的措施,形成的驾驶心理场的范围也会有区别。
单车道发生跟驰行为时,对外界交通条件的要求更低,在不涉及换道的跟驰行为研究中,车辆均行驶于笔直的单车道道路中央的理想环境下,故在建模过程中不再过多考虑道路条件的影响。
3 考虑驾驶风格的心理场跟驰模型
3.1 驾驶风格心理场模型基本框架
基于心理场效应,考虑到驾驶人特性和前方客体车辆的影响,建立了考虑驾驶风格的心理场跟驰模型,简称驾驶风格心理场(Psychological Field of Driving Style,PF-DS)模型,基本框架为
E(P,M)=P+M
(3)
式中:E为场强。
3.1.1 驾驶人特性影响项
驾驶人心理压力(即心理场场强),与跟驰车辆的速度、前方车辆的接近程度密切相关。在车辆行驶方向上,距前方车辆更近的位置、更短的距离与更高的速度均会对驾驶人产生相对更大的心理压力,即具有更高的心理场场强;而在远离前方车辆的位置,充裕的应对时间会使驾驶人对前方车辆的关注程度降低、心理压力减小,在心理场中则对应着具有相对更小的心理场场强。由此,在车辆行驶方向的一维直线上,可仿照电磁场场强的计算方式确定驾驶心理场中心理压力的函数表达形式,称之为心理场基础场强函数:
(4)
式中:En为行驶车辆n所形成的心理场的基础场强值;vn为行驶车辆n的速度;L为沿车辆行驶方向上与车辆出发点之间的距离,在实际应用中定义为行驶车辆与前车的距离。
依据心理场场强与驾驶人反应系数,确定驾驶人特性影响项:
(5)
式中:η为驾驶人反应系数。
3.1.2 客体车辆影响项
驾驶风格是驾驶人长期形成的一种动态特性,而运行状态能体现出车辆当下的一种动态特性。在本研究的跟驰场景中,客体车辆为前方车辆,前方车辆与主体车辆的相对距离越小,前方车辆的速度越大时,主体车辆会有更大的心理压力,即此时受到的影响更大,反之则更小。由此可知,前方车辆与主体车辆的相对速度和相对位置是表征前方车辆对主体车辆影响的重要特征,故用相对速度和相对距离的比来表示这一影响:
(6)
式中:M0为前方车辆影响函数;vi,xi分别为当前车辆的速度以及坐标;vi-1,xi-1分别为前方车辆的速度以及坐标;Δv为前方车辆与后车的速度差;Δx为前后车的车头间距。
