
基于黄灯困境区的相位安全切换时机研究
2024-01-02 01:13焦兴旺张福生黄柄胜
湖南交通科技 2023年4期
焦兴旺, 张福生, 黄柄胜, 赵 寅
(北方工业大学 城市道路交通智能控制技术北京市重点实验室,北京 100144)
0 前言
交叉口是城市道路的关键节点,也是交通事故的频发地。据统计,黄灯时间内发生的交通事故约占整个信号交叉口交通事故的50%以上[1]。研究表明,黄灯困境区的存在是导致信号交叉口发生追尾、侧向碰撞等事故的重要原因之一。黄灯困境区[2]是指在黄灯启亮时进口道前车辆既不能安全通过交叉口,又不能在停止线前安全停车的区域,俗称“两难区”,后文简称“困境区”。因此,剖析困境区的内在原理,规避困境区风险,对于减少交叉口交通事故,提高交叉口安全性具有重要意义。
为避免车辆陷入困境区,学者们从各个角度提出规避措施:①优化黄灯时长。合理的黄灯时长是实现“零困境区”的前提,过短的黄灯时长会导致路口存在困境区,过长的黄灯时长会导致闯红灯率和事故率增加。张亚平等[3]表示由于驾驶员特性发生变化,直行相位黄灯时长设为5 s,左转相位设为4 s才可以消除困境区。②设置不同的绿灯信号过渡机制。一是改变灯序,设置绿闪信号灯。沈家军等[4]表示通过设计合理的绿闪时长可消除困境区,但李克平等[5]表示绿闪发挥的其实是黄灯的作用,设置绿闪信号灯会增加车辆闯红灯率,不利于交叉口安全。二是设置倒计时信号灯。赵靖等[6]表示绿灯信号倒计时可显著缩短甚至消除困境区,同时降低车辆闯红灯的比例。三是设置警示系统。通过前置警示标志或信号,使进口道上车辆提前做好停车准备,避免进入困境区,常用于视距受阻、转弯的交叉口。前置警示闪烁灯 (Advanced Warning Flasher,AWF)是一种常见的警示系统[7],Burnett等[8]表示AWF虽然能够减少事故率,但增加了追尾风险和闯红灯率。③动态信号控制策略。一是动态黄灯策略。袁黎等[9]建立一种动态黄灯时间模型,刘润乔等[10]提出基于模糊控制的动态困境区黄灯时间控制策略。但动态黄灯控制策略在保护部分车辆同时,也会导致第二类困境区范围扩大、驾驶员的驾驶负荷增大。二是动态绿灯策略。Zegeer等[11]提出了绿灯延长系统(Green Extension Systems,GES),德克萨斯交通研究所开发了检测-控制系统(D-CS)[12],实践证明该方法可有效减少交叉口的交通事故率[13]。但由于固定检测器位置的限制,当道路车辆实际运行状态与设计过程不同时,车辆安全无法得到保证。随着先进检测技术、车路协同技术的发展,可采集的车辆数据不再局限于固定检测器采集的断面数据,车辆的实时轨迹数据也可以获取到[14],这为进行实时决策提供了条件,如张存保等[15]、刘诗福等[16]纷纷提出在车路协同控制模式下的信号控制交叉口困境区改善措施。
综合相关文献,当实际车辆的运行状态和道路环境发生变化时,“零困境区”路口的设计条件不能得到满足,路口在某些条件下可能存在困境区。为规避困境区风险,动态绿灯策略通过合理延长绿灯时长、改变黄灯启亮时间,可降低车辆在黄灯启亮时陷入困境区的概率。由于过去采用固定检测器,保护范围受到检测器位置限制,不能对超过检测器位置设计速度的车辆进行保护,也不能在绿灯时间达到最大绿灯时间(Maximum Green)时对困境区内的车辆进行保护[17]。而随着先进检测技术的发展,先进的检测器可获取车辆实时的轨迹数据,这为完善动态绿灯信号控制策略提供了契机。鉴于此,笔者归纳总结当前关于困境区的研究成果,指出在相位切换时,应先考虑进口道范围内所有车辆的安全需求,确保安全后再进行切换。
