相似网络构建与表征的水下声信号检测
2024-01-27 06:57张红伟王海燕闫永胜申晓红
电子与信息学报 2024年1期
张红伟 王海燕 闫永胜 申晓红
①(西北工业大学航海学院 西安 710077)
②(海洋声学信息感知工业和信息化部重点实验室(西北工业大学) 西安 710072)
③(陕西科技大学电子信息与人工智能学院 西安 710021)
1 引言
随着海洋探索的不断发展,声波作为一种能够远距离传播、抗衰减性较好的能量形式,已成为海洋目标探测的重要手段之一。在此背景下,被动声探测由于具有隐蔽性好、机动性强、耗资小等优点,在海洋监测、石油钻井平台、水中航行器等领域得到广泛应用,成为目标探测技术中不可或缺的一环[1]。虽然电子技术的发展和减振降噪技术的提高以及复杂多变的海洋环境影响,已使得水中目标噪声级无论是数量量级还是组成结构上都有了较大幅度的降低[2],但探测装置仍然需要在复杂海洋环境下实现对水中弱目标的检测。海洋环境噪声具有非常复杂的信号特征,同时在声信号传播过程中存在信道复杂多变、多径效应等问题,这些都给水中目标检测带来了巨大的挑战[3]。因此,研究人员正寻求更鲁棒、更灵敏、无需目标先验信息的检测算法,以实现在复杂海洋背景下的水中弱目标检测。
基于统计理论,研究人员提出了多种水中弱目标检测方法,包括频谱分析、相关检测算法、过零检测和时域平均法等[4]。其中,频谱分析法通常用于平稳随机过程的研究,而对于非平稳信号,需要采用分段分析或等方法[5]。但是,这些基于信号谱分析的方法需要先获得目标信号的谱信息,难以检测到被噪声淹没的目标信号。另一种基于互相关检测的方法是在时域对信号进行处理,通过量化信号与噪声相关性的强弱来检测目标信号,但是该方法需要先获得目标信号的波形等信息[6]。此外,大多数基于统计理论的检测方法都假设背景噪声是随机噪声,然而实际的海洋环境噪声是非线性、非平稳、非高斯的,这些方法难以满足上述假设。因此,研究人员需要寻求更加鲁棒、灵敏且不需要目标先验信息的检测算法,以应对复杂的海洋环境下的水中弱目标检测问题。
针对以统计理论为基础的检测算法存在的问题,一些学者开始研究非线性检测方法,如神经网络方法和随机共振方法。斯坦福大学的He等人[7]创建了ImageNet大型图像数据库,通过该数据库成立的视觉识别挑战赛,进一步推动了卷积神经网络(Convolutional Neural Network, CNN)的发展。随着研究的深入,CNN向目标检测、识别等领域进行了扩展,并建立了新的网络结构。例如,Girshick等人[8]提出了基于区域卷积神经网络的目标检测和分割方法。然而,这些以数据驱动为基础的方法需要大量目标信号来训练模型,这在水声信号处理领域难以满足需求。一些研究表明,随机共振系统在受到扰动的作用下,噪声能量会向信号能量转移,从而产生类似于力学中的共振输出,提高信号信噪比。为此,Shi等人[9]将随机共振系统应用于微弱信号增强检测领域,实现了低信噪比下机械信号的有效检测。然而,对于舰船辐射噪声等复杂信号的检测仍然存在困难。近年来,闫源江等人[10]的研究表明舰船辐射噪声表现出混沌特性。因此, Sun等人[11]基于Lyapunov指数、关联维数[12]等混沌特性分析方法,对目标信号的混沌特性进行量化,并根据待测信号中蕴含混沌特性的强弱,进行水中目标检测的研究。
作为一种多学科交叉的新型研究工具,复杂网络为信号处理提供了一个全新的视角,目前被广泛应用于物理学、生物学、社会学等众多领域的研究中[13,14]。其具有不依赖目标先验信息的优点,使得无目标先验下的水中弱目标检测成为可能。迄今为止,国内外众多学者已对网络重构与表征进行了长时间的研究[15]。Zhang等人[16]提出了一种将时间序列转化为复杂网络的方法--环切割法,分析了混沌信号和高斯白噪声重构网络拓扑特性的不同。在此基础上,Zou等人[17]基于 cycle 网络,研究了不同时间序列重构网络的统计特性,得到了不同时间序列重构网络的拓扑结构差异明显的结论。同时,Hu等人[18]基于可视条件提出了可视图的网络重构方法,通过直接连接时间序列的幅值,保留满足条件的连线作为复杂网络的连边而得到对应的复杂网络。并更进一步提出了水平可视图算法、加权水平可视图算法、有限穿越可视图算法和角度穿越可视图算法等方法[19],实现了时间序列的动力学特征到网络拓扑结构的映射。