依据心理场分析中得到的驾驶风格修正系数和驾驶人感知系数,最终得到客体车辆影响项:
(7)
式中:γ为驾驶人感知系数。
3.2 基于心理场效应的FVD跟驰模型改进
3.2.1 FVD模型
全速度差(Full Speed Difference,FVD)模型[12]通过考虑正、负速度差来修正前方车辆与后车之间的距离,其表达式为
an(t)=α[V(Δxn(t))-vn(t)]+δΔvn(t)
(8)
式中:V为优化速度函数;Δxn(t)为车辆n与前车n-1之间的车头距离;vn(t)为车辆n当前的速度;Δvn(t)为车辆n与车辆n-1之间的速度差;α,δ分别为敏感系数,使用文献[13]中标定的参数α=0.273 s-1,δ=10 m/s。
3.2.2 基于心理场效应改进的FVD模型
在FVD模型的第1项中,2个主要影响因素分别是车辆n的当前速度和两车之间的车头距离Δxn(t),这与驾驶心理场中个人影响作用相对应,故将第1项作为驾驶人个人行为影响项。在FVD模型中第2项反映的是前方车辆与后车的相对速度关系,可以认为是前方车辆对于后车的影响作用,即此项为前方车辆影响作用项。另外,考虑到驾驶人从接收到刺激信息到驱使车辆产生响应动作之间存在一定的反应延迟,因此对优化速度函数进行改进,同时引入了速度差延迟系数。
最终得到驾驶风格心理场模型的动力学方程:
(9)
式中:Δxn(t+κT)为修正后车辆n与前车n-1之间的车头距离,κ为速度差优化系数;Δvn(t+μT)为修正后车辆n与车辆n-1之间的速度差,μ为速度差延迟系数;T为时间步长。
为简化方程,进行泰勒展开得到:
(10)
优化速度函数V(Δx)是FVD模型中重要的组成部分,本研究选用文献[13]中的优化速度函数:
(11)

3.3 模型参数标定
根据建立完成的模型表达式(9)中已标定的参数为敏感系数α,δ,另需进行标定的参数有驾驶人反应系数η、驾驶人感知系数γ、速度差优化系数κ、速度差延迟系数μ与加速度敏感参数b。
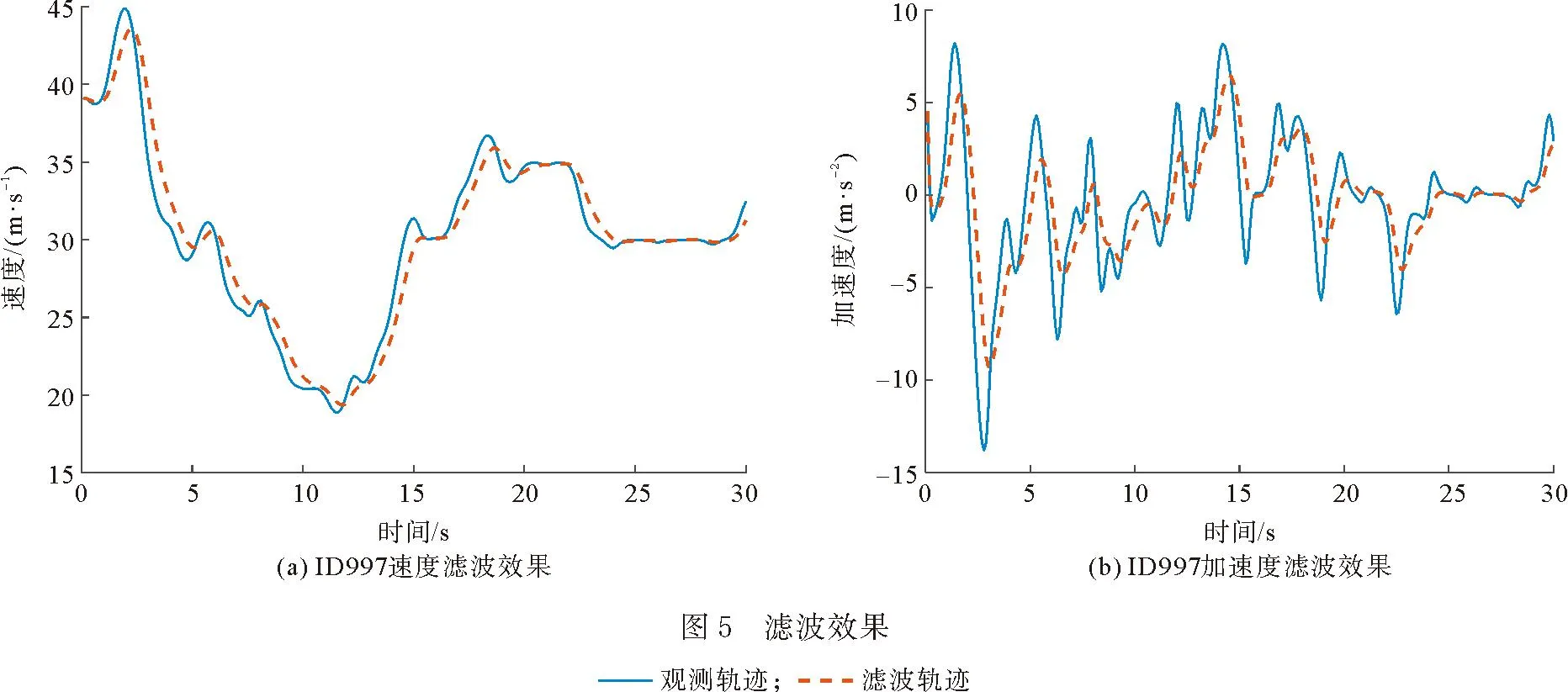
