水声通信及网络技术综述
2024-01-27 07:20杨健敏王佳惠刘凇佐
电子与信息学报 2024年1期
杨健敏 王佳惠 乔 钢 刘凇佐 马 璐 何 鹏
①(中山大学海洋工程与技术学院 珠海 519000)
②(哈尔滨工程大学水声技术重点实验室 哈尔滨 150001)
③(工业和信息化部海洋信息获取与安全工信部重点实验室(哈尔滨工程大学) 哈尔滨 150001)
④(哈尔滨工程大学水声工程学院 哈尔滨 150001)
⑤(南方海洋科学与工程广东省实验室(珠海) 珠海 519000)
⑥(极地环境立体观测与应用教育部重点实验室(中山大学) 珠海 519000)
1 引言
近年来,随着海洋强国战略的提出,国家大力发展海洋事业,作为水下无线通信的重要组成部分,水声通信及网络技术引起广泛关注。水声通信(Underwater Acoustic Communication, UAC)不仅在民用领域有极大应用,在商业领域与军事领域等诸多方面也发挥着重要作用[1-4]。民用领域,水声通信及网络技术可用于监测水下环境和收集海洋数据。商业领域,该技术广泛用于遥控、遥测、数据回传、协同作业等。军事上,水声通信及网络技术也发挥着巨大作用,可用于寻找水下水雷、保护港口和潜艇、监控和监视等[5-8]。随着各个海洋大国科技水平的提高,构建空天地海潜一体化网络的进程势不可挡[9]。目前,空天地海的信息传输与集成技术已相对成熟,对海洋信息的需求也愈发强烈,要提高对海洋信息的获取能力,就离不开水声通信及网络技术的发展。
水声通信技术在发送端把信息加载到声波中,通过声波将信息传输到接收端,水声通信是目前应用于水下环境中最成熟可靠的无线通信方式。陆地无线环境中电磁波通信和光通信占主导地位,但是在水下,这两种通信方式的表现不尽如人意。电磁波在水下衰减严重,且频率越高衰减越大,因此在水下,电磁波只能实现短距离的高速通信,不能满足远距离水下通信与组网的要求[10]。水下光通信通常使用蓝绿激光,这是因为蓝绿色激光(波长为470~570 nm)在水下传输时能量衰减很小,其衰减率约为0.155~0.5 dB/m[11]。水下激光通信工作频率高,传输速率可达千兆,传输时延低。但是,水下光损耗大,对水介质有很高要求,具有极强的方向性,而且海洋生物会对水下光通信造成极大干扰,建立长距离通信难度极大。声波在水下传播的速度可达1 500 m/s, 1 Hz~50 kHz的声衰减系数为10-4~10-2dB/m[12,13],低频率、高功率的声波可在水下传播数千公里,是实现水下远程无线通信的唯一手段[14],因此,水声通信成为水下长距离通信的最佳和唯一选择。各种水下通信方式的优缺点如表1所示。

表1 各种水下通信方式的优缺点
随着点对点水声通信技术发展日趋成熟,以及复杂应用场景对水下信息传输技术提出更高要求,水声通信网络(Underwater Acoustic Communication Network, UACN)技术得到了越来越多的关注与发展。水声通信网络与水声通信一样,在水下依靠声波传递信息。从硬件角度可分为广义和狭义两种:广义水声通信网络是由布放在水底、水中的通信节点(包括固定的通信节点和装载在移动平台的通信节点)、水面浮标节点、水面移动平台、岸基通信平台以及通信卫星等构成的,其结构如图1所示;狭义水声通信网络由水下及水面部分组成,包括水底、水面以及水中的固定通信节点和自主水下潜器(Autonomous Underwater Vehicle, AUV)、水面浮标等搭载的水声通信节点构成。无论广义水声通信网络,还是狭义水声通信网络,相较于点对点水声通信,都能够增加通信覆盖范围,提升通信效率等,以适应更多、更复杂的任务场景[15]。本文中提到的水声通信网络都是指狭义水声通信网络。水声通信网络为确保能够有效而可靠地传输数据,需按照一定的网络协议运行。将网络进行分层可降低网络协议设计的复杂性,参考国际标准化组织提出的开放系统互联(Open Systems Interconnection,OSI)模型和传输控制协议/因特网互联协议(Transmission Control Protocol/Internet Protocol,TCP/IP)[16],实际应用中通常将水声通信网络层次划分为物理层、数据链路层和网络层,图2为UACN, OSI以及TCP/IP 3种协议体系的对比。

图1 广义水声通信网络
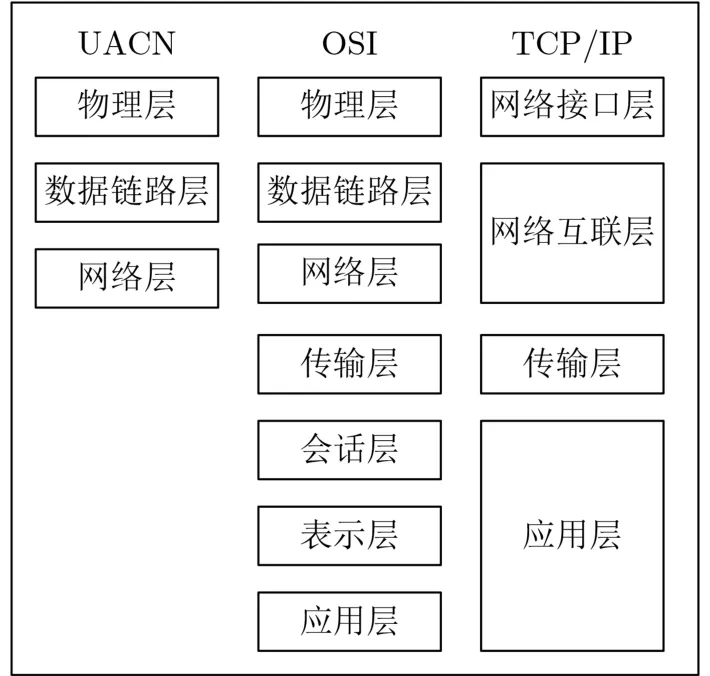
图2 3种协议体系对比
本文安排如下:第2节陈述了国内外水声通信及网络技术发展及研究现状,第3节梳理了水声信道的特点,第4节归纳与介绍了水声通信技术,第5节讨论水声通信网络技术,最后在第6节进行总结与展望。
2 水声通信及网络技术的发展及研究现状
2.1 水声通信技术的发展及研究现状
2.1.1 水声通信技术的发展
水声通信技术的早期历史可以追溯到20世纪50年代,经过几十年的发展,已经有了显著进步。当前,水声通信主要向高有效性和高可靠性发展。如图3所示,与无线电通信从1~5G的发展历程相似,水声通信技术的发展趋势概括地说是从模拟通信到数字通信,从非相干通信到相干通信,从单载波通信到多载波通信,从点对点通信到网络化通信。
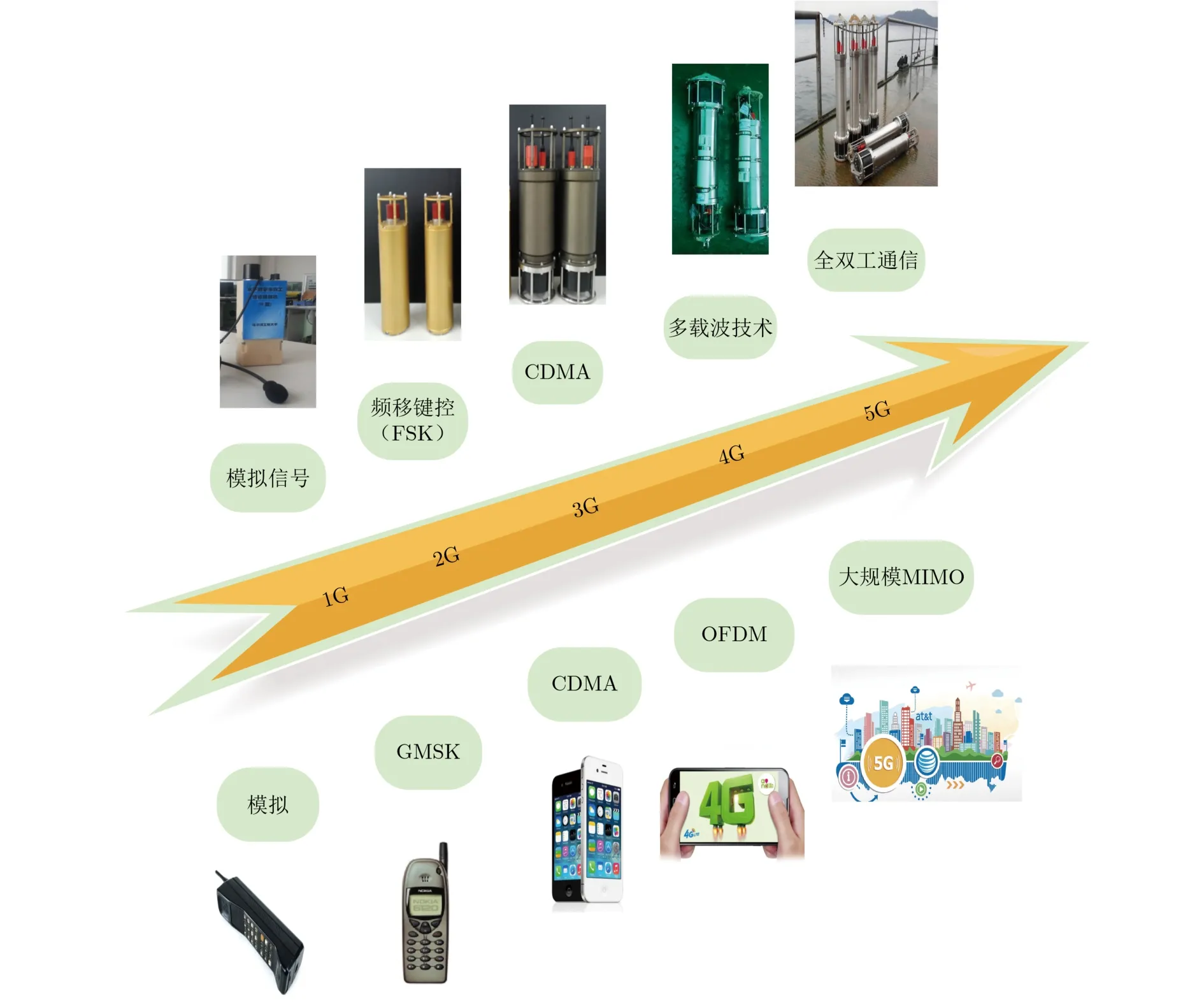
图3 水声通信技术的发展历程
如今,水声通信已经发展到以全双工通信为代表的“5G”技术[17]。水声通信发展初期,使用的大多是幅度调制(Amplitude Modulation, AM)和单边带调制(Single-Side Band, SSB)水下电话传递模拟信号。20世纪80年代早期,水下数字频移键控(Frequency Shift Keying, FSK)技术得到应用,80年代后期出现相干水声通信[18]。90年代,由于数字信号处理(Digital Signal Processing, DSP)芯片技术和数字通信理论的发展,一系列复杂的信道均衡技术的实现进一步推动相干水声通信技术的发展[19]。20世纪90年代,美国Scripps海洋研究所率先提出了单载波相干水声通信技术[20]。从20世纪90年代中后期开始,以正交频分复用技术为主的多载波相干通信技术逐渐广泛应用于水声通信[21]。进入21世纪,多入多出(Multiple-Input Multiple-Output, MIMO)、全双工等技术的使用进一步提升了水声通信技术性能[22]。
2.1.2 国外研究现状
在水下,声波频率越高,衰减越大,因此水声通信可用带宽和通信距离相关:远距离带宽小,速率低;近距离带宽大,速率高。本节及下节介绍国内外水声通信技术研究现状,从近距离通信和中远距离通信两方面介绍,近程通信的通信距离为0~10 km,中远程通信的距离大于10 km。
