可重构智能表面辅助双功能雷达通信系统的联合波束优化
2024-01-27 06:56王华华朱鹏云
电子与信息学报 2024年1期
王华华 孙 宸 朱鹏云
(重庆邮电大学通信与信息工程学院 重庆 400065)
1 引言
随着无线通信行业的快速发展,到2025年,全球连接设备数量预计将达到750亿台,如此海量的连接设备和超高的服务质量,导致频谱资源变得越来越拥挤[1]。而且在10 GHz以下的频段,4G,5G无线通信系统与雷达系统存在相互竞争,限制了无线通信系统和雷达系统的性能[2]。
近年来,雷达系统与无线通信系统在频谱共享(Radar and Communication Spectrum Sharing,RCSS)的情况下,两系统各自运行且没有重大性能损失引起了研究者的注意[3,4]。在雷达与通信的频谱共享系统下,主要设计都是围绕雷达和通信系统的干扰管理,即在满足通信信号与干扰加噪声比(Signal to Interference plus Noise Ratio, SINR)约束情况下,来优化雷达探测的性能,或者反过来。而最新的研究方向是将这两个系统共同设计,共同设计是将两个系统集成到一个单一的平台,也称双功能雷达通信系统(Dual Functional Radar Communication, DFRC),此系统感知和通信可以同时进行[5]。DFRC系统设计可以支持目标检测和携带信息,这也允许较低截获率[6-8]。存在两种设计方案:一种是以雷达为中心,另一种是以通信为中心。
以雷达为中心的DFRC的主要思想是不影响雷达功能的情况下,将信息嵌入到雷达的旁瓣波形中。例如,通过波束形成调制和指数调制来嵌入信息[9,10]。然而上述方法中,一个通信符号由一个或几个雷达脉冲表示,这导致通信速率受雷达脉冲重复频率的限制。
在以通信为中心的DFRC中,目标数据都是从回波通信波形中提取。与以雷达为中心的方法相反,以通信为中心的方法能够通过仔细设计波形来支持更高的通信速率并保证雷达性能。因此该文主要关注以通信为中心的波形设计。
近年来,可重构智能表面(Reconfigurable Intelligent Surface, RIS)技术引起了工业界和学术界的极大关注。RIS由大量被动且低成本的反射元件组成,他们中的每一个能够独立地调节入射信号的相移和幅度,使其能够朝向感兴趣的方向[11]。最近,RIS还显示出在辅助雷达系统方面的好处。在文献[12]中,分别优化了多入多出(Multiple Input Multiple Output, MIMO)雷达目标检测的主动波束形成和RIS上的无源波束形成,以提高检测性能,还提出了一种RIS辅助检测算法,结果表明RIS可以产生更好的克拉默-拉奥界(Cramér-Rao Bound,CRB)。文献[13]在通信服务质量要求和功率约束下最大化了雷达的SINR。在文献[14]中,发射波形和反射系数共同设计,以最大限度地减少多用户干扰(Multi-User Interference, MUI),从而在功率约束和波束相似性方面满足雷达感知的要求下获得更好的性能。同样,在RIS辅助通信系统的背景下,加权和速率(Weighted Sum Rate, WSR)是比SINR和MUI更具代表性的指标,文献[15]首先研究了RIS辅助通信系统背景下所有用户的WSR最大化。
受上述启发,该文的目标是设计一个RIS辅助的多天线DFRC系统,并联合设计优化双功能基站的主动波束成形和RIS的被动波束成形,以最大化用户的WSR和系统的探测性能。
2 系统模型
如图1所示,该文旨在研究RIS辅助MIMO雷达和多入单出(Multiple Input Single Output, MISO)多用户通信。该系统通过M个信号天线为K个用户提供服务,用户的终端天线接收来自一个配备M个天线的基站和一个配备N个反射元件RIS的信号。该系统还可以在跟踪模式下作为雷达工作,以跟踪方位角为ϑm的一个目标。该系统的总体功率预算为P,其有两组天线,分别为Mr雷达天线和Mc通信天线,他们分别发射雷达信号和通信信号,且雷达和通信天线的功率预算分别为Pr和Pc。