尽管复杂网络理论已经在各个领域得到了广泛应用,但是目前已有的网络重构和表征研究均是基于理想数据,即没有噪声干扰的数据[20]。但在水声信号处理领域中,目标信号和环境噪声干扰是相互依存的,很难消除。为了解决在复杂海洋背景下水中弱目标检测难的问题,本文提出了相似网络的分析方法,并引入了图信号处理理论对重构网络表征进行研究。最终,进行了仿真分析和实录数据验证,结果表明,相比于窄带能量检测和冒泡熵等方法,相似网络具有更好的检测性能。
2 相似网络构建
相似网络的构建步骤如下:首先,通过滑动窗口将时间序列按时间轴分段处理,然后使用Takens定理对每个分段的子信号进行相空间重构。最后,将相空间中的子向量作为网络的节点,并使用节点之间的相似度作为度量边的存在与否,以此完成相似网络的构建。
2.1 相空间重构
相空间是用来表示系统所有可能状态的空间,相空间上的每个点都对应系统一个状态。一些简单的具有混沌特性的信号,可以通过相空间中是否具有奇怪吸引子来判定。根据Takens重构定理对接收数据x(t)进行相空间重构:将接收到的声信号,依据复自相关法及G-P算法[21]分别求取延迟时间τ与嵌入维数m,最后依据式(1)完成相空间重构
其中,x(ti)代表离散信号x(t)第i个数据,y(t)表示重构后的信号矩阵,N为信号x(t)的长度。
2.2 几何距离度量
在信息几何中,每一个概率分布函数视为统计流形上的一个点,信息论中的基本量与流形中的几何量建立对应关系,据此将信号间差异度量问题转换为矩阵流形几何结构差异的表征。首先通过提取待测信号恰当的特征信息,将信号转换为一个正定矩阵。最后在矩阵流形上,通过几何距离度量两信号矩阵间的相似度,完成信号相似度的度量。
常用的几何距离度量方法有测地线距离、对称库尔贝克-莱布勒散度(Symmetric Kullback-Leibler Divergence, SKLD)等,已在许多领域中均得到了广泛的应用。文献[22]中已经表明测地线距离、SKLD具有仿射不变性,即对于n×n的可逆矩阵M,距离度量函数满足δ2(A,B)=δ2(MAMH,MBMH)。对于矩阵流形p(n)上的两点Z1和Z2,两点间的SKLD为
其中,trace(·)为求取矩阵迹的函数。
2.3 相似网络的构建
为实现目标信号到复杂网络的映射,本文在相空间重构基础上,将每个维度的向量yi(t)(yi(t)=[x(ti)x(t1+i)...x(tN-(m-i)τ)])作为网络节点,节点间相似度作为连边存在与否的度量值。本文选取SKLD来度量节点间的相似度,当相似度大于设定的阈值时,认为节点间存在连边,反之则不然。以此完成相似网络的构建,具体流程如下:
(1) 相空间重构:利用滑动窗将时间序列沿着时间轴进行分段处理,并按式(1)对分段后的子信号进行相空间重构,得到重构矩阵y(t);
(2) 节点向量的相空间重构:将每个维度的向量yi(t)(yi(t)=[x(ti)x(t1+i)...x(tN-(m-i)τ)])作为网络节点,对节点向量yi(t)进行相空间重构,得到重构矩阵zi(t);
其中,N′=N-(m-i)τ为节点向量的长度。
(3) 正定矩阵获取:求取重构矩阵zi(t)的协方差矩阵,将其转换为正定矩阵R。具体如式(4)所示:
(4) 节点相似性度量:通过式(5)求取协方差矩阵Ri与Rj的SKLD(也可以为其他的几何距离度量方法),度量节点i与j的相似度:
其中,i,j=1, 2,...,m,m为嵌入维数。
(5) 动态阈值Td的选取:通过式(7)获取相似网络构建时的动态阈值Td;
其中,max(D)为相似度矩阵最大值,min(D)为相似度矩阵的最小值,λ为调节因子(λ·max(D)>1)。
(6) 网络重构:节点间SKLD数值大于阈值时,认为节点间存在连接边,反之则认为连接边不存在,以此获取相似网络的邻接矩阵W。
高斯白噪声是常用的噪声统计模型,且有研究表明,舰船辐射噪声同时具有连续谱与线谱,其表现出一定的混沌特性。文献[23]中已表明Chen混沌信号的时域及频谱图如图1(a)与图1(b)所示,其在21.6 Hz附近有强的线谱,且具有低频连续谱,可以较好地模拟舰船辐射噪声。下面我们将使用高斯白噪声作为环境噪声,Chen混沌信号作为舰船辐射噪声,对相似网络的检测性能进行仿真分析。

