单脉冲测角的二维分级主旁瓣干扰联合抑制方法
2024-01-27 06:56张仁李盛卫星
电子与信息学报 2024年1期
张仁李 朱 蕾 邱 爽 盛卫星
(南京理工大学电子工程与光电技术学院 南京 210094)
1 引言
在阵列信号处理中,自适应单脉冲技术通过调整天线单元或者子阵的权矢量,在干扰方向形成零陷来抑制干扰信号[1,2]。当存在主瓣干扰(MainLobe Jamming, MLJ)时,传统自适应单脉冲波束形成算法抑制主瓣干扰将引起波束指向偏移、增益下降等问题,降低了测角的准确性与可靠性[3,4]。因此,设计能够同时抑制主、旁瓣干扰,并保持单脉冲比曲线不失真的自适应单脉冲测角算法是亟需解决的难点问题。
目前抑制主瓣干扰的自适应单脉冲算法主要分为7类,包括四通道法、阻塞矩阵预处理法(Block Matrix Preprocessing, BMP)、特征投影矩阵预处理(Eigen-projection Matrix Preprocessing, EMP)法、辅助阵列法、主瓣线性约束法、极化抗干扰法和分维抗干扰法等。文献[5]在和差三通道基础上增加双差通道构成四通道单脉冲雷达系统,利用增加的自由度抑制主瓣干扰,但存在旁瓣干扰处零陷不深的问题。BMP方法[6]对主瓣干扰来向进行估计,以此构造阻塞矩阵抑制主瓣干扰;EMP方法[7]通过向主瓣干扰子空间的正交补子空间投影来抑制主瓣干扰。文献[8]通过重构协方差矩阵(Covariance Matrix Reconstruction, CMR)抑制旁瓣干扰,避免了协方差矩阵奇异的问题。但是EMP类方法在主、旁瓣干扰功率相近的情况下,难以准确获得各干扰的特征向量,导致干扰抑制性能下降。
文献[9]针对地基远距离探测雷达,采用大型辅助阵列结合最小均方误差准则来完成主瓣干扰抑制,由于辅助阵列的阵元间距不均匀且排布具有稀疏性,形成的抗干扰后方向图存在高栅瓣。针对1维线阵,文献[10]通过对差波束方向图施加多点线性约束来保持单脉冲鉴角曲线不失真。文献[11]将多点线性约束方法从1维线阵推广到了2维面阵,在方位维与俯仰维施加多点联合线性约束,使得单脉冲鉴角曲线在2维平面接近于静态权。文献[12]对和、差波束自适应权重进行联合优化,通过约束天线增益和鉴角曲线来避免波束形状失真。文献[13]利用天线极化特性对回波信号进行正交极化分解与极化估计,以此抑制主瓣干扰。文献[14]针对矩形面阵提出了一种分维自适应波束形成(Enhanced Adaptive Digital BeamForming, EADBF)算法,该算法在行、列维抑制干扰的同时在列、行维形成静态单脉冲和差方向图,从而保持良好的单脉冲测角性能。当干扰与目标信号方向在1维较为接近时,EADBF算法测角性能将出现恶化。