1 黄灯困境区的数学表述
1.1 黄灯困境区模型
1960年Gazis等首次发现信号控制交叉口进口道存在困境区并用经典GHM模型表示该区域范围。2008年,Wei等[18]从驾驶员认知行为的角度对该模型进行修改,修改后模型如式(1)所示:
(1)
式中:Xs指以某一速度行驶的车辆在看到黄灯启亮之后,能够安全停车所需的最小安全距离,也称之为困境区的上边界,m;Xc指以某一速度行驶的车辆在看到黄灯启亮之后,能够在黄灯持续时间内行驶的最大黄灯期间通行距离,也称之为困境区的下边界,m;v指黄灯启亮时抵近交叉口车辆的速度,m/s;δ指驾驶员的认知反应时间,s;d指车辆的减速度,m/s2;τ指黄灯时长,s;a指车辆的加速度,m/s2。
图1为黄灯困境区示意。当Xs

图1 黄灯困境区示意
假设在黄灯启亮时,车辆以路口限速值抵近交叉口,车辆能够安全舒适停车,车辆到达路口停止线的距离x满足式(2)条件。
(2)
式中:vlim指路口限速值,m/s。
反之,车辆能够安全顺利通过停止线,如式(3)所示:
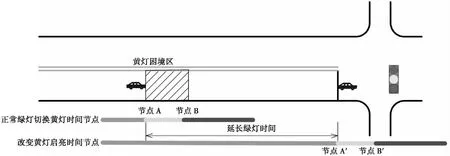
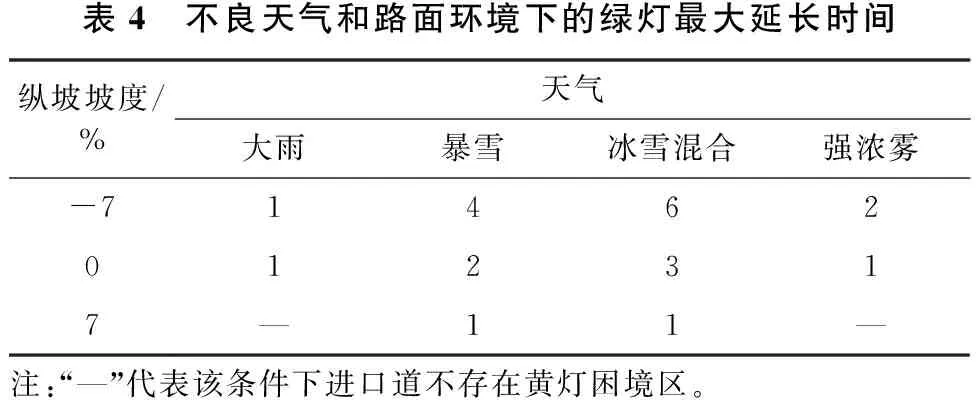
x (3) 当黄灯启亮时,一旦车辆所在位置无法同时满足式(2)和式(3)条件,此时车辆只能选择紧急刹车、超速通过路口或者闯红灯等危险驾驶行为,将该区域称为困境区,如式(4)所示: (4) 反之,车辆所在位置可同时满足式(2)和式(3)条件,此时车辆可自由选择停车或者通过停止线,将该区域称为选择区,如式(5)所: (5) 由式(4)可知,困境区边界受到抵近车辆速度、认知反应时间、减速度和黄灯时长等4个参数的制约。 1.2.1抵近车辆速度 在交叉口设计过程中,为消除困境区带来的风险,通常采用设计速度、85%位车速或者平均速度进行计算[19]。 1.2.2认知反应时间(PRT) 认知反应时间是指驾驶员认知黄灯信号并针对黄灯信号进行反应,做出停车制动或通过交叉口决策所需的时间。它集中体现驾驶员本身接收信息、处理信息的能力。不同的驾驶群体能力不一,在考虑绝大多数驾驶员的能力,通常取1 s的建议值[20]。 1.2.3减速度 减速度指黄灯启亮时,驾驶员决定减速后采取的减速度,可分为最大减速度和平均减速度。最大减速度是指车辆能够采取的最大减速度,即紧急制动减速度。平均减速度是指绝大多数车辆能够安全舒适停车所采取的减速度,即普通制动减速度,在设计过程中普通制动减速度通常采取3.05 m/s2的建议值[20]。 1.2.4黄灯时长 黄灯时长指路口黄色过渡信号的持续时间,在设置时应遵循3个原则:①黄灯时长最少应满足“零困境区”要求;②路口黄灯时长一旦确定,为赢得驾驶员尊重,保障法律权威,不得随意改动;③黄灯时长的起始时刻可随绿灯时长终止时刻改变而改变,但黄灯时长不变,这也是动态绿灯信号控制策略的基础。 由式(4)可知,为消除困境区的风险,黄灯时长至少应满足[3]: (6) 式中:d0指车辆普通制动减速度,m/s2,建议值一般取3.05 m/s2。 