国外水声通信技术开展较早,美国、日本、俄罗斯、新加坡、欧盟等国家和组织都投入了大量人员与经费进行水声通信技术研究。近程水声通信方面,文献[23]使用时间反转判决反馈均衡器和正交幅度调制(Quadrature Amplitude Modulation,QAM)技术,在海试中,以60 kbit/s的数据速率实现了3 km的可靠通信。文献[24]使用128QAM在3.6 km距离实现70 kbit/s的最大数据速率,成功将数据从水下移动无人平台传输到水面舰艇。
中远程水声通信方面,2013年,文献[25]在北冰洋采用中心频率为900 Hz的相移键控(Phase Shift Keying, PSK)信号,在560 km的距离上实现数据速率29.6 bit/s的通信导航。将直接序列扩频与双差分编码技术进行结合,实现了550 km内的深海远距离通信,通信速率为6.5 bit/s,误码率可达4%以下。文献[26]使用大孔径水平天线阵列来替代垂直阵列实现空间分集并且结合二进制相移键控调制(Binary Phase Shift Keying, BPSK)和正交相移键控调制(Quadrature Phase Shift Keying, QPSK),提升角度分辨率和降低误码率,最大传输范围为550 km2,通信速率可以达到50 bit/s。文献[27]采用自适应时间反转判决反馈均衡器(Adaptive Passive Time Reversal-Decision Feedback Equalizer, APTR-DFE)与MIMO技术,在13.5 km的距离实现了较低误比特率的高速水声通信,误比特率0.1%时,通信速率可达30.21 kbit/s,误比特率1%时,通信速率可达37.53 kbit/s。
2.1.3 国内研究现状
我国水声通信技术研究开展相对较晚。近些年,随着对开发海洋的需求日益迫切,我国建设海洋强国的国策提出,越来越多的科研院所与公司投入到水声通信技术研究当中,科研院所包括中科院声学研究所、中船重工715所、北京长城电子装备有限责任公司、哈尔滨工程大学、西北工业大学、浙江大学、厦门大学、中山大学等,公司包括嘉兴中科、苏州桑泰、深圳智慧海洋、哈船海信等。在国家的大力支持和科研工作者的努力攻关下,我国水声通信技术取得诸多突破与进展。
近程水声通信方面,针对传统Pattern时延差(Pattern time Delay Shift, PDS)编码水声通信速率较低的问题,在传统PDS水声通信基础上,提出基于分频带的高速PDS通信方案,实验得出该方法可达到1 200 km·bit/s距离速率积。文献[28]提出单阵元无源时间反转镜和虚拟时间反转镜的均衡算法,可有效减少符号间干扰。在收发相距1.5 km,相对速度0.84 m/s,有效通信速率5.03 kbit/s的条件下开展外场实验,数据处理结果显示所提均衡算法可有效降低误码率。文献[29]针对复杂多变的浅海水声信道提出一种自适应水声通信调制方案,根据多径数、多普勒频偏等对信号进行评估自适应选择合适的调制方式与参数,并在海深8 m,通信距离1 km的情况进行外场实验,实验结果表明在信道条件较差时,所提方案能降低误码率,提升等效通信速率。2022年,文献[30]自主研发的全平台适配水声通信机能够实现通信距离6.2 km、通信速率42.8 kbit/s的分布式多输入多输出(Multiple Input Multiple Output, MIMO)水声通信数据传输,成功实现265.36 kbit/(s·km)的通信速率距离乘积。
中远程水声通信方面,文献[31]提出了一种基于深海远程通信的LT-Turbo均衡方法,实现传播距离为69 km时,误码率低于10-5的深海远距离通信。文献[32]设计了一种全海深水声通信机,采用单载波相干水声通信技术,相干解调算法采用了时频域双向Turbo均衡器结构。2018年该通信机在马里亚纳海沟进行海试,实现了水下10 500 m到水面的高速水声通信。中国科学院声学研究所先后承担了“蛟龙”号、“深海勇士”号、“奋斗者”号等深潜器的水声通信系统研制任务,实现了超万米的全海深水声通信与海天对话等,性能指标达到世界先进[33]。2021年11月,哈尔滨工程大学乔钢团队[34]基于DSP的正交频分复用(Orthogonal Frequency Division Multiplexing, OFDM)与扩频水声通信技术,使全海深AUV “悟空号”在与母船直线距离超过15 km的马里亚纳海沟深处,实现与母船的远程可靠水声通信,上行峰值通信速率2 003 bit/s,数据包接收正确率超过93%。
水声通信系统的能力与信道条件、发射功率、平台环境、接收阵列等多个因素有关。通常采用通信距离与通信速率的乘积来表示有效性。20世纪90年代中期,文献[33]浅海环境的水声通信实现了40 km·kbit/s的速率和距离乘积,代表了当时水声通信有效性的较高水平。经过近些年的发展,文献[27]已经将这一指标提升到500 km·kbit/s的量级,相较于20世纪90年代提升了10余倍。水声通信技术的快速发展,一方面可以满足越来越多的应用需求,另一方面也极大促进了水声通信网络的发展。
2.2 水声通信网络的发展及研究现状
如上节所述,近年来物理层水声通信技术发展迅速,高性能水下声学调制解调器相继问世,为水声通信网络的发展奠定了坚实的基础,水声通信网络的构建成为可能[19]。同时,人类对海洋探索与利用的脚步不断加速,水声通信网络研究因此也越来越受到关注。自1990年以来,美国、欧洲和中国等国家、地区相继开展了水声通信网络仿真与试验研究,通过计算机仿真和外场实验等方式验证网络协议和设备性能。这些水声通信网络的研究成果可广泛应用于水下军事和水下环境感知监测等领域。
2.2.1 水声通信网络的发展
水声通信网络总体上经历了从集中式到分布式再到自组织,从单跳网络到多跳网络,从静态网络到移动节点参与的动态网络的发展历程。美国的Seaweb是目前世界上已知规模最大、最具代表性的水声通信网络之一,通过Seaweb网络的发展能直观看出水声通信网络的发展。1998年开始进行的美国Seaweb98,网络节点数量为10,主要目的是判断低成本、高覆盖面积的水声通信网络的可行性。接下来两年的实验增加了节点数量,并优化数据链路层和路由层协议的控制。在Seaweb01中,反潜艇探测节点探测到潜艇的数据通过中继节点发送到水面浮标节点,浮标节点再将信息转发给陆地指挥中心。Seaweb03包括3个AUV, 6个中继节点和2个浮标,Seaweb04的节点数量为40,测试了分布式拓扑结构和动态路由,以及路由重建。Seaweb08的节点数量较少,只有19,但实现了节点的集中式控制。Seaweb09实现中继传输,建立了小规模的海洋监测试验网络[35]。Seaweb10中网络由1个水面浮标节点,6个中继节点和2个传感器监测节点组成,验证了水声通信网络通信链路中数据传输的可靠性。虽然在2010年以后,鲜有公开文献报道Seaweb的最新进展,但该网络是现代水声通信网络的雏形,为后续相关研究提供了经验与基础。Seaweb网络的发展历程如图4所示。