针对矩形平面阵列天线存在主、旁瓣干扰的单脉冲测角问题,本文设计了2维分级联合自适应波束形成算法(Two-Dimensional Hierarchical Joint ADBF, TDHJ-ADBF),TDHJ-ADBF算法将矩形面阵分解为方位维和俯仰维两个正交维度,将两个维度等效为线阵进行2维分级处理,第1级在测角维进行:采用低运算量的压缩多重信号分类法[15](Compressed MUltiple SIgnal Classification, CMUSIC)对主瓣干扰进行快速识别与方向估计,进而构造阻塞矩阵滤除主瓣干扰,获得仅包含旁瓣干扰和噪声的协方差矩阵,对和、差波束方向图进行指向和鉴角曲线联合约束,完成测角维自适应和、差波束权重计算与波束形成处理;第2级在非测角维进行:将第1级波束形成后残留的测角维主瓣干扰在非测角维进行抑制。由于测角维的旁瓣与主瓣干扰分别在第1级和第2级抑制,TDHJ-ADBF方法能够实现测角维单脉冲鉴角曲线不失真,并完成对主、旁瓣干扰的联合抑制。TDHJ-ADBF避免了当多个干扰功率接近时EMP类算法无法准确估计干扰特征向量和干扰抑制性能恶化的问题,同时也避免了当干扰与目标信号在方位/俯仰维取值接近时EADBF算法信噪比降低与测角精度下降的问题。
2 信号模型
在图1中,由M行N列共MN个阵元组成的均匀矩形平面阵列分布在xOy平面内,阵元间距为d。方向矢量(θ,φ)通过该矢量与z轴的夹角θ,和该矢量在xOy平面的投影与x轴正半轴的夹角φ定义。方向矢量(θ,φ)在x轴和y轴的投影分别为u=sinθcosφ和v=sinθsinφ。
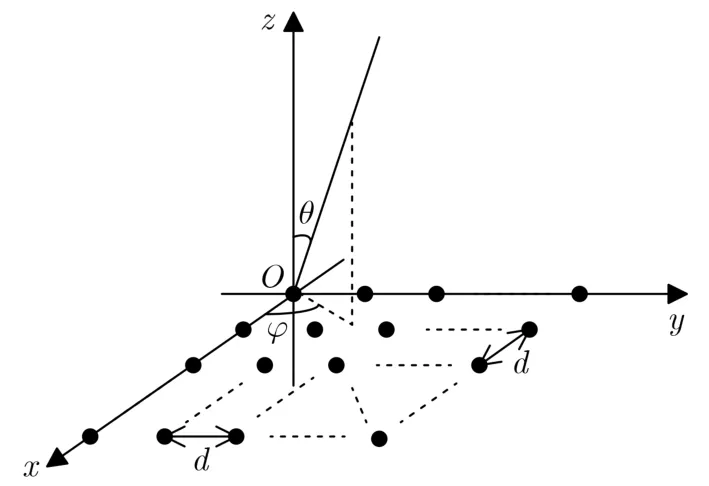
图1 均匀矩形平面阵模型
全阵导向向量可表示为
其中, (xm,n,ym,n)表示第m行、第n列阵元坐标,上标T表示转置操作。因此,阵列接收信号r(t)为
其中,s0(t)是目标信号,a(us,vs)是其导向向量,si(t)是干扰信号,a(ui,vi)是其导向向量,n(t)是加性高斯白噪声,J为干扰数量。记第m行和第n列天线单元接收信号分别为rRm和rCn,则
u维和v维等效线阵的导向向量au(u)和av(v)分别为
因此,全阵的导向向量可以分解为两个1维导向向量的Kronecker积
同理,全阵权重也可以表示为两个1维权重的Kronecker积