图1 Chen混沌信号
如图2所示,本文研究了不同信噪比信号的相似网络拓扑图,其中理想信号的相似网络近似一个全联通网络,即所有节点之间都相互连接。当信噪比降低时,节点之间的连接逐渐减少,拓扑结构趋向于高斯白噪声的重构网络,此时网络呈现小世界网络的特点,即大部分节点之间没有直接的连接,但每个节点的邻居之间可能存在直接的连接,因此可通过相似网络的拓扑特征来区分噪声和目标信号。

图2 不同信噪比信号重构网络拓扑图
3 相似网络谱分析
文献[24]研究表明,谱图理论可以从含噪图信号中提取出信号的固有特征。本文将在相似网络构建的基础上,借助谱图理论来提取重构网络内部隐藏的拓扑特性,以实现复杂海洋背景下的水中弱目标检测。
3.1 网络拉普拉斯矩阵
给定加权无向网络G={V,E,W},其中V为网络节点的集合,共有N (N=m2,m为嵌入维数)个网络节点,E为网络边的集合,W为网络的加权邻接矩阵,表示节点间连接关系,若节点i和节点j有边相连,则邻接矩阵矩阵W中的元素Wi,j=Wj,i ̸=0,反之,Wi,j=Wj,i=0。
首先对相似网络邻接矩阵W进行如式(9)的处理,将邻接矩阵W转换为实对称矩阵W′:
图信号频域分析的基础是图的拉普拉斯矩阵,其定义如式(10):
其中,deg(i)为节点i的度,ei,j为节点i与节点j间的边,E为网络边的集合,L为得到的拉普拉斯矩阵,D为网络的度矩阵,主对角线上第i个元素表示对应节点的度,为转换后邻接矩阵W′的元素。
3.2 网络谱分析
拉普拉斯矩阵是一个实对称半正定阵,矩阵元素与图节点的信号值无关,而只与节点连接关系有关。拉普拉斯矩阵有一组正交的特征向量V={vi,i=1,2,...,m},对应的特征值均非负。
不同信噪比信号的重构网络谱特性如图3所示,特征向量对应的特征值均非负。待测信号为不含噪的理想信号时,网络具有较大的特征值,且特征值的大小几乎没有变化。随着信噪比的降低,网络特征值大小下降。基于此,本文选取网络特征值的最大值进行相似网络检测性能的分析。

图3 不同信噪比信号重构网络谱特性分析
4 仿真分析
为进一步验证本文所提方法检测性能的优越性,将相似网络检测性能与窄带能量检测[25]、冒泡熵[26]及转移网络[27]的检测性能进行比较。基于相似网络构建与表征的目标信号检测算法流程如下:
(1) 相似网络构建:利用滑动窗将时间序列沿着时间轴进行分段处理,并依据2.3节中相似网络构建流程对分段后的子信号进行网络重构,获取相似网络的邻接矩阵W;
(2) 网络谱最大值选取:依据3.2节相似网络谱特性的分析,选取网络谱最大值来表征相似网络;
(3) 阈值选取:选取方差为1均值为0的高斯白噪声,窗长设置为8 000个数据点,使用蒙特卡罗模拟方法进行1 000次实验,得到1 000次实验中获得的网络谱最大值λi(i=1, 2,..., 1000),并依据奈曼-皮尔逊准则选取目标信号的检测阈值λT d;
(4) 检测性能分析:利用高斯白噪声与Chen混沌信号构造不同信噪比下的目标信号,使用蒙特卡罗模拟方法进行1 000次实验,获取不同信噪比下信号相似网络的最大谱值(i=1, 2,..., 1000,snr=0 dB,-1 dB,...,-20 dB),并依据式(12)对目标有无做出判决;
其中,H0代表接收的信号中没有目标,H1代表接收的信号中有目标。
选取方差为1,均值为0的高斯白噪声,对每个窗口长度为8 000个数据点进行处理,使用蒙特卡罗模拟方法进行了1 000次实验。通过计算,得到了最大谱值的序列及其概率分布统计图,分别如图4所示。从图中可以看出,高斯白噪声重构网络的最大谱值与高斯分布的重合度较高,体现出显著的高斯性。

