
基于核函数的目标跟踪系统建模与仿真
2024-01-05 08:03甘志英
唐山师范学院学报 2023年6期
甘志英
(唐山学院 智能与信息工程学院,河北 唐山 063000)
目标跟踪指根据初始图像给定的目标位置和尺寸,对后续帧中的目标进行检测,预测目标运动轨迹。目标跟踪是人工智能领域重要组成部分,在无人驾驶、安保监控、视频索引、图像检索等方面具有非常广泛的应用。
近年来目标跟踪算法的研究逐渐转向判别类算法,如TLD 跟踪、IVT跟踪、相关滤波类目标跟踪等。Bolme等[1]将目标跟踪转化为求两个信号的相关问题,通过目标特征和训练出的滤波模型在频域计算得到目标位置,跟踪速度明显提高。此外,Ross等提出的IVT[2]跟踪效果好,但实现复杂,运行速度慢,不适合实时视频跟踪;Zhang等[3]使用稀疏矩阵压缩跟踪,虽然处理速度很快,但跟踪精度有待提高。
尽管上述算法在一定程度上提高了跟踪准确性,但由于训练样本有限,跟踪精度较低,且模型更新策略也存在不足。为此,本文在MOSSE算法的基础上,针对训练样本不足、分类精度差等问题,采用循环采样训练滤波器,使用核函数支持向量机对目标区域建模分类,并仿真实现目标的快速跟踪。
1 核相关跟踪算法
本文算法是利用循环矩阵结构对样本进行密集采样,提高跟踪能力。并且引入核函数处理非线性分类问题[4-7]。
1.1 引入核函数
为了提高跟踪效果,在高维空间改善分类效果,使用高斯核函数将样本xi映射到高维特征空间。
k(x,x′)=
(1)
根据岭回归,权重向量ω为
ω=∑iαiφ(xi)
(2)
其中αi为对偶空间系数。
高斯核函数满足k(x,x)=φT(x)φ(x),则分类函数可表示为:
f(xj)=
(3)
据式(2)、(3)则目标函数(1)可表示为:
(4)
其中,K为k(x,x′)循环移位构造矩阵,λ为正则化参数。
求得改进滤波器
α=(K+λI)-1y
(5)
利用循环矩阵性质得出系数向量的频域变量:
(6)
其中,∧符合表示对应频域变量
1.2 滤波响应
通过所有的训练样本x和待检测样本z构建一个核循环矩阵Kz,且Kz=C(kxz),其中kxz表示训练样本x与检测样本z生成的互相关核函数向量,C(*)表示构造循环矩阵。利用核循环矩阵Kz计算当前图像中所有待检测样本z的回归响应值,计算方式如下:
f(z)=(Kz)Tα
(7)
其中f(z)包含了所有待检测样本的响应值。利用循环矩阵对角化的性质,可以将式(7)简化:
(8)
对待检测样本z求解回归函数相当于是在kxz上的滤波操作,输出的二维响应图f(z)最大值位置就是当前帧中的预测目标位置。
1.3 更新滤波器