其中,wu和wv分别是u,v维等效线阵的权重。当波束指向为(u0,v0)时,天线方向图在u,v维的主瓣区域分别为[u0-BWu/2, u0+BWu/2]和[v0-BWv/2,v0+BWv/2],其中BWu=2λ/(Nd)和BWv=2λ/(Md)分别为u,v维第1零点波束宽度。
3 2维分级联合自适应单脉冲测角算法
3.1 算法流程
本文设计的TDHJ-ADBF算法处理流程图如图2所示,将天线阵列分为方位维(u维)与俯仰维(v维),方位维与俯仰维的全阵和、差波束形成分别通过2级处理来产生。第1级波束形成处理过程如下:为了保证测角维单脉冲比不发生畸变,第1级仅抑制测角维旁瓣干扰,TDHJ-ADBF方法采用压缩多重信号分类法(Compressed MUltiple SIgnal Classification, C-MUSIC)快速识别并测量测角维主瓣干扰方向,然后利用主瓣干扰方向构造阻塞矩阵滤除主瓣干扰,得到仅包含旁瓣干扰和噪声的协方差矩阵,为了保持鉴角曲线斜率不畸变,对和、差波束方向图进行指向和鉴角曲线联合约束,完成测角维旁瓣干扰抑制,获得第1级波束形成输出。第2级在非测角维进行,对残留主瓣干扰进行抑制处理。接下来通过俯仰维即v维测角的2级处理来阐述TDHJADBF算法工作过程。

图2 TDHJ-ADBF算法流程图
3.2 v维分级自适应单脉冲处理
第1级:测角维主瓣干扰识别与旁瓣干扰抑制
(1)测角维v维主瓣干扰快速识别与方向估计。为了降低计算量并保持良好性能,本文使用C-MUSIC方法对主瓣干扰进行快速识别与方向估计。CMUSIC方法将v维空间Φv=[-1,1]均匀划分为lv个子区域Θk, k=1,2,···, lv,每个子区域长度为εv=2/lv,划分方式如图3所示。对于∀vs ∈Θs, s=1,2,···, lv,存在vk∈Θk, k=1,2,···, lv且k≠s,满足

图3 v维搜索区域划分
取av,i(v)为av(v)第i个元素,有
av(vs)可表示为
其中,K为采样快拍数。假设协方差计算快拍数据中仅包含干扰与噪声,对协方差矩阵进行特征分解得
其中,(·)*表示共轭运算。构造一个类噪声子空间集(Noise-Like Subspace Cluster, NLSC)为
将NLSC的交集空间记为
通过将全域划分为lv个子区域并构造NLSC的降维交集空间,在主瓣范围γv=[v0-BWv/2,v0+BWv/2]内利用式(25)搜索干扰峰值,至多能够得到J个峰值位置。利用只有真实干扰角度的导向向量与原始噪声子空间正交,通过式(26)判别出主瓣干扰真实峰值,将真实主瓣干扰方向记为vMLJ=,Pv为v维主瓣干扰数量