图4 高斯白噪声重构网络最大谱值及其概率分布统计
在置信度为95%条件下,基于卡方检验进行了最大谱值分布特性的假设检验。最大谱熵值如图4(a)所示,其平均值与标准差分别为111.605 9, 55.122 5,求得检验统计量P=0.2542>0.05,说明最大谱值服从高斯分布的假设成立。
通过调节高斯白噪声和Chen混沌信号的幅度构建不同信噪比的目标信号,每个信噪比下进行1 000次蒙特卡罗模拟实验。信噪比从0 dB逐渐降至-20 dB,以中心频率约为21.6 Hz,带宽为10 Hz的窄带为例,对窄带能量检测的性能进行分析。在分析冒泡熵的检测性能时,将维数m设定为20,处理窗长为8 000。在构建转移网络时,处理窗长为8 000,符号长度设定为7。仿真结果如图5所示。
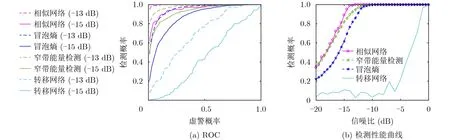
图5 检测性能对比分析图
图5(a)展示了不同信噪比条件下4种检测器的ROC检测曲线。从图中可以看出,在同一信噪比条件下,相似网络相比于窄带能量检测、冒泡熵以及转移网络,具有更好的检测性能。图5(b)则展示了同一虚警概率条件下4种检测器的检测概率-信噪比曲线。基于奈曼-皮尔逊准则,在虚警概率为10%,信噪比为-15 dB时,相似网络的检测概率仍然为89%,但窄带能量检测和冒泡熵的检测概率分别为81%和61%,而转移网络仅对信噪比大于0 dB的混沌信号有很好的检测性能。综上所述,相比于窄带能量检测和冒泡熵,相似网络具有更优异的检测性能,且无需获取目标信号的先验信息。
5 试验验证
5.1 试验说明
使用2018年5月16日20时30分至5月17日2时在南海海域采集的数据对所提方法进行性能分析。水听器布放点的经纬度为19°24.304 00′N /115°10.307 00′E,水听器距离海面1 785 m,水温为2.2℃,采样率为2 kHz,试验时船速为8~8.5 kn。试验船走航测线如图6所示,试验船从A点开始,到B点、C点折返,3次正横通过潜标附近,到D点结束,然后向更远的E点机动,整个测线航行约4小时。其中,A点、B点、C点以及D点与潜标的相对距离大约为10 km,E点距离潜标约56 km,到达后停止航行,漂泊等待。

图6 试验船走航路线图
如表1所示,本文选取20点30分至22点10分试验船从C点到E点(1.7~20 km)的数据作为待测信号, 第二天0时50分至2时试验船在终点处停泊录制的数据作为环境噪声,验证所提方法的检测性能。

表1 试验数据记录表
5.2 检测性能分析
根据图7所示的时频图,可以看出该试验船在264.5 Hz左右存在一个较为稳定的线谱。因此,可以利用该频率附近的窄带信号,分析窄带能量检测方法的检测性能。在分析冒泡熵的检测性能时,选择维数m为5,并使用与仿真设定相同的转移网络参数。图8展示了试验数据的重构网络中最大谱的数值图,结果表明最大谱的数值大小与实际信号的信号强度呈正相关关系。

图7 时频图

图8 相似网络最大谱数值图
根据奈曼-皮尔逊准则,我们在虚警概率为10%的条件下计算出了不同方法的检测门限。然后根据这些检测阈值对目标信号进行判决,并统计了一段时间内的检测结果,得到了检测概率。最终绘制了不同方法检测概率与距离的变化曲线。如图9所示,当试验船与水听器相距16.69 km时,相似网络方法仍然具有80%的检测概率。仿真与试验结果均表明,与冒泡熵、转移网络等方法相比,在相同条件下,相似网络方法具有更高的检测概率,能够有效检测到复杂海洋环境噪声下的舰船辐射噪声等目标声信号。

图9 试验数据检测结果
6 结论
针对水中弱目标检测缺乏目标先验信息的困难,本文结合复杂网络和信息几何研究,提出了一种相似网络构建方法。同时,利用图信号处理理论分析了重构网络的谱特性,并基于最大谱值进行了水中弱目标检测研究。通过仿真和海试实测数据验证本文所提方法的检测性能,结果表明,相对于窄带能量检测、冒泡熵和转移网络等方法,本文提出的方法在低信噪比条件下能够检测到更弱的目标信号,且无需目标先验信息,具有优越性。
猜你喜欢
摄影世界(2022年1期)2022-01-21
数学年刊A辑(中文版)(2020年3期)2020-10-27
北京航空航天大学学报(2019年9期)2019-10-26
知识经济·中国直销(2018年12期)2018-12-29
电子测试(2018年11期)2018-06-26
雷达学报(2017年3期)2018-01-19
中学生数理化·八年级物理人教版(2017年9期)2017-12-20
商周刊(2017年6期)2017-08-22
山东大学法律评论(2016年0期)2016-08-16
西南石油大学学报(自然科学版)(2015年5期)2015-04-16