将所建模型基于驾驶风格辨识步骤中选取的500组NGSIM项目中的I-80数据进行标定。由于NGSIM数据集中的原始轨迹数据是通过图像识别技术进行分析处理之后得到,故存在随即噪声,需要对数据清洗和滤波之后才能进行进一步分析。驾驶风格聚类分析时,已经对数据进行了简单地清洗,在本节中,选择卡尔曼滤波器(Kalman Filter)对数据进行滤波处理(图5)。
提取数据集中跟驰状态时间不低于25 s的30组驾驶风格不同的车辆对,利用模拟退火算法进行参数标定(图6)。
模型标定利用MATLAB软件进行,为确定算法最优参数,首先随机抽取了数据集中的1组数据,利用其确定模拟退火算法相关参数,进行了多次控制变量实验,最终选取4次结果(图7)。
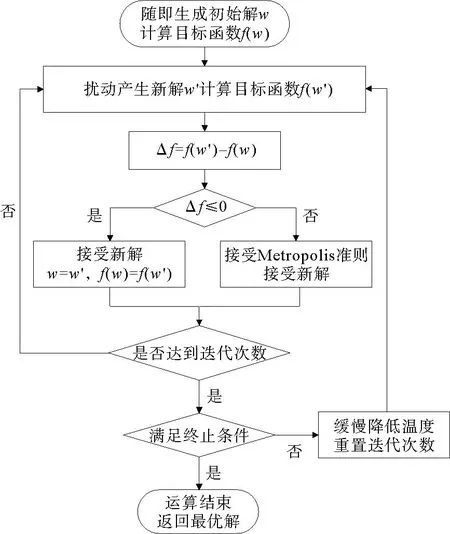
图6 模拟退火算法步骤
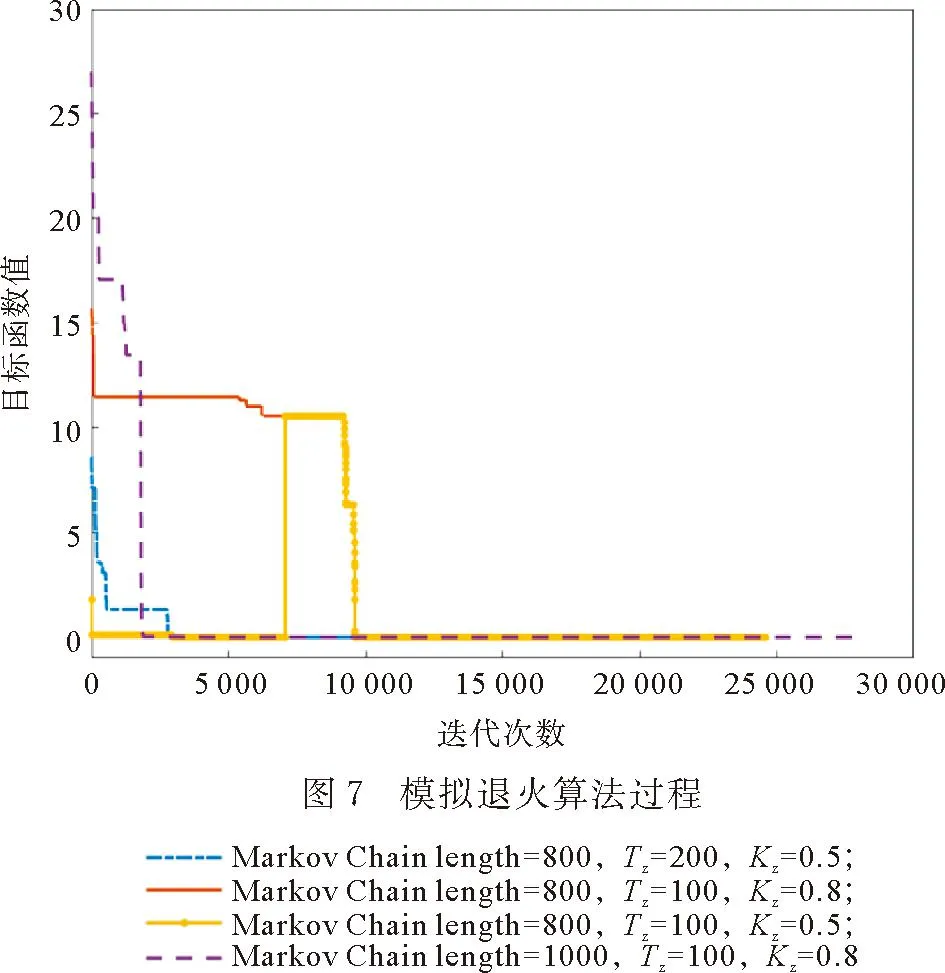
由图7可知,马科夫链长度(Markov Chain length)的增加、初始温度(Tz)的降低以及衰减参数(Kz)的降低,模拟退火算法的初始目标函数值都会增大。综合对比图7可知,在马科夫链长度设置为800 m,衰减参数设置为0.8,初始温度设置为100 ℃,随着温度降低,波动幅度减小,最终得到最优值。其中,接受差解的容忍度设置为10-12,用以表示可接受的误差值大小。为了避免因算法的随机性造成的误差,对于每次标定产生的结果进行了多次优化,最终选出误差值最小的1组,得到标定结果如表3所示。

表3 模型标定结果
从驾驶人反应系数来看,保守型驾驶人的感知程度小于其他类型的驾驶人,且激进程度越高,反应系数越大;从驾驶人感知系数来看,普通型驾驶最高的,保守型最低;而速度差优化系数、速度差延迟系数和加速度敏感系数都随着激进程度的降低而增加。激进型驾驶人的反应系数和感知系数较高,但对前方车辆加速度的优化系数、敏感系数和延迟系数较低;保守型驾驶人则相反;普通型驾驶人除了感知系数较高外,其他参数值都处于中间值。综合来看,标定结果与之前对各类型聚类结果的分析相似,故引入的参数比较契合。
4 模型评价