对式(6)化简得: (7) 此外,道路坡度会对车辆实际制动减速度产生影响,考虑坡度因素之后黄灯时长为[21]: (8) 式中:G指路口纵坡坡度,上坡为正,下坡为负,%;g为重力加速度,取值为9.8 m/s2。 考虑到路口信号实际运行中一般将黄灯时长设为整数,且过长的黄灯时长不仅会增加第二类黄灯困境区的范围,还会降低交叉口通行效率,增加闯红灯率,因此取黄灯时长的计算公式为[22]: (9) 式中:[*]表示取不大于*的最小整数。 在我国减速度一般取值为3.0~3.5 m/s2[1],并且考虑到公路纵坡一般≤7%[20],则依据式(8)和式(9),在限速值为vlim=60 km/h的路口,δ=1 s,g=9.8 m/s2时,不同坡度和设计减速度条件下的路口所需黄灯时长如表1所示。 表1 限速值为60 km/h的路口在不同坡度和减速度条件下的黄灯时长d0/(m·s-2)类别以下路口坡度(%)的黄灯时长/s-7-6-5-4-3-2-1012345673.0取整前4.604.454.324.204.083.973.873.783.693.613.533.463.393.323.26 取整后5555544444444443.5取整前3.963.863.773.683.603.523.453.383.323.253.203.143.093.042.99取整后444444444444443 假设某一路口采取建议值进行设置,即路口限速值为60 km/h,车辆减速度为3.0 m/s2,驾驶员认知反应时间为1 s,黄灯时长设为4 s,加速度为0,路口坡度为0。路口建设完成之后,依据式(1)困境区上边界为63 m,下边界为66.7 m,此时道路上不存在困境区。 然而,由于驾驶员能力、车辆性能、路口环境等因素,实际抵近路口车辆可能不以设计参数行驶,这导致原来不存在困境区的路口对某些特定场景下的车辆而言是存在困境区的,例如:①以超过设计速度行驶的车辆;②由于天气、视距、时区等因素导致车辆减速度较小的车辆等。 由2.1可知,虽然在路口设计过程中通过设置合适的控制参数从理论上消除了困境区,但在实际运行过程中仍可能出现困境区,存在黄灯启亮时车辆陷入困境区的可能性。为消除这种可能性,传统动态绿灯控制策略从延长本相位绿灯时间、动态改变黄灯启亮时刻的角度出发,保证车辆的安全;在黄灯时长固定的条件下,通过改变绿灯结束时刻,避免黄灯启亮时刻困境区存在车辆的情况发生。检测器检测困境区内存在车辆后,通过延长绿灯时间使节点A延长至节点A′,且|AB|=|A′B′|,从而达到黄灯启亮时困境区内不存在车辆后再进行相位切换的目的(见图2)。 图2 通过改变黄灯启亮时刻保护困境区内车辆示意 以感应控制为例[17]:感应控制通过设置最大绿灯时间、最小绿灯时间、通过时间和间隙时间等4个参数,实现了Gap-Out和Max-Out这2种控制模式(见图3)。但是这2种控制模式由于固定检测器位置的限制,在保证相位黄灯启亮这一时刻车辆的安全性方面尚有缺陷:①间隙时间指采用的饱和流率通行对应的车头时距。