图1 RIS辅助下的DFRC系统
用户k接收的信号为
其中,hk ∈CN×1是从RIS到用户k的信道增益,Gc∈CN×Mc和Gr∈CN×Mr分别是从通信天线和雷达天线到RIS的信道增益。dc,k和dr,k分别表示从通信天线和雷达天线到用户k的直接信道增益。sj是用户j的信息符号,表示用户k处从天线引入的高斯白噪声。在基站处采用线性预编码,wj ∈CMc×1是用户j的线性预编码器。x ∈CMr×1是雷达信号,且信号的协方差Rx=,L是雷达信号在快时间轴上的长度。Θ ∈CN×N是RIS处的无源波束形成矩阵,Θ=diag(ϕ),ϕ=[ϕ1,ϕ2,...,ϕN]T且|ϕN|=1,∀N。
其SINR和用户k的可实现速率为
该文的目标是最大化WSR以及在方向ϑm上的探测能力,其中WSR为
µk为用户k的权重。
在方向ϑm上的探测性能为
其中,α(ϑm)∈CM×1是转向向量,C ∈CM×M是整体信号的协方差矩阵。
对于均匀线性的天线(Uniform Linear Antenna, ULA)部署,转向向量定义为
其中,λ是信号波长,d是天线间距,设d=λ/2。
由于通信和雷达信号不相关,协方差矩阵给出为
其中,W=[w1,w2,...,wk]。
则式(5)可重写为
其中,αr(ϑm)和αc(ϑm)分别是雷达和通信天线的转向矢量。
3 DFRC系统波束优化算法设计
针对DFRC系统波束优化算法设计,目标函数是最大化用户的WSR和系统探测性能,其优化过程主要分为两步。第1步是固定被动反射系数,来优化主动波束形成;第2步是固定主动波束形成,来优化被动反射系数。当信道状态信息(Channel State Information, CSI)已知时,系统的波束优化和RIS优化问题表述为
其中,式(9)的目标函数第1项是WSR,其余项表示雷达在方向ϑm的探测性能,这两个指标都通过使用参数ρ进行正则化来最大化。C1是雷达实现中的功率约束[16]。C2是通信的总体功率预算约束,C3是约束协方差矩阵Rx为埃尔米特(Hermitian)和半正定,C4是反射系数的约束。
很明显该问题是非凸的,该文利用加权最小均方误差(Weighted Minimum Mean Square Error,WMMSE)和分式规划(Fractional Programming,FP)算法来进行求解,使其可以转化为关于W,Rx和Θ的两个优化问题。
3.1 对于给定的反射系数,优化主动波束形成
根据文献[17]提出的WMMSE方法,可以将式(9)中WSR最大化问题转化为WMMSE问题。
所以噪声加干扰功率为
通过均衡器gk解码用户处的sk,并得到sk的估计值=gkyk。因此,估计的均方误差定义为
最优均衡器和最小均方误差在∂ek/∂gk=0时,最优均衡器得到为
因此,可以转换为另一个均方误差最小化和探测功率最大化问题
这个问题最后一项是非凸的,根据文献[18]中的变换方法,最后一项等于
因为Z(ϑm)是一个半正定矩阵,所以式(18)是一个凸函数。因此式(16)可以重写为
对于给定的Θ,WSR和探测性能最大化可以通过更新ωk和求解问题式(19)之间交替来解决,问题式(19)是半正定规划(Semidefinite Programming,SDP)问题,CVX工具箱可以有效解决。
3.2 对于给定的主动波束形成,优化反射系数
对于给定的W,Rx,式(9)可以重写为
为了处理复杂的目标函数,该文根据文献[19]采用FP方法将其转换为多项式表达式。具体来说,基于拉格朗日对数重构,引入辅助变量βk,从对数函数中取出比值项γk,并转换为