图4 Seaweb网络的发展历程
2.2.2 国外研究现状
继Seaweb网络后,欧美等国家相继开展水声通信网络仿真与实验研究。近海水下持续监视网(Persistent Littoral Undersea Surveillance Network, PLUSNet)[36]是美军研究的典型水下无人作战网络系统之一,由携带水声通信机的多个无人潜航器(Unmanned Underwater Vehicle, UUV)组成,网络内UUV基于水声通信可自主做出基本决策。2013年,由美国康涅狄格等大学联合开展的水下网络试验台(Ocean Testbed for Underwater Networks Experiments, Ocean-TUNE),旨在解决水声通信网络仿真受限、没有共同实验验证平台等问题,该网络由部署在4个不同海域的实验平台组成。欧盟方面,在海洋科学与技术计划 III(MArine Science and Technology program III, MAST III)等项目支持下开展了一系列研究:其中包括远程浅海水声通信链路(long range shallow water ROBust acoustic communication LINKSS, ROBLINKS)的设计,以及适用于浅海中长距离高速率和高鲁棒性的通信协议研究;Sunrise是由欧美研究院校和机构共同合作建立开展的水声通信网络项目[16],经过对水下进行感知、监测和开发,设计了名为SUNSET的新网络协议系统以及专为水下环境设计的航行器平台。日本方面,2016年,国家地球科学和抗灾能力研究所开始运营日本海沟沿岸地震和海啸海底观测网络(S-net),该网络由海底电缆、海底水声通信网络节点以及地震仪等观测装置组建而成[37]。
2.2.3 国内研究现状
国内水声通信网络相关研究起步较晚,早期研究人员主要利用NS2, OPNET, MATLAB等仿真工具模拟对水声通信网络进行仿真分析,近年来发展迅速,已有多家单位开展外场试验。中国科学院声学研究所于2008年和2009年在浙江千岛湖完成4~7个节点的自组织水声通信网络,使用自研小型化、低功耗通用水声通信节点,传输实时语音、图像和传感器监测数据,通信速率达8 kbit/s,误码率低于10-5,端到端最长4.1 km[16]。中船重工715研究所进行了基于集中式拓扑结构的3节点组网测试,验证节点值、链路层协议等[38]。西北工业大学开发了海空天跨介质通信网络,5节点构成的水声通信网络具有网络自定位功能[39]。2014年,在863项目水声通信网络节点及组网关键技术支持下,由中科院声学所牵头,中船重工715研究所、哈尔滨工程大学、浙江大学等单位共同参与,搭建了13个水声通信节点的水声通信网络,开展为期45天的规范化海上实验,为我国水声通信网络设备研制规范化、标准化奠定基础[16]。此后,国内有多家单位开展大规模水声通信网络实验,如深圳智慧海洋公司于2020年实现20节点固移结合的水声异构网络;哈尔滨工程大学于2022年6月成功开展包括25套潜标水声通信系统,3套浮标水声通信系统,2套船载甲板单元及多套搭载于水下平台的水声通信终端的大规模、面向应用水声的通信网络,在恶劣海况、部分终端高移动性的条件下,实现千平方公里级面积覆盖,网络单跳最长距离超过20 km,最高跳数5跳。
由上文可以看到,无论国内国外,水声通信网络技术研究初期,大多以软件仿真为主,仿真内容包括数据链路层协议、路由协议、网络安全等。随着水声通信技术大幅发展,水声通信网络技术理论逐步积淀,以及人们对水声通信网络应用场景与方式认知理解愈发深刻,水声通信网络领域逐步由理论仿真走向外场实验。这些实验中,网络节点数量由少到多,网络拓扑由简单到复杂,网络内协议由单一到复合,网络内节点类型由同构到异构,网络应用范围从单纯水下到跨域组网。如今,水声通信网络虽然还有诸多不完善尚待研究之处,但已能在实际场景中得到应用,解决问题,显示出巨大的研究价值和应用前景。
3 水声信道的特点
水声通信本质上是无线通信的一种,通信系统中,信息在发送端与接收端传输的过程中必然要经过信道,而在水声通信与网络中,声波从发射端到接收端经历的环境称之为水声信道。水声信道通信带宽受限、水下声速慢、传输衰减大等自身局限性和海洋环境复杂的时变空变影响、多普勒效应显著、多径传播复杂等因素共同影响,是无线通信领域中最为复杂多变、难度最大的信道之一,是影响水声通信和组网性能的重要因素[40]。具体来说,水声信道具有以下特点。
3.1 传输时延大且时变
与无线电在空气中的传播速度相比,声波在水下的传播速度比无线电传播速度低5个数量级,大约是1 500 m/s[41],这就导致声波的传输时延很大。声速是影响声波在海洋中传播的最基本的物理参数,与温度、盐度和静压力等多个因素有关。通常,温度越高,盐度越大,压力越大,声速增大;同时,以上参数的变化使声信号在水中的传播延迟是动态的,造成水下声信号传输时延大且时变。
3.2 通信带宽受限
受水下声波传输衰减吸收等特性影响,相比于射频无线电通信的通信带宽,水声通信带宽受到了非常大的限制,典型的声学调制解调器工作带宽只有几千赫兹到几万赫兹。在1~10 km的短距离水声通信中,系统工作带宽大概在几十千赫兹的数量级,在10~100 km的远距离水声通信中,可用系统工作带宽只有几千赫兹以下[40]。
3.3 传播损失大
传播损失是指声波在传输过程中出现的衰减损失和扩散损失。衰减损失是因声波被吸收、散射和泄漏等因素导致的损失。其中,吸收损失是主要因素,它随着声波频率和传输距离的增加而增加。扩散损失则是由于声波波面扩散而导致声能扩散的损失。常见的扩散损失包括在深海环境下点声源的球形扩散(全向扩散)以及在浅海环境下的柱状扩散(仅在水平面上扩散)。随着传输距离的增加,声波传播损失也会增加[42]。
3.4 噪声干扰严重
水下噪声可分为人为噪声和环境噪声。人为噪声在靠近人类活动附近区域较为明显。而环境噪声是水声信道中的一种干扰背景场[43],主要包括潮汐、海面波浪、地震活动、生物群体等海洋中的噪声源,在不同时间和地点存在明显的变化,它们对系统接收信噪比的限制影响严重。由于受到人为噪声和环境噪声的同时作用,水声通信系统的接收信噪比一般较低,严重的噪声干扰极大地影响着水声通信及组网系统的性能。