采用固定检测器时,假设设计检测器位置选用的速度为Vp,由于速度越大困境区边界距离停止线越远[20],所以当进口道存在速度以>Vp行驶的车辆时,可能在黄灯困境区内有车的情况下执行Gap-Out模式,此时该车辆安全无法保证;②在Max-Out(由于最大绿灯时间限制造成相位绿灯终止的现象)被执行时,同样在相位切换过程没有考虑最大绿灯时刻困境区内有车时该车的安全性。 图3 黄灯启亮时刻可能陷入黄灯困境区的车辆 从交通信号控制的角度进行分析,同一相位内不同信号灯灯色的转换代表进口道内车辆的驾驶任务发生变化。将信号转成过程分为6个阶段,各个阶段车辆的驾驶任务与车辆位于进口道位置的关系如表2所示。 表2 信号灯灯色转换过程中驾驶任务与车辆位于进口道不同位置的关系信号灯灯色转换过程驾驶任务车辆位于进口道的区域驾驶员能否安全完成驾驶任务相位绿灯(时间段)通过交叉口通过区√停车区×通过停止线困境区×通过区√相位绿灯切换为黄灯(时刻)停车区√安全停车困境区×通过区×停车区×通过停止线困境区×通过区√相位黄灯(时间段)停车区√安全停车困境区×通过区×相位黄灯切换为红灯(时刻)安全停车停车区√相位红灯(时间段)安全停车停车区√相位红灯切换为绿灯(时刻)通过交叉口通过区√注:通过区指进口道前车辆能够安全通过停止线的区域;停车区指进口道前能够安全停车的区域;困境区指进口道前既不能安全停车又不能安全通过停止线的区域。 在相位绿灯、相位黄灯切换为红灯时刻、相位红灯、相位红灯切换为绿灯时刻等4个阶段,整个进口道只有一个驾驶任务,驾驶员不会产生决策差异。 在相位绿灯转换为黄灯时刻和相位黄灯2个阶段内,进口道范围内共存在两个驾驶任务,并且位于进口道不同区域的车辆能够完成的驾驶任务不同。尤其是位于困境区内的驾驶员无法安全完成任意一个驾驶任务。 从交通安全角度而言,只有在保证车辆能够完成相应驾驶任务的前提下才可以进行相位切换。虽然相位黄灯阶段车辆也可能陷入黄灯困境区,但是考虑到相位绿灯转换黄灯时刻发生在相位黄灯之前,并且在转换时刻大部分车辆已经根据自身位置等信息做出决定,因此本文只研究相位绿灯切换黄灯阶段的时机对交叉口的安全性影响。 在以饱和交通流运行的交叉口中,车辆以较低的速度行驶,因车辆之间阻滞效应困境区并不会对车辆的安全造成影响。然而在车流量较低的路口,车辆以高速抵近交叉口容易受到困境区影响,并发生严重交通事故。因此,本文对特定交通条件下进行相位切换时机的研究,并做出以下假设:①交叉口为信号控制交叉口,并且黄灯信号时长固定,在信号转换过程中不改变;②交叉口安装有广域检测器,可检测所有抵近车辆的实时轨迹数据,包括运动特征和位置信息;③交叉口安装信号控制器,具有动态改变绿灯信号时长的能力;④交叉口的车流量较小,车流密度较低,抵近车辆以高速行驶。 随着先进检测技术、车路协同技术的发展,可采集的车辆数据不再局限于固定检测器采集的断面数据,还可以采集到实时车辆轨迹数据。在车辆实时轨迹数据可获取的前提下,可以根据车辆运动状态信息和位置信息判断车辆是否位于困境区内,并反馈到信号控制系统,避免在困境区有车时进行相位绿灯切换。这种将困境区内车辆安全性考虑为第一指标、通行效率等其它指标次之的相位切换策略,本文称之为相位最佳安全切换策略,如图4所示。 图4 考虑困境区内车辆安全需求的相位最佳安全切换策略 3.2.1判断困境区是否存在车辆 根据检测器检测到的车辆运动信息(速度、减速度)和位置信息(到达停止线距离),结合式(10)判断xi、xci和(xsi+Li)之间的关系。