为了对所建立的驾驶风格心理场模型进行客观评价,研究设计并进行仿真跟车实验,且选取FVD模型与相互作用势模型[14]作为对比参照。相互作用势模型将车道中的车辆类比为管道中运动的分子,利用分子动力学理论解析车辆跟驰行为,与本研究中用人工势场方法进行跟驰行为建模有一定的相似性。
从NGSIM I-80数据集随机抽取10组跟驰车辆的运动数据,使用k-means聚类算法进行分类及判别。将车辆驾驶人按驾驶风格分为3组,再从3组数据中各自随机抽取1组,分别与研究建立的3种驾驶风格的模型仿真车辆进行对比分析。
根据仿真实验结果分别绘制3组模型车辆与真实后车在跟驰过程中的加速度和速度曲线图像,观察不同模型车辆与实车的运动情况差异。为更为直观地对比不同跟驰模型对实车跟驰行为的拟合程度,引入平均绝对误差(Mean Absolute Error,MAE)和均方根误差(Root Mean Square Error,RMSE),数学表达形式如下:
(12)
(13)

FMAE反映的是模型与实测数据的偏差程度,数值越小,表示与实测数据的偏差越小;FRMSE反映的则是误差值变化程度,表征了模型的稳定性,数值越小,说明模型越稳定。
4.1 激进型后车
由图8可以发现,与FVD模型和相互作用势模型不同,驾驶风格心理场模型(激进型)存在着合理的反应延迟,与后车真实速度的表现更为吻合。这是因为驾驶风格心理场模型不仅充分考虑到驾驶人特性的影响,还引入反应延迟系数模拟了后车反应时间带来的影响。

由表4可知,相较于FVD模型,驾驶风格心理场模型(激进型)输出速度和加速度的FMAE分别下降了37.6%和29.6%,FRMSE分别下降了36.8%和27.8%,故驾驶风格心理场模型能够更加准确地模拟实际激进型车辆的跟驰行为。

表4 激进型后车拟合度评价
4.2 保守型后车
由图9可知,FVD模型和相互作用势模型在加速度和速度曲线图像中都比真实后车震荡幅度更大,而驾驶风格心理场模型震荡程度更接近真实后车轨迹,与实际情况中的保守型车辆的跟驰行为更加吻合。
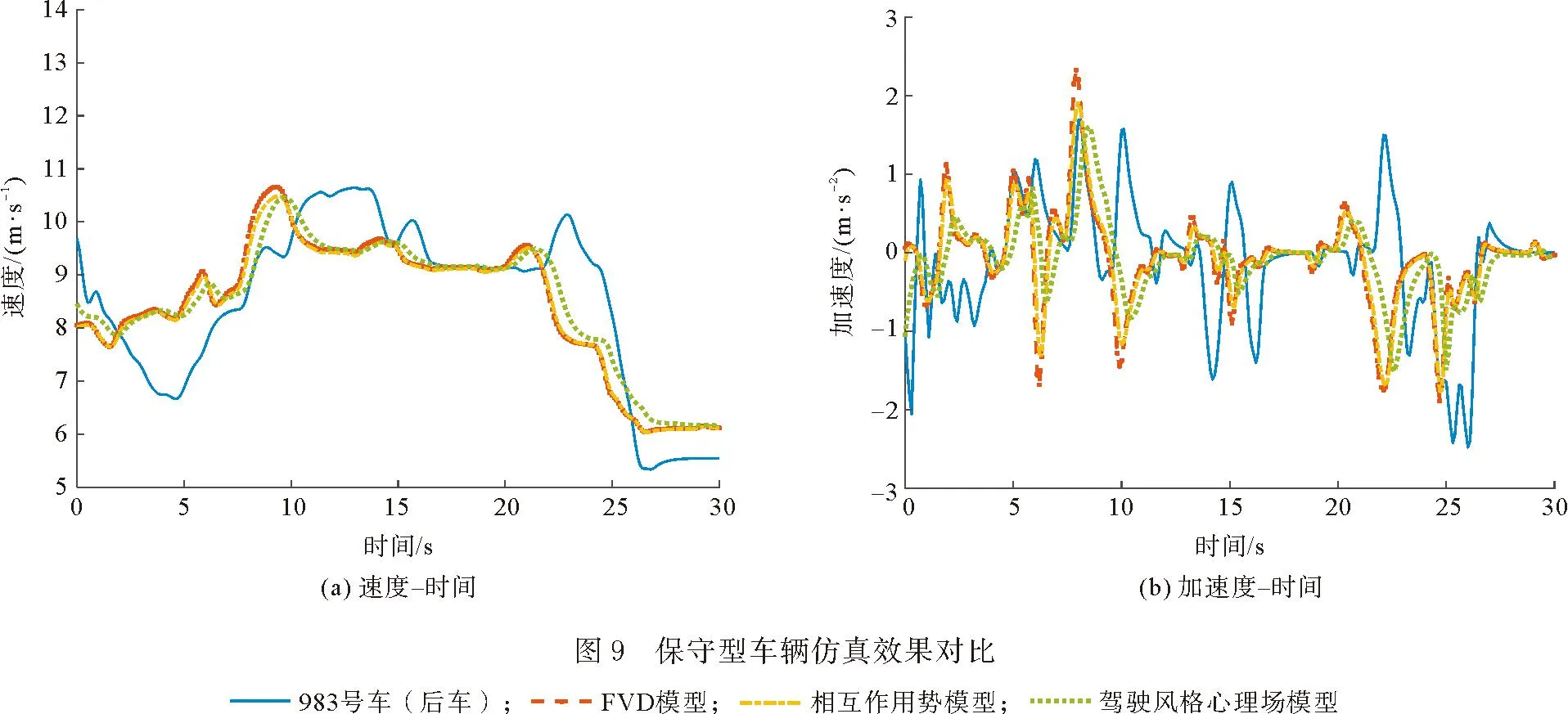