3.5 多径效应
声波在传播过程中受到海水分层介质的折射和海面、海底的反射等影响,因此在声源与接收点之间存在多条先后到达接收机的不同路径[44],这种现象称为“多径效应”。多径效应是导致信号快速衰落的一个重要因素,几乎存在于所有陆基和水下通信技术中。在时域上,多径效应引起信号的时间扩展,在频域上,则会造成频率选择性衰落[45]。水声多径信道不仅使信号时域波形和频谱产生畸变,而且致使时延可达到秒量级,引入了很大的码间干扰。
3.6 多普勒效应
发射端、接收端二者之间发生相对移动,便会产生多普勒效应[46]。多普勒效应对水声通信造成的干扰要远远超过对无线电通信的干扰,其主要原因在于水下声波传播的速率远低于空气中电磁波传播的速率,即使很小的相对速度也会导致严重的多普勒频偏[4]。除通信节点之间的相互影响外,波浪起伏的海洋反射的声波和湍流的声波折射的声波都会引起不可忽视的多普勒频移,对水声通信与组网造成一定影响。
3.7 能量受限
由于水下声波衰减比空气中无线电信号衰减大得多,因此水声通信节点的发射功率通常需要比陆地无线电通信设备高一个数量级[47]。除此之外,水声通信网络节点能量十分有限,尺寸相对较大,加之水下环境复杂恶劣,水声通信节点很难更换电池或对电池充电,虽然有些位于浅海的水声通信网络节点可以利用太阳能充电,但是获取的能量也十分有限,一旦能量耗尽,节点将失效。
水声通信与组网究其本质是无线通信和组网的一种,信道是整个通信和组网链路中非常重要的组成部分,通信的核心工作之一就是要使整个通信系统与信道相匹配,信道质量的好坏会极大地影响通信组网实现的难易和质量。我们看到,相比于空气中的无线电信道或者各类有线信道,水下声信道都复杂恶劣得多,很多在无线电通信中成熟的理论和算法,并不能直接应用于水声通信与组网中。无论是声波在水下传播的物理特性,还是水下的环境噪声与人为噪声等,都是人们在水声通信与组网过程中需要攻克的难关,即便水声通信与组网技术经过了几十年发展,克服信道对水声通信与组网带来的影响仍然是摆在我们面前最需要解决的问题。
4 水声通信技术
引言中提到,水声通信技术在发送端把信息加载在声波上,通过声波将信息传输到接收端。而将信息加载到声波中以及将信息从声波分解出来离不开物理层的调制与解调。物理层定义了通过连接水声通信节点的物理链路信道传输比特的机制,发送端将比特流调制为声信号以在水声信道中传播;接收端将收到的声信号解调,恢复成原始的比特流,并向协议栈上层提供信息。水声通信中,可以根据解调时是否还原同频同相的载波来定义为水声相干通信和非相干通信,本节将以此分类介绍水声通信技术;同时,随着对水声通信技术需求逐渐增加,以应用为导向的新型调制技术也逐渐发展,这也是本节将要介绍的另一部分内容。
4.1 非相干水声技术
水声通信技术诞生于20世纪中叶,最开始采用模拟调制方式,随后逐步向数字调制过渡,到20世纪70年代,数字调制成为水声通信的主流通信方式。在数字调制技术中,频移键控(Frequency Shift Keying, FSK)、幅移键控(Amplitude Shift Keying,ASK)和相移键控(Phase Shift Keying, PSK)3种调制技术是3种重要的调制方式,其衍生出的相关技术也驱动水声通信技术的全方位发展[20]。早期的数字水声通信系统大都采用FSK调制方式,并且采用非相干调制技术,非相干水声通信解调不需要还原或生成同频同相的载波。
2FSK调制系统中,每个码元只传输1个比特信息,多进制频移键控调制(Multiple Frequency Shift Keying, MFSK)是对2FSK的改进,MFSK中1个码元传输多个比特的信息,采用多个不同频率的载波来传输信息,能够有效减少远程浅海信道由于缓慢时变引起的信号相位信息损失,同时在带宽资源受限的水声通信中,可提高频带利用率。由于水声信道带宽资源十分有限而期望传输量较大,且单载波无法改善MFSK调制对频带的利用率不足的缺点,多载波MFSK调制被提出。多载波MFSK将MFSK调制与多载波技术相结合,兼顾MFSK稳健性的同时,能够有效提高系统通信速率以及抗多途能力。文献[48]基于OFDM-MFSK水声通信系统,提出了一种差错控制编码方法,可以减少水声通信系统的实现成本,并且确保通信可靠性和实时性。
4.2 相干水声通信技术
水声通信技术发展初期,非相干调制技术长期被认为是克服水声信道多途扩展的最佳选择,但它在带宽严重受限的水声信道中很难实现高速率数据传输。从20世纪80年代开始,为满足水下数据高速传输的需求,如何提高水声通信信道利用率成为人们研究和关注的热点问题,相干调制技术被引入水声通信领域并得到迅速发展,其带宽利用率比非相干技术有了显著提升[49]。接下来从单载波相干水声通信技术、多载波相干水声通信技术、扩频水声通信技术3方面展开介绍相干水声通信技术。
4.2.1 单载波相干水声通信技术
相干水声通信发展的初期阶段一般采用诸如PSK, QAM等单载波调制方式。具有里程碑意义的是,1993年,美国东北大学的Stojanovic等人[50]提出了基于判决反馈均衡(Decision Feedback Equalization, DFE)和2阶数字锁相环(Digital Phase Lock Loop, DPLL)的相干水声通信接收机结构,能够一定程度上解决时变水声信道匹配和码间干扰问题。为应对复杂的信道,提升系统的通信性能,单载波通信系统设计高效可靠的信道均衡器。但对于时延扩展较长的水声信道,需要更高阶数和更为复杂的信道均衡器,但这也增加了整个通信系统实现的复杂度,这是信道均衡技术面临的主要问题[51]。单载波通信系统通常根据接收机采用的均衡方式,可以分为常规接收系统和迭代接收系统。常规均衡与迭代均衡的实现方式又可以分为自适应信道均衡和基于信道估计的均衡[52]。
文献[31]提出了一种基于Ludy Transform编码(LT编码)的联合迭代均衡译码方法,能够在深远海水声通信中灵活控制编码速率,并通过联合迭代均衡译码进一步提高通信效率。针对单一均衡算法和单一方向Turbo均衡器存在的误差传递现象,文献[53]设计了基于迭代Kalman均衡器与改进成比例归一化自适应均衡器相结合的混合双向Turbo均衡器。文献[54]提出一种结合信道短化技术和基于L1范数宽线性变遗忘因子RLS自适应均衡技术判决反馈接收机算法,该算法能有效降低算法的复杂度。陈芳炯等人[55]提出一种零值吸引稀疏控制成比例最小误码率判决反馈均衡算法,相较于基于最小均方误差准则的锁相环相位追踪算法,收敛速度更快,误码率性能更优。
4.2.2 多载波相干水声通信技术