当xi>xsi+Li时,车辆能安全停车,不在困境区;当xi 图5 陷入困境区内的车辆 (10) 式中:xci指绿灯结束时刻车辆i在黄灯持续时间内的最大通过距离(以车尾为准),m;xi指绿灯结束时刻车辆i至停止线的距离(以车尾为准),m;xsi指绿灯结束时刻车辆i的最小安全停车距离(以车头为准),m;Li指绿灯结束时刻车辆i的车辆长度,m;vi指绿灯结束时刻车辆i的实际速度,m/s;di指绿灯结束时刻车辆i的预计采取的减速度,m/s2;i指绿灯结束时刻进口道上车辆的编号,从1开始编号;N指绿灯结束时刻进口道上车辆总数。 3.2.2确定相位最佳安全切换时机 在信号方案运行过程中,进口道的相位绿灯即将结束时,如果此时检测器检测到困境区内不存在车辆,绿灯可正常切换黄灯;如果此时检测器检测到困境区内存在车辆,为保证车辆安全,此时绿灯不能切换黄灯,需要延长绿灯时间,至少保证车辆通过困境区后再切换为黄灯。本文将考虑黄灯困境区内车辆安全性的相位切换时间称为相位最佳安全切换时机。 在绿灯结束时刻,首先依据式(11)判断困境区内是否有车辆: (11) 式中:n指绿灯结束时刻陷入困境区的车辆数量。Δxi指车辆i是否在困境区内,Δxi=0,车辆i不在困境区;Δxi=1,车辆i在困境区。 1)假设n=0,困境区内不存在车辆,该时刻便是相位最佳安全切换时机,正常切换黄灯即可。 2)假设n≠0,则风险车辆位于困境区内,此时并非相位最佳安全切换时机,需要考虑黄灯困境区内的车辆安全,延长一定绿灯时间,重新选择合适的切换时机。 假设n=1,即黄灯困境区内存在一辆车,此时该进口方向相位绿灯需要延长一定的绿灯时间,该时间应保证此车辆至少可以通过黄灯困境区下边界,如式(12)所示: (12) 式中:T指进口道以相位最佳安全切换时机进行切换需要的绿灯延长时间,s;tj指绿灯结束时刻陷入困境区的车辆j通过停止线预计需要的时间,s。 假设n>1,即在绿灯结束时刻不止一辆车位于困境区。同理该进口方向需要延长一定绿灯时间,并且应满足所有车辆通过黄灯困境区下边界,如式(13)所示: T=max(tm-τ),m=1,2,…,n (13) 式中:tm指绿灯结束时刻陷入困境区的车辆m预计通过停止线需要的时间,s。 依据本节假设条件,只有在高速、低流量、低密度的路口才可能出现原有困境区保护措施失效的情况,尽管这种情况发生的可能性概率较低,但是实际道路中应消除这种可能性,因为其一旦发生往往伴随着极其严重的交通事故。同时因为其出现的概率较低,故不考虑二次延长的情况。 考虑到在实际工程中,相位绿灯延长时间为整数,由此可以得到基于黄灯困境区车辆安全性的相位最佳安全切换模型,如式(14)所示: T={0,n=0 [tj-τ]+1,n=1 max[tm-τ]+1,m=1,2,…,n,n>1 (14) 对于路面纵坡坡度为-7%、0、7%的3个路口,其设计参数为减速度3.05 m/s2、速度限速值60 km/h、驾驶员认知反应时间1 s、车辆长4.6 m[24]。为规避困境区的风险,黄灯时长分别设为5、4、4 s。在正常(晴朗天气)条件下,3个路口均不存在黄灯困境区。但是在不良天气和路面环境下,车流运行特征发生显著变化[25],此时对于以限速值行驶的抵近车辆而言,道路可能存在困境区,如表3所示。