(2)构造阻塞矩阵预处理。为了使测角维主瓣区域方向图不发生畸变,需要在测角维进行主瓣保形。本文利用C-MUSIC得到主瓣干扰位置后,构造阻塞矩阵将主瓣干扰滤除,利用滤除主瓣干扰后信号构造协方差矩阵。
利用得到的Pv个主瓣干扰方向,构造阻塞矩阵
其中
对第n列阵元接收信号进行预处理得到
使用预处理后结果xCn计算协方差矩阵为
其中,σ2为加载因子,I为单位阵。实际应用中σ2一般比噪声平均功率高出5-10 dB。
(3)第1级自适应权重计算。为了保持主瓣形状不产生畸变,并在主瓣区域内单脉冲鉴角曲线线性,对和、差波束施加指向约束,在主瓣范围内选取qv=5个约束点,即v0, v0±Δv1, v0±Δv2,对鉴角曲线线性度进行约束,将联合线性约束问题描述为
其中,kv为v维单脉冲比斜率。利用拉格朗日乘子法求解式(32)得到的解析解,得到v维权重后,将每列数据进行第1级波束形成处理,得到测角维每列和、差波束输出结果为
第2级:非测角维残余干扰抑制
通过第1级处理得到了抑制v维旁瓣干扰的波束数据,接下来在非测角维u维对残留干扰进行抑制,第2级直接利用协方差矩阵求逆法计算自适应权重。使用式(34)每列和波束输出结果计算u维协方差矩阵
从而得到u维自适应权重为
获得u维自适应权重系数后,计算v维测角时全阵形成的和、差波束数据
因此,经过两级波束形成后,v维测角单脉冲比为
通过式(38)完成v维单脉冲测角处理。TDHJADBF算法在u维测角时2级波束形成处理流程与v维一致,此处不再赘述。
3.3 计算量分析
TDHJ-ADBF算法计算量主要包括在2维主瓣干扰识别与自适应权重约束问题求解两个部分。主瓣干扰识别运算包括协方差矩阵特征分解、矩阵奇异值分解以及空间谱计算。在v维搜索主瓣干扰时,协方差矩阵特征分解和矩阵Q奇异值分解的计算量均为O(M3),空间谱估计计算复杂度为O((M+1)(M-lvJ)γv/βv)。因此在v维搜索主瓣干扰总计算量为O(2M3+(M+1)(M-lvJ) γv/βv)。同理,在u维搜索主瓣干扰总计算量为O(2N3+(N+1)(N-luJ)·γu/βu),其中γu和βu分别为u维主瓣范围和空间谱搜索步进。
求解自适应权重约束问题解析解的计算量包括求解拉格朗日乘子以及权重。在v维求解约束拉格朗日乘子和自适应权重所需的计算量为O((M-Pv)3+同理在u维求解约束方程所需的计算量其中Pu和qu分别为u维主瓣干扰数和联合线性约束中u维的约束点数。
4 仿真分析
4.1 仿真条件