单载波相干水声通信能够提升非相干水声通信的通信质量,但是其均衡器的复杂度随通信速率的提高大幅上升,限制了其应用。多载波技术将高速串行传输数据转化为低速并行传输数据,均衡算法复杂度较低,能够有效增加码元持续时间,显著降低码间干扰,具有一定抗多径的能力,适用于水声通信中信道比较稳定且对数据传输速率要求较高的中短距离通信场景[56]。本文以当前研究较多的多载波相干水声通信技术-OFDM技术以及结合MIMO的新型多载波调制技术进行介绍。
OFDM技术利用相互正交的子载波,把通信带宽分成子通道,对数字信号进行串并转换之后,将其映射到子载波振幅与相位。该技术中,每一个子信道虽然在频率上是互相叠加的,但是它可以利用每个子载波间的正交性来避开载波干扰,所以频率利用率得到极大提升。此外,由于在串并转换之后,每一个字符的周期都比较长,通过预先添加的保护区间,OFDM技术可以很好地抑制多径延迟所造成的时间弥散。所以,基于OFDM的水声通信技术能够达到提升通信速率的效果,并能一定程度上抑制多径干扰。但OFDM技术对频率偏移十分敏感,受多普勒效应影响严重,容易导致比特错误甚至传输中断[57]。2017年,马璐等人[58]针对水声正交频分复用异步多用户系统提出一种基于滑动迭代的异步多用户接入方法,实验表明滑动迭代异步接收算法在多径扩展18 ms、异步到达时延大于或等于循环前缀1.5倍时实现了两用户异步接入的可靠通信。文献[59]提出一种采用全双工声通信和OFDM技术实现多跳水声通信网络数据的同时传输和接收数据传输方法,在多跳水声通信网络中实现无碰撞高速全双工通信。
MIMO是一种利用多个天线实现在发送端和接收端之间进行信号传输的调制技术,该技术利用子信道间的相互独立性获得额外的自由度,从而实现并行传输独立数据流,提高数据传输速率。MIMO和OFDM的结合是解决水声信道频率选择有限和带宽资源紧张的低复杂度方案,MIMO-OFDM系统与动态变化快且带限非常大的水声信道较为适配[60]。但是在MIMO-OFDM水声通信系统中,由于信道间的相互干扰和水声信道严重时延扩展产生的频率选择性衰落,系统的通信误码率仍然较高。针对这一问题,文献[61]研究了空频编码的MIMO-OFDM通信,提出空频迭代信道估计与均衡(Spatial Frequency Iterative Channel Estimation and Equalization, SFICEE)方法,该方法能够较好降低误码率。
4.3 新型水声通信技术
近年来,随着人们对海洋开发探索愈发深入迫切,以面向应用需求为导向的研究趋势也愈发明显,因此也催生出多种新型水声通信技术。目前受到广泛关注的有扩频水声通信、带内全双工水声通信、仿生水声通信、正交时空频水声通信等技术。
4.3.1 扩频水声通信技术
扩频技术是指在“伪随机”(Pseudo-Random,PR)或“伪噪声”(Pseudo-Noise, PN)序列的扩频序列控制下,将信号能量扩展分布到比原始信号带宽宽很多的频带的一种通信体制,扩频技术具有较好的通信隐蔽性与抗干扰性能[62],常用于水下稳健可靠通信。传统扩频技术可划分为4种类型:时域直接序列扩频、频域直接序列扩频、跳频扩频以及跳时扩频[63]。周锋等人[64]提出了一种猝发混合扩频水声隐蔽通信方法,该方法通过在时间上随机地发送脉冲混合调制扩频信号降低被截获概率,可以比较灵活地通过调整平均占空比来满足不同隐蔽性要求。
扩频通信虽然可靠性高,但通信速率和频谱利用率较低,多载波技术在多径干扰及符号间串扰有很好表现,并且频谱利用率高,可以将多载波技术和扩频结合在一起,即多载波扩频技术,充分发挥二者的优点,提高通信效果[63]。OFDM技术与CDMA技术的结合被称为MC-CDMA(多载波码分多址),还有上文中提到的MIMO技术与CDMA结合组成MIMO-CDMA系统,也是扩频技术的创新性发展。文献[65]针对现有直接序列扩频码分多址址(DS-CDMA)水声通信数据率低且接收复杂度高的问题,提出循环移位扩频多用户通信方法。通过基于M元调制的循环移位扩频技术来有效提高每个用户的数据率,相对DS-CDMA有着更高的带宽效率。
4.3.2 全双工水声通信技术
传统水声通信基本采用半双工的方式传输信息,通信两端的节点可以双向收发信息,但是不能同时,通信效率较低。为了满足日益增长的水下信息交互需求,能够同时、双向传输信息,大幅提升信息交互效率,并且不占用额外频带资源的带内全双工水声通信技术(In-Band Full-Duplex, IBFD)正逐步成为当前水声通信领域的一个热门课题[17]。目前,带内全双工水声通信技术尚不成熟,公开的报道以及文献中尚未出现产品级带内全双工水声通信的工程样机。但是传统全双工水声通信已经取得一些进展,乔钢教授团队[66]提出了基于矢量传感器零点抑制和收发串漏干扰同步抵消方法的全双工水声通信技术,研制出国际上首款具有全双工通信能力的单矢量水声通信机,首次从理论和实践两方面证实了该方法的有效性,解决了传统水声通信收发不能同时进行的问题,提高了通信的即时性和网络吞吐率,如图5所示,该设备采用扩频调制技术和OFDM调制技术,分别在不同频率上发送控制包和数据包,验证了全双工水声通信的可行性,该团队正进行同时同频全双工水声通信技术研究,进一步提高通信效率。

图5 全双工水声通信
4.3.3 仿生水声通信技术
水声信道的特性导致水声通信容易受到非合作方的干扰和攻击,使得保障通信的机密性和安全性成为水声通信需要考虑的重要问题。目前隐蔽水声通信的研究大致可以分为3类:低检测概率(Low Probability of Detection, LPD)通信、低识别概率(Low Probability of Recognition, LPR)通信和低截获概率(Low Probability of Interception, LPI)通信[67]。为了实现隐蔽水声通信,传统方法大多采用低检测概率技术。这种技术采用扩频等方法将信号隐藏在海洋环境的复杂噪声中,使其难以被检测到,但此类方法在近声源处信号强度依然较大[68]。与低检测技术不同,仿生水声通信是一种低识别概率通信技术,该技术利用海洋生物固有声音或人工合成的模拟声音作为通信信号,这些信号即便被探测到,非合作方也会将其判断成海洋生物声音而排除,以达到隐蔽通信[69],仿生通信的应用场景与方式如图6所示。文献[70]提出一种基于FSK的仿海豚哨声水声通信方法,为了实现水下隐蔽的通信,将通信信号伪装成海豚的哨声传递信息。宋忠长等人[71]研究了齿鲸生物声呐工作原理,为水下仿生声通信、探测和感知技术的发展提供新思路。文献[72]提出一种仿鲸叫声的伪装声呐通信波形的设计方法,成功实现仿生隐蔽通信。文献[73]通过分析白鲸回声定位脉冲串数据,建立参数可动态调整的仿生回声定位信号模型。
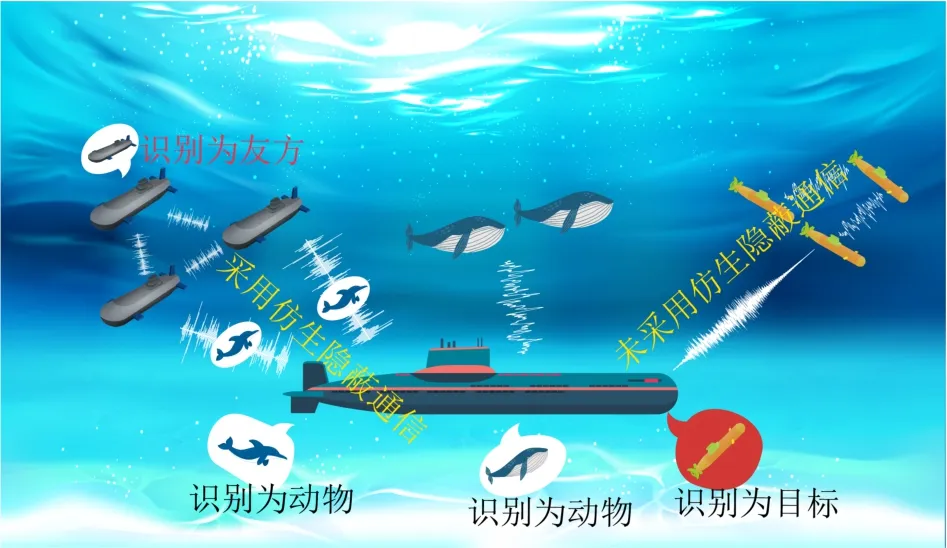