由表5可知,相较于FVD模型,驾驶风格心理场模型(保守型)输出速度和加速度的FMAE分别下降了18%和21%,FRMSE分别下降了17.5%和33.7%,故驾驶风格心理场模型能够更加准确地模拟实际保守型车辆的跟驰行为。

表5 保守型后车拟合度评价
4.3 普通型后车
由图10可知,后车为普通型时,驾驶风格心理场模型相比于FVD模型和相互作用势,延迟程度更接近于后车真实数据。
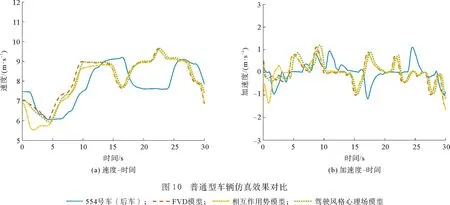
由表6可知,相较于FVD模型,驾驶风格心理场模型(保守型)输出速度和加速度的FMAE分别下降了9%和0.6%,FRMSE分别下降了7%和0.7%,故驾驶风格心理场模型能够更加准确地模拟实际普通型车辆的跟驰行为。

表6 普通型后车拟合度评价
5 结束语
本研究基于心理场基本理论,建立驾驶风格心理场模型基本框架;基于此框架,考虑到驾驶风格导致的跟驰行为的差异性,通过对FVD模型的改进,建立了驾驶风格心理场模型。
驾驶风格心理场模型与FVD模型和相互作用势模型的对比仿真实验结果显示,对于不同驾驶风格的驾驶人,该模型的精度和稳定性都更高,说明该模型相比既有模型能更有区分度且真实地反映跟驰车辆的运行状况,为心理场方法研究车辆交互行为提供思路,对微观交通流特性研究有重大意义。
在后续研究中,将进一步考虑多车道道路中包含有换道行为的行车场景,对侧前车辆对驾驶人产生的心理压力展开更深入地分析,研究充分考虑换道车辆的心理场车辆行为建模方法;随着道路交通智能化、网联化的发展趋势,还将探寻基于驾驶风格的心理场理论在智能网联环境下的应用。
猜你喜欢
当代水产(2022年6期)2022-06-29
小猕猴智力画刊(2022年4期)2022-05-25
中学生百科·大语文(2021年4期)2021-05-12
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
新传奇(2018年16期)2018-05-14
人民交通(2016年5期)2017-01-05
发明与创新(2016年5期)2016-08-21
文苑·经典美文(2009年7期)2009-08-25