为增强算法跟踪鲁棒性,采用实时在线更新策略,样本目标特征和滤波器的更新:
xt=(1-η)xt-1+ηxt
(9)
(10)
其中,η为学习率,xt为第t帧样本目标特征,αt代表第t帧滤波器。将训练和滤波同时进行,以适应目标运动中的形变,实现目标的持续跟踪。
2 实验条件及方法
2.1 实验条件
用于完成文中算法的计算机硬件配置为:CPU为AMD Ryzen 7 3700U,主频2.30 GHz,内存8 GB;算法的软件开发平台为Matlab R2018b。训练相关滤波器的正则化因子λ取0.01,高斯核函数σ取0.02,滤波器更新学习率η取0.075。
2.2 实验方法
实验选择业内标准OTB2015数据集用于目标跟踪测试,数据集包含带目标位置标注的视频,并且提供了合理的评价体系[8]。
TRE评估方法:从不同帧的真实目标位置开始跟踪,对多次跟踪指标取平均值。
Precision指标:算法估计目标位置与真实位置之间的距离小于给定阈值的帧数与总帧数的比值。一般阈值取20像素。
Success指标:算法估计目标区域与真实区域重合部分与二者合并区域比值定义为重合率。重合率大于给定阈值的帧数占总帧数的比值即为成功率。一般阈值为0.5。
为了验证本文算法,从OTB2015数据集上选取8个具有尺度变化、快速运动、目标形变、旋转、复杂背景的视频序列进行测试,并使用中心位置误差和重叠率来评估算法。此外本文还与目前比较先进的跟踪算法MOSSE、CT、IVT进行对比。
3 实验结果及分析
为全面直观分析算法效果,对目标跟踪实验分别进行了定量分析、定性分析。
3.1 定量分析
所有跟踪算法对8个视频序列进行TRE测试得到的Precision指标、Success指标与跟踪处理速度见表1。不同算法的Precision曲线和Success曲线如图1、2所示,可以很明显看出本文算法明显优于其它算法。
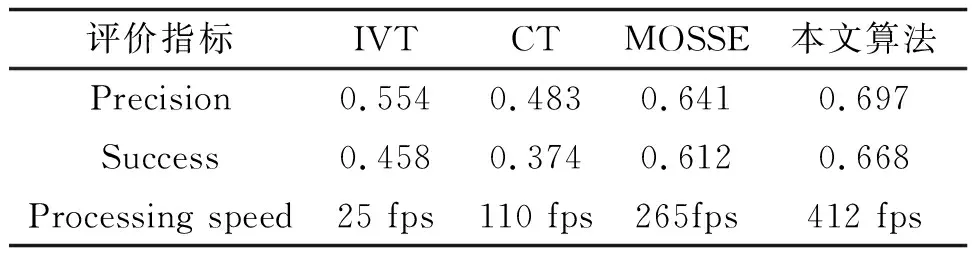
表1 算法的精度、成功率、处理速度
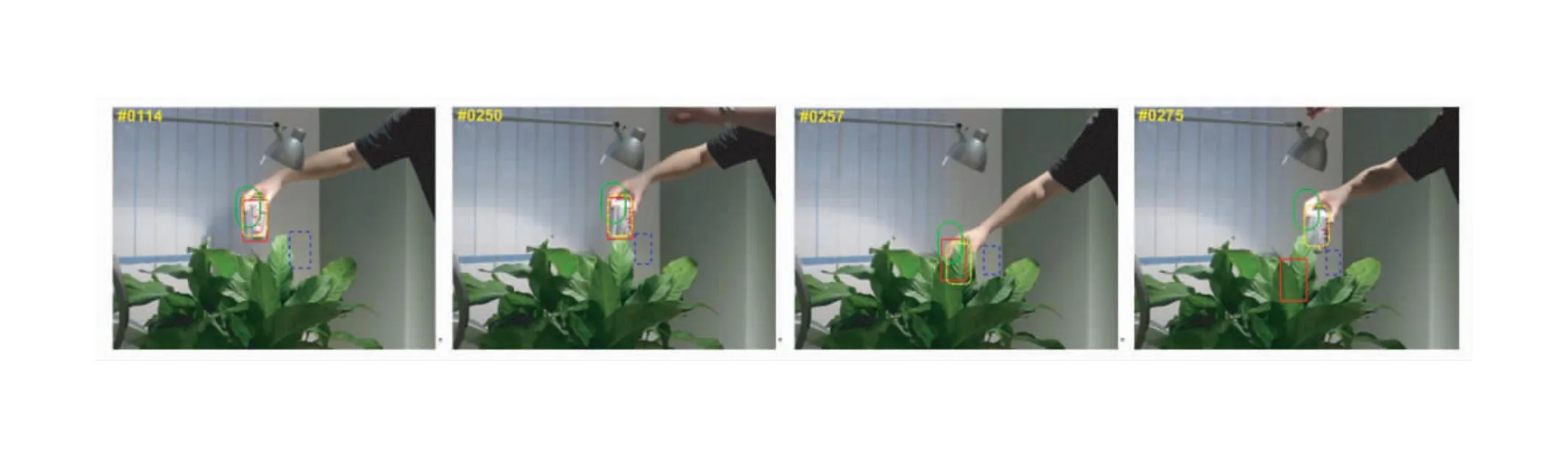
3.2 定性分析
为了更直观对比不同跟踪算法的结果,本文算法对具有快速运动、目标形变、复杂背景、尺度变化、旋转、遮挡等因素的视频序列上的跟踪结果如图3所示。其中红色方框标识MOSSE算法跟踪结果,绿色椭圆对应CT算法,蓝色虚线框标识IVT算法,黄色圆角矩形对应本文算法。
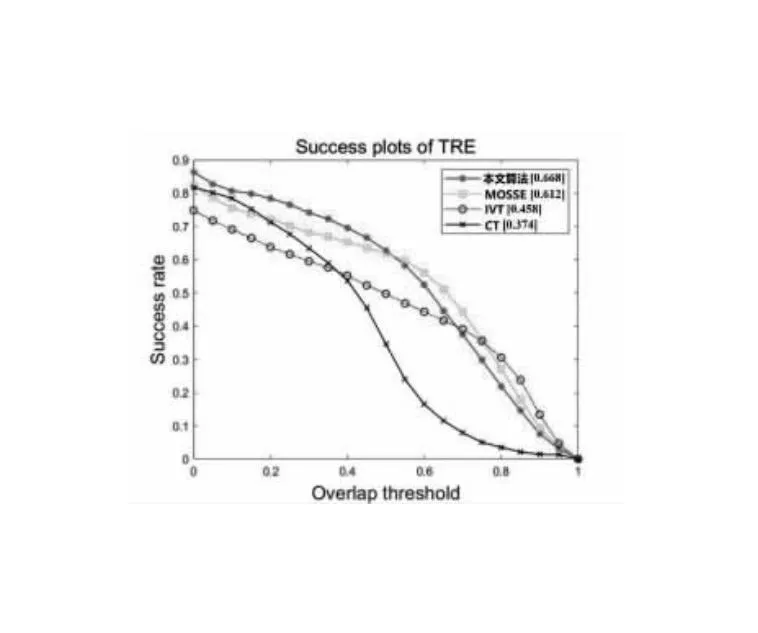
图1 Precision曲线
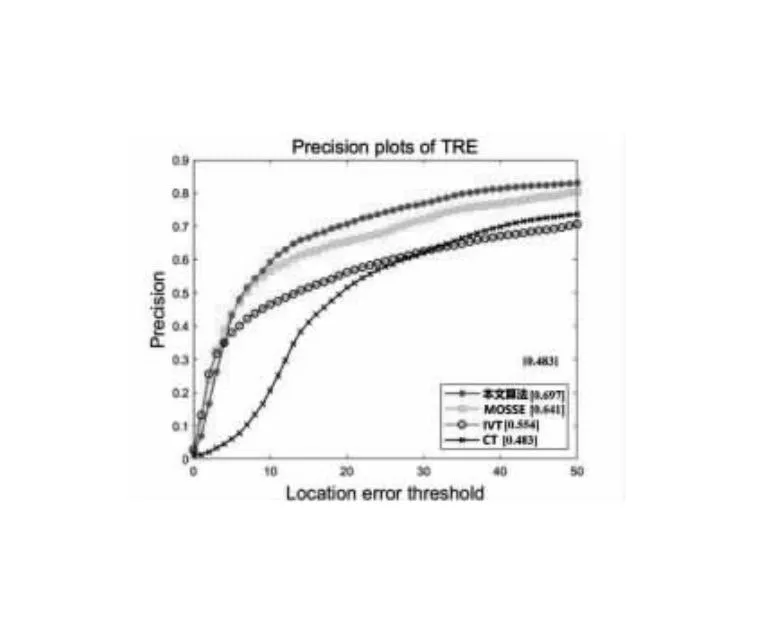
图2 Success曲线