本节将比较EMP-CMR[8],EADBF[14]以及TDHJADBF算法在同时存在主、旁瓣干扰环境下的干扰抑制与单脉冲测角性能。仿真参数见表1,其中干噪比和信噪比均为阵元级取值,在波束指向方向存在1个主瓣干扰J1和2个旁瓣干扰J2, J3。由于u,v维阵元数量均为16,干扰数量为3,根据式(24),将u维和v维搜索空间划分为5个子区域,每个子区域宽度为0.4。

表1 仿真参数设置
4.2 u,v维主瓣干扰识别与估计
C-MUSIC和MUSIC算法在u, v两维空域对干扰信号搜索结果分别如图4(a)和图4(b)所示。在图4(a)中,MUSIC算法在u维全域搜索到3个峰值,峰值对应位置即为3个干扰位置。C-MUSIC算法在一个子区域内有3个峰值,全域一共有15个峰值,在u维主瓣区域u=[-0.125, 0.125]范围内搜索得到3个峰值位置,分别为u=-0.086, 0和0.023。在图4(b)中,C-MUSIC算法在v维主瓣区域v=[-0.125,0.1 2 5]进行搜索得到3 个峰值,方向分别为v=-0.058, 0和0.086。
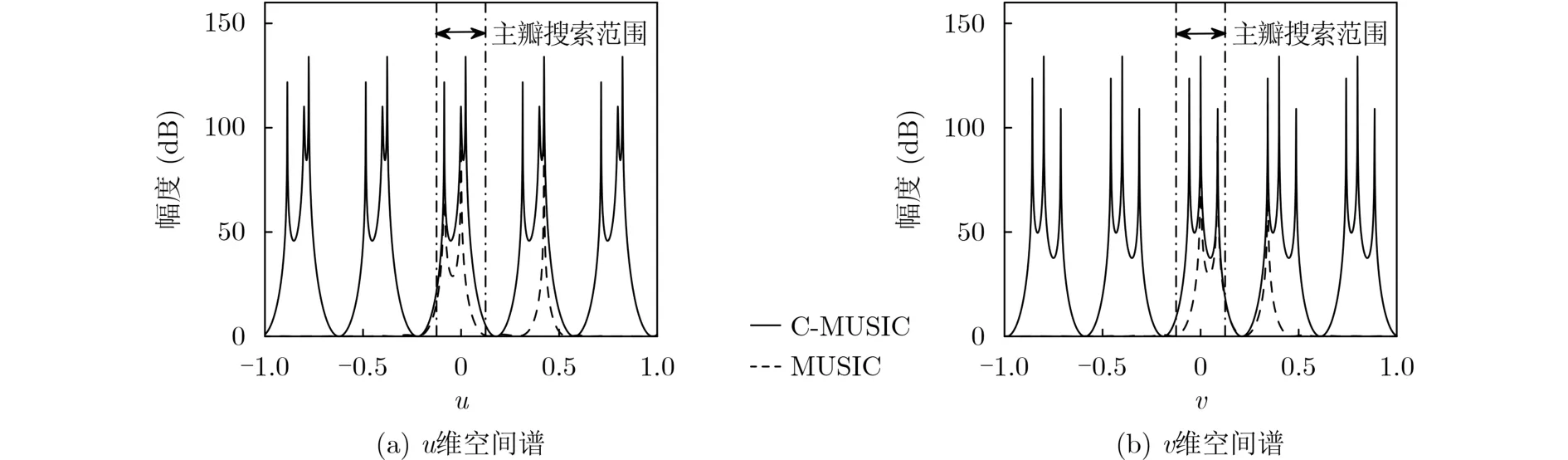
图4 C-MUSIC与MUSIC在u维与v维空间谱
C-MUSIC算法将主瓣区域搜索得到的峰值使用式(26)计算其与原始噪声子空间的正交性,用来确定是否为真实主瓣干扰,u,v两维判别结果如表2所示,u维:u=-0.086和0为主瓣干扰方向,而u=0.023为旁瓣干扰形成的伪峰,v维:v=0和0.086为主瓣干扰方向,而v=-0.058为来自旁瓣干扰形成的伪峰。

表2 C-MUSIC算法u维和v维正交性检验结果
4.3 v维自适应抗干扰性能分析
(1)第1级v维主瓣保形干扰抑制方向图。通过4.2节处理可得,干扰J1和J3为v维主瓣干扰,J2位于v维旁瓣。v维测角时TDHJ-ADBF在第一级对旁瓣干扰J2进行抑制处理,同时进行主瓣保形。TDHJ-ADBF, EMP-CMR, EADBF以及静态权在v维形成的和、差方向图如图5(a)和图5(b)所示,TDHJ-ADBF的和、差波束方向图在v=0.342处产生较深的零陷,零陷深度分别为-66.60 dB和-63.33 dB,实现了对干扰J2的抑制,并且和、差方向图在主瓣范围内与静态方向图形状保持一致。EADBF算法在测角维不抑制干扰,其方向图与静态权相同。由于3个干扰功率接近,EMP-CMR算法无法准确获得主瓣干扰特征向量,导致构造的特征投影矩阵不准确,未能在干扰方向v=0.342处产生零陷。

图5 v维测角时第1级波束形成(v维)方向图