图6 仿生水声通信
4.3.4 正交时空频水声通信技术
虽然OFDM技术具有频带利用率高、抗多径传播等优点,且已经在水声通信中得到广泛应用,但仍存在着峰均功率比高、受多普勒效应影响严重、频谱泄漏等问题,在高速移动等场景中使用受限。正交时空频(Orthogonal Time Frequency Space,OTFS)调制技术是由文献[74]提出的新型调制技术,旨在解决高速移动通信系统中多普勒效应和信道干扰对OFDM的时频域造成严重影响的问题。与OFDM技术不同,OTFS通过将时变多径信道转换到时延-多普勒域调制信息。与OFDM系统相比,OTFS具有较低的峰均功率比,且能够有效抵抗多普勒效应,在高时延、高多普勒的信道条件下具备性能优势,在水下通信领域具有较大的应用潜力。文献[75]提出一种基于OTFS技术的水声通信方案,在不同多普勒因子和不同通信距离的信道条件下进行仿真,比较OTFS系统和OFDM系统的误码性能,仿真结果表明在该场景下,基于OTFS的水声通信系统误码性能优于OFDM系统。目前,针对OTFS水声通信的研究主要集中在波形设计、信道估计与均衡、接收机3方面,如何在性能和复杂度间取得平衡、如何降低水下通信环境中OTFS接收机复杂度、面向复杂水声信道OTFS系统信道估计与信号检测方法等都是十分值得关注和研究的问题,也是OTFS技术未来能够广泛应用于水声通信的关键。
5 水声通信网络技术
水声通信网络(Underwater Acoustic Communication Network, UACN)是可以对信息进行采集、处理、分类和压缩,并可以通过网络节点以中继方式回传到陆基或船基等信息控制中心的综合系统,具有大规模、自组织、动态性等特点。大规模体现在网络节点分布在比较大的海洋区域内;自组织体现在水声通信网络能够通过网络协议自主进行配置和管理,形成自动转发信息的水声通信网络系统;动态性体现在水声通信网络能够适应网络节点的动态变化。水声通信网络技术的研究主要集中在物理层、数据链路层、网络层与跨层设计等,上节介绍的水声通信技术是物理层有关技术,这节主要介绍数据链路层、网络层与跨层设计。
5.1 数据链路层
数据链路层是UACN的中间层,其工作目标是使网络中的每个节点能够公平有效地共享有限的带宽资源,从而在提高网络吞吐量的同时,降低数据包传输时延、碰撞概率和节点的功耗等。水声通信网络中数据链路层主要研究方向是媒介接入控制(Media Access Control, MAC)协议[16]。MAC协议管理对通信介质的访问,如果不对传输介质进行适当的管理,当两个或多个数据包同时到达目标接收节点时,就会发生碰撞,数据包碰撞造成的冲突会降低整体网络性能。因此,MAC协议的基本目的是避免冲突,同时考虑网络吞吐量、能效、可扩展性和延迟等其他性能。
根据MAC协议设计的不同冲突避免策略,可以将MAC协议分为3类:固定分配类MAC协议、随机竞争类MAC协议,及混合MAC协议,图7给出了MAC协议分类及各分类中的典型协议。固定分配类MAC协议基本思路是对网络节点先进行信道资源分配,节点只能在自己被分配的信道资源内进行数据传输。随机竞争类MAC协议则是当节点有数据发送时,需要通过竞争获得信道资源使用权,如遇到自身传输的数据包与其他数据包发生碰撞,则需要按照一定规定重新传输数据包,直到数据包发送成功或者放弃发送。混合接入型MAC协议是对不同类型MAC协议的结合。
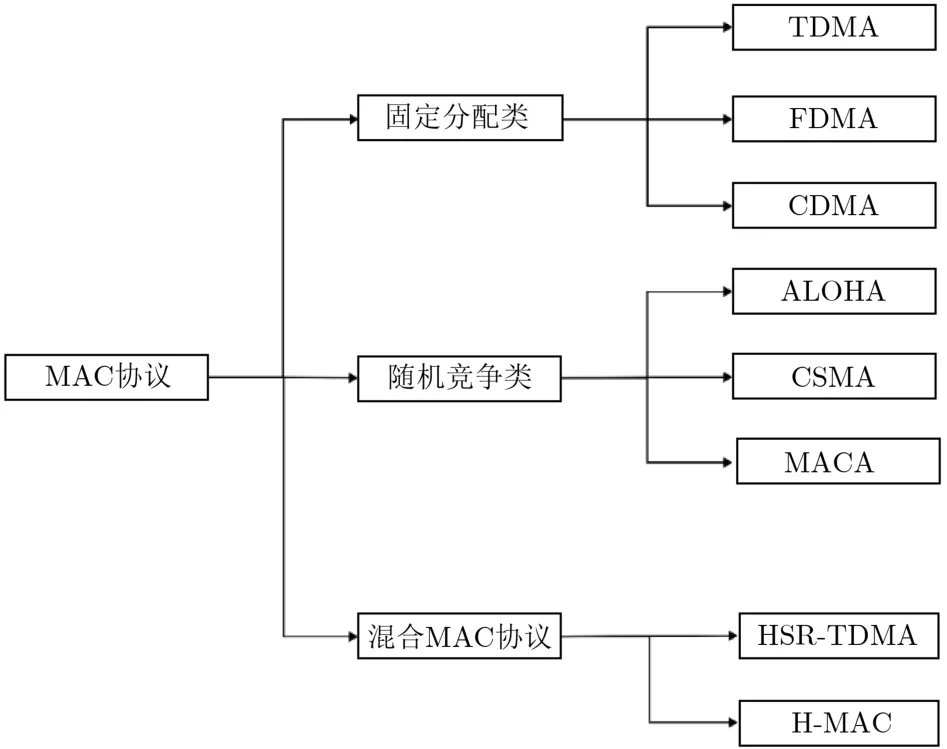
图7 MAC协议分类
5.1.1 固定分配类MAC协议
固定分配类MAC协议将不同的频带、时隙或码型等分配给网络节点,其3种基本类型为时分多址(Time Division Multiple Access, TDMA)、频分多址(Frequency Division Multiple Access,FDMA)、码分多址(CDMA)协议。
TDMA从时间的角度划分水声信道资源,将时间划分为若干时隙,网络节点在指定的时隙内发送或者接收数据,可避免来自相邻时隙的冲突。TDMA的保护时间与传播延迟成比例,水声信号传输时延的动态变化使TDMA的保护时隙要更长,从而导致吞吐量较低。TDMA协议可以进一步分为2个子类别:集中式和分布式,关于集中式和分布式的分类如图8所示。周锋等人[76]设计了一种能够将时隙进行动态分配的改进的分布式TDMA协议,并在仿真平台下对其吞吐量、丢包率和端到端时延3个性能指标进行了仿真,仿真结果表明该协议能够提高网络的工作效率。文献[74]以Super-TDMA协议框架为基础,提出了一种利用时延与调度信息的改进分布式算法。

图8 TDMA协议分类
FDMA将频带划分为若干个子带,并为不同通信节点提供不同子带。由于子带带宽可能小于传输信道的相干带宽,FDMA容易受到衰落的影响;并且,因为水声通信信道资源十分有限,FDMA类协议占用大量的信道资源,所以不能单独较好地应用于大规模水声通信网络。
CDMA基于扩频技术允许多节点在整个频带上进行传输,具有较大的传输带宽,并且能够同时区分在相同频带上传输的信号[77],可以有效地克服由水下多径造成的频率选择性衰落问题。文献[78]提出了M元能量检测器算法和了混沌正交组合序列极大优化了M元码分多址系统接收机结构和解码运算量。
5.1.2 随机竞争类MAC协议
随机竞争类MAC协议通过节点之间相互竞争获取信道资源使用权,进行介质访问,不需要资源的预分配。随机竞争类MAC协议根据竞争方式不同可分为2大类:随机接入协议和握手协议。随机接入协议的主要代表协议有ALOHA协议、载波侦听多路访问(Carrier Sense Multiple Access, CSMA)等。握手机制是网络节点间通过握手协调方法解决信道共享问题,典型的协议有:多路访问(Multiple Access with Collision Avoidance, MACA)、利用保护时间的冲突避免协议(Slotted Floor Acquisition Multiple Access, Slotted FAMA)等。
ALOHA协议是随机接入协议的典型代表,节点不必考虑信道是否被占用,只要有数据就进行发送。如果接收端同时收到多个节点发送的数据,则会发生冲突,需要重传。水下高时延和时延的动态变化,导致ALOHA不如在陆地上效率高[79]。文献[80]提出了冲突容忍的CT-ALOHA协议无需握手和同步,不受水声环境中传播延迟的影响,通过对发送数据包进行优化编码,使冲突数据包得以高效解析,从而提高网络吞吐量,减小丢包率。