(a)car1尺度

(b)car4尺度 光照
(c)coke旋转 遮挡

(e)football 复杂背景

(f)sufer 快速移动

(g)bolt快速移动 形变

(h)soccer旋转 遮挡 背景复杂图3 不同因素的视频序列上的跟踪结果
(1)快速运动。表现为相同时间内,目标移动跨度大,帧间偏移量大,带来计算量的增多及误差的增大,如图3(e)(g),其它算法出现了跟踪偏差,而本文算法密集采样使用卷积特征,能保持较好跟踪效果。
(2)形变旋转。在图3(g)(d)中,目标人的肢体运动带来轮廓形状变化,(c)(h)目标旋转带来其外观不同,CT(绿色椭圆框)、IVT(蓝色虚线框)算法未能很好地融合目标前帧与后帧信息,而在视频的中后段部分跟踪失败,相反本文算法在保留前帧目标特征信息的基础上,又学习了后帧目标的特征,这样在目标形变的过程中就能实现更好的跟踪。
(3)复杂背景。在图3(e)(h)中,随着目标运动,出现目标周围梯度密集变化,颜色变化剧烈,背景愈加复杂。由于四种算法对目标突出特征的描述,区别于复杂背景,跟踪效果良好。(h)中后段目标在被遮挡的情况下其它算法容易出现跟踪漂移。
(4)尺度问题。从图3(a)(b)中看出,目标尺度和姿态变化。四种算法跟踪良好,但本文算法未能随目标尺度变化而调整跟踪窗大小,说明其欠缺尺度适应性。
(5)遮挡问题。图3(c)(h)序列存在遮挡。本文算法使用高斯混合模型,在更新时,受到的影响较小,仍能够正确跟踪目标,具有较强的旋转适应性。其它算法目标被遮挡后,将错误信息更新到模型中,产生了较大误差。
(6)光照变化。图3(b)序列中,目标从高光照进入阴影区再到高光区,本文算法使用卷积特征表示目标的外观模型,能正确跟踪目标,说明具备一定光照适应性。
4 结论
在相关波跟踪算法的基础上,采用密集采样扩充训练样本集,借助核函数岭回归在高维空间对目标区域分类以实现目标跟踪的方法,克服了传统相关算法特征表达不足造成的跟踪漂移等问题,在改善跟踪精度的同时,通过频域运算,提高了跟踪速度。
在OTB2015数据集上,与多种常见跟踪算法比较,本文算法在一些复杂场景下,具有较强的鲁棒性、精确性及较高的处理速度,整体综合性能较好,但不能自适应跟随目标尺度变化,调整跟踪窗大小,缺少跟踪窗的尺度适应性。未来研究将在尺度变化场景下,朝着实现稳定的目标跟踪方向展开进一步研究,在实时性要求下,提高跟踪效能。
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
科技创新与应用(2020年6期)2020-02-29
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
北京理工大学学报(2016年6期)2016-11-22
电视技术(2016年9期)2016-10-17
系统工程与电子技术(2016年7期)2016-08-21
系统工程与电子技术(2016年7期)2016-08-21
太空探索(2016年5期)2016-07-12
火控雷达技术(2016年2期)2016-02-06