(2)第2级u维残余干扰抑制方向图。TDHJADBF在第2级抑制干扰J1和J3。TDHJ-ADBF,EMP-CMR, EADBF及静态权在u维的和波束方向图如图6所示。由于TDHJ-ADBF算法在第1级完成了测角维旁瓣干扰J2的抑制,因此第2级在u=-0.086和0.422处抑制干扰J1和J3,和波束零陷深度分别为-52.60 dB和-55.41 dB。EADBF算法在测角维不抑制干扰,因此在非测角维u=-0.086, 0和0.422处产生零陷来抑制3个干扰,波束形状已经明显畸变。EMP-CMR针对主瓣干扰构造的特征投影矩阵不准确,未能在干扰方向u=0.422处产生较深零陷。

图6 v维测角时第2级波束形成(u维)方向图
4.4 u维自适应抗干扰性能分析
(1)第1级u维主瓣保形干扰抑制方向图。根据表2结果,分维后干扰J1和J2在u维主瓣区域,干扰J3位于u维旁瓣,因此u维测角时第1级处理抑制旁瓣干扰J3,同时进行主瓣保形。TDHJ-ADBF, EMPCMR, EADBF以及静态权在u维形成的和、差波束方向图如图7(a)和图7(b)所示,TDHJ-ADBF算法和、差波束方向图在u=0.422处均产生了较深的零陷来抑制干扰J3,零陷深度分别为-55.22 dB和-67.74 dB,并且和、差波束方向图在主瓣范围内与静态方向图形状保持一致。EADBF算法在测角维不抑制干扰,其方向图与静态权相同。由于3个干扰功率接近,EMP-CMR的特征投影矩阵构造不准确,无法在干扰处产生零陷。
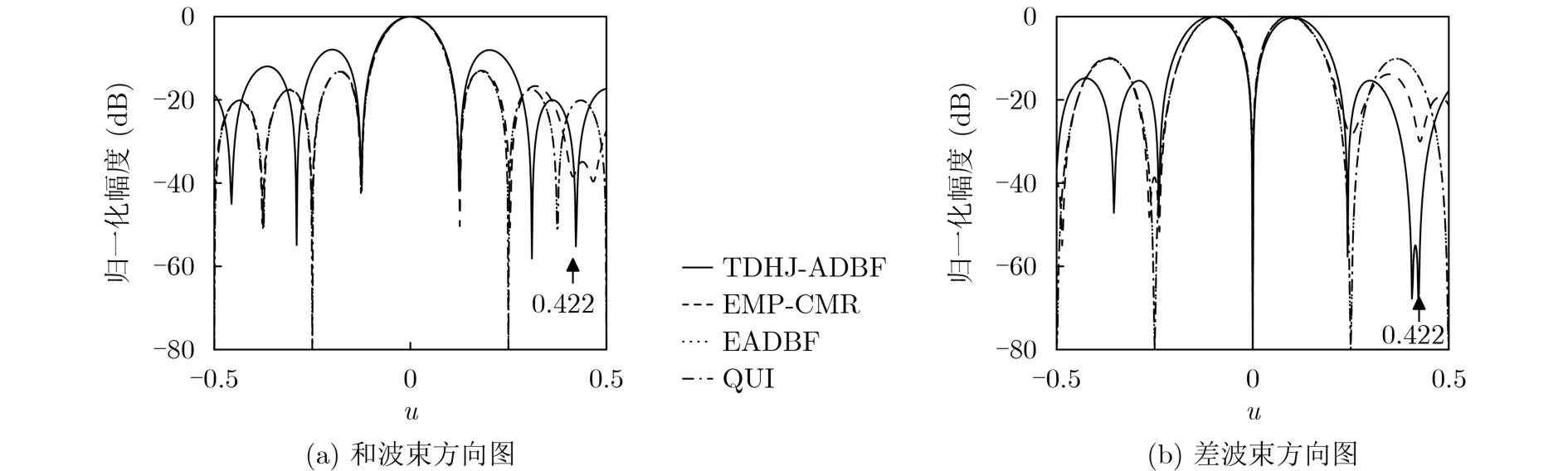
图7 u维测角时第1级波束形成(u维)方向图
(2)第2级v维残余干扰抑制方向图。TDHJADBF在第2级完成对干扰J1和J2的抑制。TDHJADBF, EMP-CMR, EADBF及静态权在v维和波束方向图如图8所示。TDHJ-ADBF算法第2级处理在v=0.086和0.342完成干扰抑制,和波束零陷深度分别为-51.55 dB和-80 dB。EADBF算法在测角维不抑制干扰,在非测角维u=-0.086, 0和0.422处均产生零陷抑制干扰,因此在主瓣区域内产生了两条零陷,主瓣区域发生严重畸变。EMP-CMR算法未能在干扰处产生零陷。
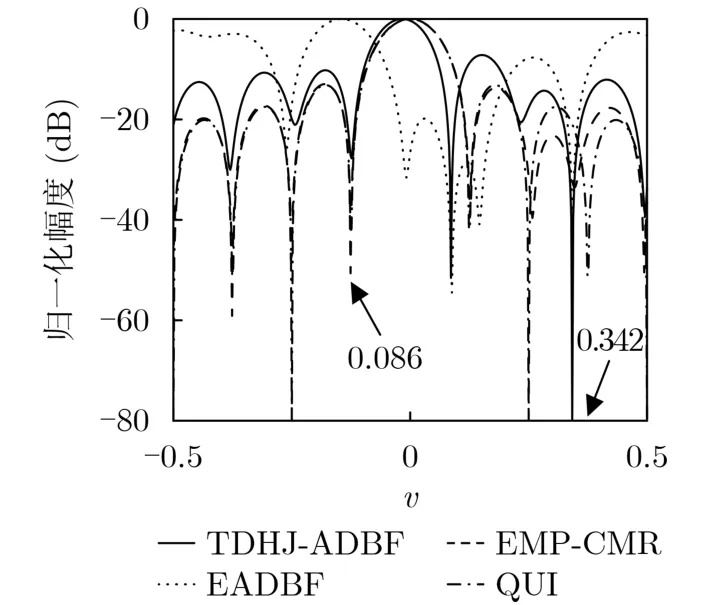
图8 u维测角时第2级波束形成(v维)方向图
4.5 单脉冲测角性能分析