CSMA是另一种代表性随机接入协议,当侦听到信道空闲时才发送数据,可以更好地利用信道资源[81]。实验结果表明,水下通信中较高的时延会加剧隐藏终端和暴露终端的问题。时延增加会使得CSMA需要更长的时间来检测冲突,因此在水下环境中,CSMA不是非常理想。文献[82]提出一种基于CSMA的传播延迟感知协议(Propagation Delay Aware Protocol, PDAP),该协议旨在最大限度地利用带宽,实现不同节点对之间的交错但可靠的通信。
MACA[83]是一种不使用载波侦听感知的握手协议,信道协商通过3次握手直接完成。虽然握手机制能够解决终端隐藏和暴露终端的问题,但是同时会使时延增加,带宽利用率降低。文献[84]在MACA-U协议的基础上提出了一种RS-MACA协议,该协议在负载较低时与MACA-U协议兼容;在负载较高时,邻近节点可采用“并行发送”的方式发送,显著提高了吞吐量性能。发射节点在信道预约等待时间内,同时接受符合条件的邻节点的发送预约,邻节点不需要消耗额外时间进行信道预约。完成预约的节点按照时隙进行数据发射,避免了数据包的碰撞。
5.1.3 混合MAC协议
混合MAC协议结合了固定分配类和随机竞争类等多类MAC协议进行信道资源分配,旨在更好地发挥不同类型MAC协议的优势。混合MAC协议为了满足通信性能要求,会一定程度上提高算法的复杂度,增加通信开销。
HSR-TDMA是一种经典的混合MAC协议,针对集群水下通信网络提出了一种分簇的多通道MAC协议,其中簇内通信采用TDMA技术,簇间通信采用CDMA技术。通信节点的分簇可以实现信道资源的空间复用,使网络的可用性显著提高,但是所有节点之间需要严格同步。为了兼顾固定分配和随机竞争MAC协议的优点,H-MAC协议,将单个时间帧划分为2个时隙,节点在一个时隙通过固定分配方案传输数据,为使协议适应流量变化,在另一个时隙通过竞争接入信道。H-MAC具有避免冲突和适应通信条件变化的能力,功耗较低,但也导致信道的浪费。UW-MAC协议,该协议结合CDMA和ALOHA的思想,可达到较高吞吐量与较低延迟和能量消耗。
5.2 网络层
网络层主要作用是解决数据包从发送端到达接收端的路径规划、流量控制和拥塞控制等问题,即路由问题,路由协议对于实现数据包经过中继节点顺利到达目的节点至关重要。根据数据包转发路径数量,路由协议可被分为单路径路由协议和多路径路由协议。单路径路由协议在传输数据包前选择一条能够通往目的节点的路径,但如果路径中间任一节点中断,该路径将失效,造成数据包转发失败。由于单路径路由协议在水下复杂环境适应度较差,故使用率较低。多路径路由协议到达目的节点的路径不止一条,更适配水下环境。根据数据包的传输路径是否固定,可将路由转发策略分为传统路由和机会路由。传统路由转发在开始数据传输前建立一个传输路径,然后沿该路径逐跳转发数据,然而水下通信网络拓扑结构通常是时变的,传统路由具有路由建立时间长、维护困难并且转发效率较低等问题[85]。机会路由是指在转发候补节点集合中选取节点进行数据传输,在信道中广播转发节点选取信息,所有成功接收到数据包的节点均有机会继续进行数据包转发,该特性能够提高水声通信网络的可靠性与转发效率。根据是否需要完成的定位信息,路由协议还可被分为基于定位信息的路由协议和不需完整定位信息的路由协议。在水下,目前尚不存在北斗、GPS这样的全球定位系统,通常,水声通信网络节点的位置信息并不容易获得,在不具备水下定位系统的场景下,不需完整定位信息的路由协议更适用。本节根据实际应用情况介绍一些经典的基于定位信息的路由协议与不需完整定位信息的路由协议。
5.2.1 基于定位信息的路由协议
在通过网络发送任何数据之前需要网络中所有节点的定位信息以及有关目的节点位置信息的路由协议称为基于定位位置的路由协议[86],因为需要大部分能量用于收集位置信息,这类协议通常能效较低。本节介绍几种经典的基于定位位置的路由协议用以说明本类路由协议的工作原理,分别是基于矢量的转发协议(Vector Based Forwarding, VBF),逐跳矢量转发协议(Hop-by-Hop VBF, HH-VBF),聚焦波束路由协议(Focused Beam Routing, FBR)、基于定向泛洪的路由协议(Directional Floodingbased Routing, DFR)。
VBF是一种基于定位的路由协议[87],它假设每个网络节点携带其自身、目的节点和所有转发节点的位置信息。利用源节点和目的节点的位置信息创建虚拟路由管道,如图9所示,该节点发送的数据包的每个头字段中包括源节点、转发节点和目的节点的位置信息以及路由管道的范围和半径。VBF协议的主要优点是通过允许特定转发节点参与虚拟路由管道附近的数据包转发来减少网络流量;主要缺点是,如果路由路径中存在空白区域,该协议无法找到将数据包发送到目的节点的路径,数据包将被丢弃[88]。文献[89]中提出的HH-VBF协议是VBF的扩展,其中每个转发节点都计算其朝向接收节点的矢量,以便使用多个虚拟管道将数据转发到目的节点。与VBF协议相比,HH-VBF可能会由于单跳计算量较大,增加端到端时延。
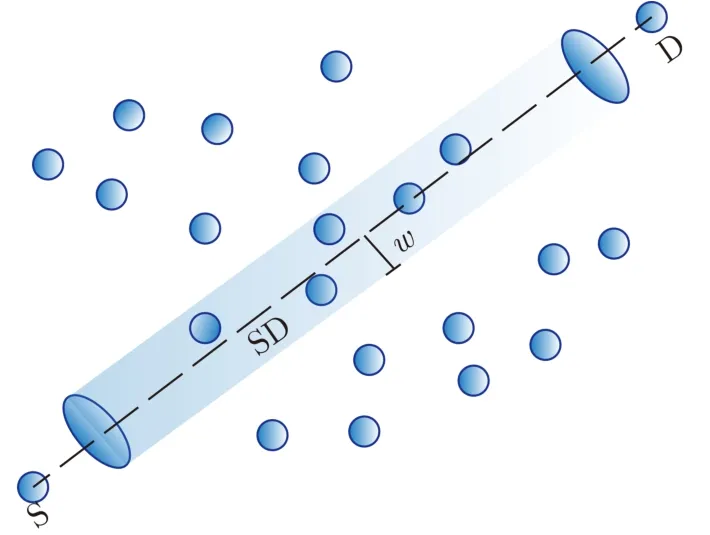
图9 VBF协议转发原理
聚焦波束路由(FBR)[90]是一种无需定位的路由协议,发送节点需要自身和目的节点的位置信息,协议中的数据传输使用多个功率传输级别,提高了路由鲁棒性。该协议的特点是以特定的角度锥体对请求发送(Ready-To-Send, RTS)数据包进行多播,如果发送节点未收到允许发送(Clear-To-Send,CTS)的消息,则会将发送功率级别增加,在达到最大功率水平且未找到邻居后,角度向左或向右移动以覆盖整个区域转发原理如图10所示。
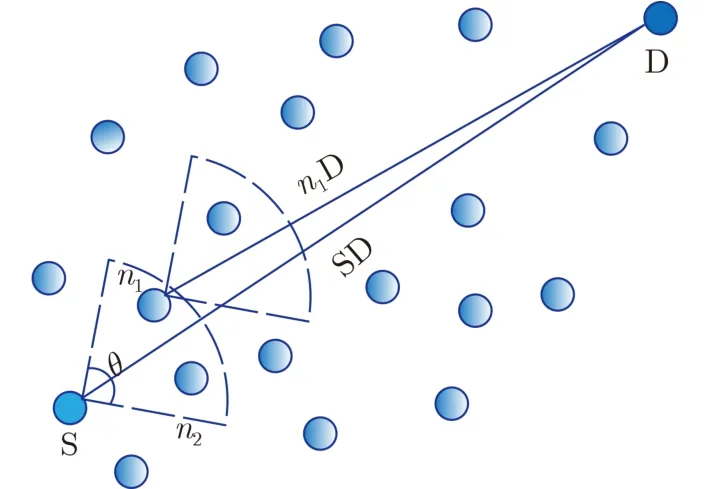
图10 FBR协议转发原理
DFR[91]是基于位置的路由协议,协议中数据包使用泛洪机制到达目的节点。在该协议中,假设每个节点都知道其自身、单跳节点和最终目的节点的位置,如图11所示,当一个节点有数据包要发送时,它会将数据包泛洪到接收节点。然而,为防止分组泛洪到整个网络中,潜在的转发节点必须处于泛洪区域内。泛洪区由FS和FD之间的角度决定,其中S是源节点,D是目的节点,F是接收节点,通常是汇节点。DFR协议的主要优点是,它通过允许最少1个节点参与数据包转发来解决无效问题,主要缺点是转发角度不易确定且能耗较高。
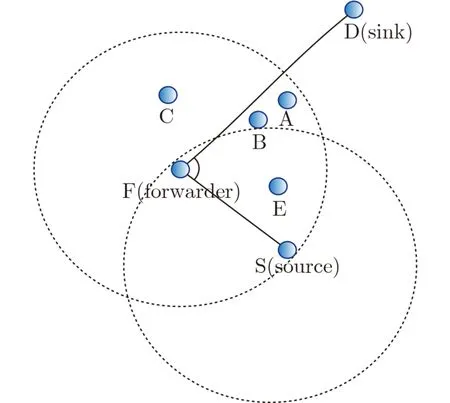
图11 DFR协议转发原理
5.2.2 不需完整定位信息的路由协议