当辅助变量βk取最优值时,目标函数式(21)等价于式(23),其最优值为
由于式(23)中第3个比值项导致不能直接求解,因此需进一步应用二次变换将其转换为
根据式(23)和式(24),可以将式(21)转变为
其中,
观察到求解问题式(27)的主要困难是式(28)中非凸单位模数约束,该文采用了流形优化算法。具体来说,目标函数是平滑的,并且单位模数约束形成一个复杂的圆形黎曼流形,这使得问题可以用典型的黎曼共轭梯度算法来解决,利用共轭梯度算法思想,可以在黎曼空间上迭代求解问题。可以参考文献[20]了解更多细节。
4 仿真结果与分析
该文考虑基站在RIS辅助下对小区用户进行通信。该基站配备了具有M=8个均匀线性排列的天线,RIS配备了N=100个线性部署的反射元件。该系统为下行链路K=4个用户服务,功率预算为P=20 dBm,用户噪声功率为-90 dBm,雷达目标的方向从基站出发为0。利用文献[21]中典型相关路径损耗模型,路径损耗将基站到用户、基站到RIS和RIS到用户链路的路径损耗指数分别设置为αBu=3,αBR=2,αRu=2。设基站到RIS和RIS到用户的信道服从莱斯衰落,基站到用户的信道服从瑞利衰落。
如图2所示的3维坐标中,基站、RIS和小区中心的坐标分别为(0,0,0),(1 0 0,6 0 0,2 0 0),(400,500,0),其中小区范围为正六边形,边长为100 m。

图2 基站、RIS和小区位置仿真图
图3展示了在不同参数ρ下迭代算法的收敛性能。从图3中可以看出,通过该文算法获得的加权和速率首先随着迭代次数单调增加,随后进行迭代快速达到收敛。表明了所提算法对求解该问题的有效性和较低复杂度。

图3 不同 ρ下迭代算法的收敛性能
图4展示了在加权和速率为4.6 bit/(s·Hz)时,反射元素的数量对系统发射波束波形的影响。可以看到,仅具有雷达功能系统,其主瓣波峰更大,表明具有很好的方向探测性。在DFRC系统且无反射元件时,在0°方向上具有很小的波峰,探测性能受到了很大的限制。在加入反射元件后,随着反射元素数量的增加,获得了更好的波束方向图和更高的目标探测性能。

图4 反射元素的数量对波束方向图的影响
在图5中可以看到,随着反射元素数量的增加,系统的最大和速率不断增大,在具有100个元素的RIS下能将加权和速率提高了0.86 bit/(s·Hz)。虽然RIS可以增加WSR的上限,但是探测功率上限都是固定的,其原因在于探测功率的上限取决于基站的性能,反射元件数量的增加对基站的性能无影响。
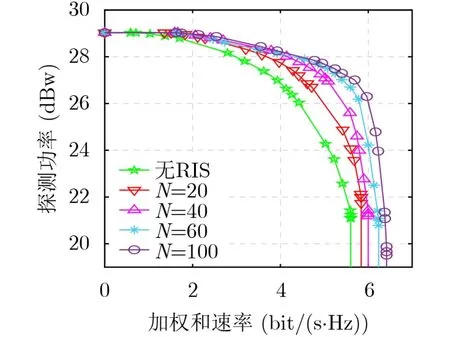
图5 反射元素的数量对系统性能的影响
5 结束语
本文研究了RIS在DFRC系统中的应用。在雷达功率约束、通信总体发射功率和反射系数约束下,对发射波束和反射系数进行了联合优化,设计了求解该问题的有效交替算法。仿真结果表明,在DFRC系统中部署RIS,有效地提高了加权和速率和系统探测性能。在该文中,系统的CSI是已知的,后续可以在CSI未知的情况下,利用雷达具有感知的能力进行后续工作,且该文中雷达探测能力相较于更具代表性指标(检测和误报概率),是比较简单的评估雷达性能指标。
猜你喜欢
通信技术(2019年3期)2019-05-31
电子测试(2018年6期)2018-05-09
声学与电子工程(2017年1期)2017-06-22
中国交通信息化(2017年10期)2017-06-06
探索科学(2017年4期)2017-05-04
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
中国交通信息化(2016年8期)2016-06-06
移动通信(2015年17期)2015-08-24
四川师范大学学报(自然科学版)(2015年4期)2015-02-28