通过蒙特卡罗仿真来分析4种算法在抗干扰后的单脉冲测角性能,取仿真次数为L=1 000。图9给出了TDHJ-ADBF, EADBF和EMP-CMR单脉冲测角结果在u, v维的分布图。TDHJ-ADBF算法在测角维进行了主瓣保形,并且将分维后的主瓣干扰在另一维进行抑制,因此单脉冲测角结果没有出现偏差,并且散布区域很小。EADBF算法在u维测角时选择非测角维v维抑制干扰,导致目标信号与干扰信号一同被抑制,使得全阵波束形成后目标信噪比降低,引起单脉冲测角性能恶化。EMP-CMR算法未能有效抑制干扰信号,因而测角偏差较大。

图9 3种算法单脉冲测角结果
4.6 运行时间仿真
本节对算法运算时间进行了对比。TDHJ-ADBF, EMP-CMR, EADBF 3种算法各执行100次自适应权重计算的运行时间如表3所示,算法运算时间从短到长依次为EADBF, TDHJ-ADBF和EMPCMR。EADBF算法虽然耗时最短,但是当干扰与目标信号在方位/俯仰维取值接近时,存在目标信号信噪比降低的问题;EMP-CMR算法耗时最长,且在多个干扰功率接近时,无法正确识别出主瓣干扰导致干扰抑制性能失效;本文算法在这两种场景下都能够保持良好的测角准确性,且耗时较低。

表3 100次权重计算运行时间(s)
5 结论
本文针对矩形平面阵列天线设计了2维分级联合自适应单脉冲波束形成算法TDHJ-ADBF,采用2维分级处理架构,第1级通过C-MUSIC快速搜索和测量测角维主瓣干扰方向,采用阻塞矩阵预处理和自适应权重联合约束完成测角维旁瓣干扰抑制,第2级在非测角维实现残余干扰的抑制。TDHJADBF算法将主、旁瓣干扰进行分维与分级抑制,保持了测角维单脉冲鉴角曲线线性。仿真结果表明,TDHJ-ADBF算法在同时存在主、旁瓣干扰情况下具有良好的干扰抑制能力,以及高精度的单脉冲测角性能,并且计算量较低。TDHJ-ADBF避免了当多个干扰功率接近时EMP类算法无法准确估计干扰特征向量和干扰抑制性能恶化的问题,同时也避免了当干扰与目标信号在方位/俯仰维取值接近时EADBF算法信噪比降低与测角精度下降的问题。
猜你喜欢
科技视界(2022年26期)2023-01-16
北京航空航天大学学报(2020年3期)2021-01-14
数学物理学报(2018年4期)2018-09-14
航天电子对抗(2018年3期)2018-07-14
电子测试(2018年6期)2018-05-09
测绘科学与工程(2016年6期)2016-04-17
制导与引信(2016年3期)2016-03-20
舰船电子对抗(2015年4期)2015-03-25
弹箭与制导学报(2015年1期)2015-03-11
电子与信息学报(2014年12期)2014-06-02