与基于定位信息的路由协议不同,基于深度信息的路由协议中网络节点不需要其他网络节点的完整位置信息,只考虑节点的深度。本节介绍几种较为典型的基于深度信息的路由协议,分别是:基于深度路由协议(Depth Based Routing, DBR)、节能的深度路由协议(Energy Efficient Depth-Based Routing, EEDBR)以及定向深度路由协议(Directional Depth Based Routing, D-DBR)。
DBR协议在文献[92]中被提出,该协议不需要获得完整的位置信息,路由决策依赖于网络节点的深度值,深度较高的节点将数据包传输到深度较低的节点,以此完成从深到浅的数据包传输。该协议存在一些不足,首先,在稀疏网络中,它的性能不佳,可能会出现转发空洞区域的问题;其次,靠近接收节点或者说深度较浅的网络节点因过度转发数据包,导致能量消耗殆尽等原因失效。
为解决DBR协议中深度较浅节点能量消耗过多的问题,提出了EEDBR协议,该协议综合考虑剩余能量和深度来选择最佳转发节点,在相邻节点中深度值最小且剩余能量最大的节点成为下一跳目的节点。EEDBR的主要缺点是没有为多路径通信定义机制。
D-DBR协议是文献[93]中提出的一种基于无定位接收节点的路由协议,它也是DBR的扩展,其中数据包转发使用对角线距离的方法。该算法在数据转发机制中使用到达时间(Time of Arrival, ToA)测距技术,而在路由指令中使用带有角度保持时间的保持时间函数。该协议的主要缺点是数据包转发到空洞区域节点没有设置后退机制,当网络密度较低时数据包送达率不佳。
本节中提到的所有路由协议的特点与主要缺点归纳如下,如表2所示。
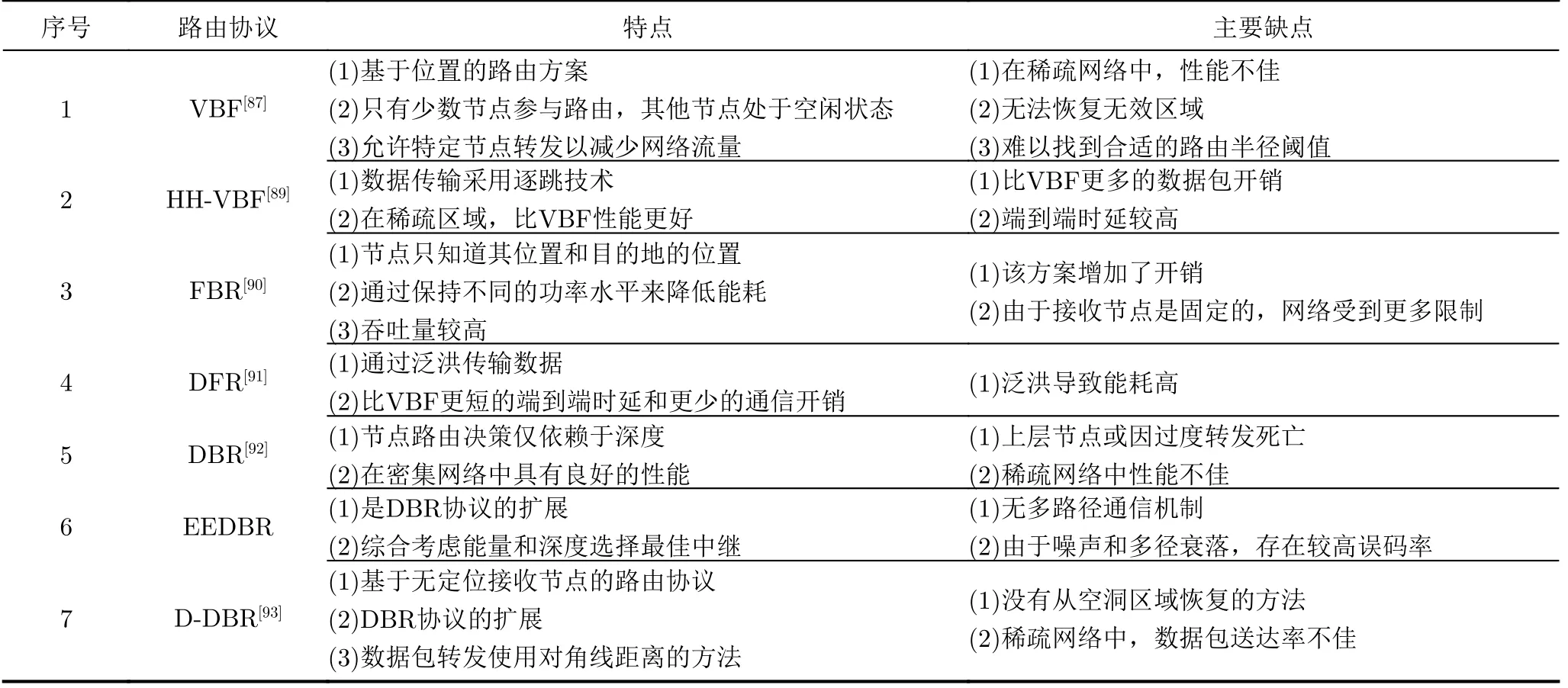
表2 路由协议的特点与主要缺点
5.3 跨层设计
传统网络协议栈采用层次化的架构,每一层拥有相对独立的功能,每层协议都聚焦解决某些特定的问题,并向更高层提供服务。这种层次化的网络协议架构方便了系统的实现、维护和扩展。然而,随着网络业务量的增长与网络运行环境复杂度提升,分层网络结构就需要处理更多甚至过量的工作。此时,传统分层协议设计的局限性就显露出来,因为无法直接调度其他层的信息参数,只能通过相邻两层之间的通信传递需要的信息,这会导致时延增加,从而降低系统效率,并使得协议栈无法充分利用有限的频谱资源和功率资源[94]。随着传统分层结构的弊端逐渐暴露,跨层设计的优点逐渐体现。
在水声通信网络中,跨层设计的重点是在物理层、数据链路层和网络层之间。物理层可为其他层提供发送功率、误比特率和调制编码方式等参数,数据链路层的共享参数有目前传输的数据帧长度、数据传输开始和结束的时间等。因此,通过利用这些物理层的信息参数,可实现自适应调整数据链路层的介质接入控制机制,能够改善整个网络系统在网络吞吐量和端到端时延方面的性能。在网络层与物理层之间进行跨层设计时,物理层提供的诸如信道时延、能量衰减、丢包率等信道状态信息,可以作为网络层路由选择的基础,进而对路径进行最优选择,达到节省功率、最小化传播时延、最大化吞吐量等目标[95]。通过跨层设计,能够使网络中不同层之间进行信息交换、联调优化,从而达到网络资源高效均衡的分配,提高网络整体的工作性能。
文献[96]中提出了一种水声通信网络的模块化跨层协议,该协议建立在水下路由协议和MAC协议[84]的基础上,并且优于按照经典分层方法单独开发的协议。该方案依赖于分布式优化问题来联合控制路由、MAC和物理功能,以便在水下环境中实现高效通信,同时结合了3D地理路由算法(路由功能)、用于接入带宽受限的高延迟共享声学介质(MAC功能)的基于混合分布式CDMA/ALOHA的方案,以及用于联合选择调制、FEC和发射功率(物理层功能)的优化解决方案。文献[97]研究了双通道水声通信系统的跨层结构,采用双通道结构,使得控制与数据的传输模式相互分离,并针对不同的传输特性与需求,实现信道的最优配置。在此基础上,提出了物理层与LLC层的联合设计,以及网络层与MAC层的联合设计。这种模式对层次的结构进行了重新规划,采用了降低系统层次、联合设计和跨层次交互的方法,对系统内存的使用进行再优化。
6 总结与展望
水声通信与组网一直是水下信息无线传输的研究热点。虽然受信道非理想特性影响,水声通信与组网技术需要克服诸多问题,经过几十年的发展,水声通信在可靠性和有效性方面已经获得长足进步,目前网络化发展也如火如荼。针对水声信道的特点,国内外学者提出了一系列水声通信网络技术和方案,致力于构建稳健、可靠、高效的水下通信网络。国内的水声通信及网络研究工作虽然开展较晚,目前正逐渐缩小与其他国家地区的差距,部分成果性能已达到国际领先水平。但需要认识到,水声通信及网络技术仍存在不少问题需要解决,不少难关需要攻克。
前文已经讲过,水声通信与组网从本质上来说是无线通信与组网的一种,而水声通信组网与有线通信组网或者其他无线通信组网,最大的差异之一,同时也是最大的难点之一,就是时空频变的水下复杂的声信道环境。深水浅水、水平垂直、固定移动等因素都会使信道对水声通信组网造成不同的影响。尽管现在看来还很难做到在任一条件都预测或计算出精准的信道,但如果能将信道归纳成一套由若干典型模型组成的标准信道库,可以大力推动水声通信及网络技术的发展。
评价通信系统通常采用有效性和可靠性作为质保,这两者相互联系且矛盾,人们希望在获得高有效性的同时也获得高可靠性,但现实中往往要在二者中做出平衡,这就体现了自适应的重要性。同样,水声通信及组网在面向应用时呈现出的一大特点是没有哪种物理层通信方式、网络拓扑或协议等能够满足所有应用场景,物理层水声通信实验通常采用前文写到的通信距离与通信速率乘积来衡量有效性,这个指标还有一个隐含条件,即误码率应在较低水平,这用来衡量的是可靠性。虽然通信距离与通信速率乘积在近二三十年已提升十余倍,水声通信网络规模与性能也有了大幅发展,但与能满足全部场景或多个场景的自适应水声通信组网尚存较大距离。这就需要我们在加深对应用需求和通信组网认知的基础上,开展基于人工智能等技术的自适应水声通信及网络技术研究。
此外,研制小型化、低功耗、通用性强的水声通信机;制定标准化的水声通信网络协议或协议栈;开发高保真的水声通信及网络仿真环境或软件;实现可用于UUV等水下移动平台的水声通信及组网;实现水声通信、探测、定位、导航一体化等工作,都是非常具有研究意义和应用价值的。
猜你喜欢
网络安全和信息化(2018年3期)2018-11-07
电子制作(2017年22期)2017-02-02
电子制作(2017年19期)2017-02-02
系统工程与电子技术(2016年7期)2016-08-21
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
声学技术(2014年1期)2014-06-21
电测与仪表(2014年16期)2014-04-22
现代防御技术(2014年6期)2014-02-28