如果绿灯结束时刻困境区内有车,为保证路口按照相位最佳安全时机切换,在大雨、暴雪、冰雪混合和强浓雾不良天气和路面条件下,绿灯最大延长时间(当车辆车头恰好位于困境区上边界时)如表4所示。 由表3~4可知,在不良天气和路面环境条件下,车辆实际减速度相比设计减速度较小:对于路口来说,天气烈度越大,路口纵坡坡度越小,路口出现困境区的概率越大,困境区长度越长;对某一速度的抵近车辆而言,天气烈度越大,路口纵坡坡度越小,车辆陷入困境区的概率越大,所需绿灯延长时间越大;上坡和平坡路口困境区内的车辆可能需要1~3 s的绿灯延长时间保证路口可以按照相位最佳安全切换时机进行切换。下坡路口则需要1~6 s的绿灯延长时间。 表3 不良天气条件下不同速度对应的实际黄灯困境区天气剧烈程度分级Da/(m·s-2)实际黄灯困境区范围纵坡坡度为-7%纵坡坡度为0纵坡坡度为7%Xs/mXc/mLDZ/mTDZ/sXs/mXc/mLDZ/mTDZ/sXs/mXc/mLDZ/mTDZ/s02.9677.7 66.7 --63.6 66.7 --54.8 66.7 --雨小雨2.7185.3 66.7 2.0 0.4 67.9 66.7 1.3 0.4 57.6 66.7 --中雨2.6587.4 66.7 4.1 0.5 69.1 66.7 2.4 0.4 58.3 66.7 --大雨2.689.2 66.7 5.9 0.6 70.1 66.7 3.4 0.5 58.9 66.7 --02.7683.6 66.7 0.3 0.3 67.0 66.7 0.3 0.3 57.0 66.7 --小雪2.882.4 66.7 --66.3 66.7 --56.5 66.7 --下雪中雪2.33101.1 66.7 17.8 1.3 76.3 66.7 9.6 0.9 62.7 66.7 --大雪2.11114.2 66.7 30.9 2.1 82.5 66.7 15.8 1.2 66.3 66.7 --暴雪1.89132.0 66.7 48.7 3.2 90.2 66.7 23.5 1.7 70.6 66.7 3.9 0.5 轻度2.5989.6 66.7 0.7 1.7 70.3 66.7 3.6 0.5 59.1 66.7 --松软雪中度2.33101.1 66.7 1.3 2.3 76.3 66.7 9.6 0.9 62.7 66.7 --重度1.97124.8 66.7 2.8 3.8 87.2 66.7 20.5 1.5 69.0 66.7 2.3 0.4 积雪融化雪1.92129.2 66.7 45.9 3.0 89.0 66.7 22.3 1.6 70.0 66.7 3.3 0.5 压实雪1.87134.0 66.7 50.6 3.3 90.9 66.7 24.3 1.7 71.0 66.7 4.3 0.5 路面结冰1.82139.1 66.7 55.8 3.6 93.0 66.7 26.3 1.9 72.1 66.7 5.4 0.6 冰雪混合1.63163.8 66.7 80.5 5.1 101.9 66.7 35.2 2.4 76.6 66.7 10.0 0.9 轻雾2.9677.7 66.7 --63.6 66.7 --54.8 66.7 --雾2.7185.3 66.7 2.0 0.4 67.9 66.7 1.3 0.4 57.6 66.7 --雾大雾2.6487.7 66.7 4.4 0.5 69.3 66.7 2.6 0.4 58.4 66.7 --浓雾2.593.2 66.7 9.9 0.9 72.2 66.7 5.6 0.6 60.3 66.7 --强浓雾2.26104.9 66.7 21.6 1.6 78.1 66.7 11.5 1.0 63.8 66.7 -- 注:①Da指不良天气条件下的车辆制动减速度;Xs指黄灯困境区的上边界;Xc指黄灯困境区的下边界;LDZ指黄灯困境区的长度,LDZ=Xs+L,L为车辆长度;TDZ指车辆车头恰好位于困境区上边界,直至车尾完全通过困境区下边界所需的时间,TDZ=LDZ/vlim。②假设除坡度、减速度参数外,其它设计参数取值相同,“-”表示该条件下路口不存在黄灯困境区。③小雨为降雨量0~0.254 mm/h,中雨为降雨量0.255~6.35 mm/h,大雨为降雨量>6.35 mm/h;小雪为降雪量≤1.27 mm/h,中雪降雪量1.28~2.54 mm/h,大雪降雪量2.55~12.7 mm/h,暴雪降雪量>12.7 mm/h;松软雪中轻度为厚度0~10 mm,中度为厚度10~20 mm,重度为厚度>20 mm;轻雾为水平能见度1.00~10.0 km,雾为水平能见度0.5~1.00 km,大雾为水平能见度0.20~0.50 km,浓雾为水平能见度0.05~0.20 km,强浓雾为水平能见度<0.05 km。 表4 不良天气和路面环境下的绿灯最大延长时间纵坡坡度/%天气大雨暴雪冰雪混合强浓雾-71462012317-11-注:“-”代表该条件下进口道不存在黄灯困境区。 本文利用先进检测器可获取车辆实时轨迹特征的优势,提出基于黄灯困境区车辆安全性的相位最佳安全切换策略,弥补因传统感应控制策略受限于固定检测器精度,超速车辆和达到最大绿灯时间的车辆可能在黄灯启亮时陷入困境区的不足。 本文主要创新点在于:①论证了传统感应控制方式确实存在困境区内有车的情况,以及将相位绿灯切换为黄灯的可能性;②为消除这种可能性,本文基于先进检测器可采集车辆实时轨迹数据的优势,从理论层面提出基于黄灯困境区内车辆安全需求的相位切换方法,用以规避黄灯困境区的风险。本文的不足在于忽略了检测器位置、路口视距视区等因素对于困境区范围的影响,这些因素可能会对安全绿灯时间的精度产生影响。1.2 黄灯困境区参数

2 传统动态绿灯控制策略分析
2.1 黄灯困境区边界的动态特性
2.2 黄灯启亮时刻分析

3 相位切换时机研究
3.1 相位转换过程分析

3.2 相位最佳安全切换策略


4 验证

5 结论
猜你喜欢
作文周刊·小学一年级版(2020年40期)2020-10-19重庆交通大学学报(自然科学版)(2017年3期)2017-05-17娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24中国房地产业(2016年2期)2016-03-01燕山大学学报(哲学社会科学版)(2015年3期)2016-01-05伴侣(2015年5期)2015-09-10系统工程学报(2015年3期)2015-02-28河南科技(2014年14期)2014-02-27中国火炬(2010年5期)2010-07-25数学大世界·小学低年级辅导版(2009年1期)2009-02-17
