
基于主成分分析的光伏热斑红外图像混合噪声去噪方法
2024-02-28 11:45欧阳名三汪义鹏丁希鹏
重庆工商大学学报(自然科学版) 2024年1期
蔺 怡,欧阳名三,汪义鹏,丁希鹏
安徽理工大学 电气与信息工程学院,安徽 淮南 232002
1 引 言
热斑故障是光伏板长期运行中的一种典型故障问题,目前常见的热斑故障检测方法主要分为并联旁路二极管法、基于电流电压的故障检测方法和基于热成像技术的故障检测方法[1]。其中,基于热成像技术的故障检测方法利用热斑区域温度明显高于正常光伏组件平均温度这一特点,通过红外设备对光伏板进行实时拍摄获取图像,实现对热斑的快速检测。该方法检测成本低、效率高、故障定位精确,是光伏热斑检测技术研究的热点。
考虑在进行红外图像拍摄时,容易受到外界环境的随机干扰及成像设备内部变化等因素的影响,红外图像会包含多种噪声[2]。陈文勤[3]采用核数为5×5的二维高斯滤波器对热斑图像进行去噪处理,该滤波器能够在满足噪声消除需求的同时充分保留边缘细节,但对图像中的椒盐噪声几乎没有过滤效果;周世芬[4]对比验证了邻域平均滤波、高斯滤波和中值滤波这3种传统空间滤波算法的实验结果,最终选用了滤波效果更好、图像更清晰的中值滤波方法,但该算法应用于高密度噪声去噪处理时效果较差;蒋琳等[5]提出一种基于灰度直方图的B样条最小二乘拟合红外图像处理方法,B样条最小二乘拟合算法可以在精确检测热斑的同时抑制噪声,但该算法只是将非热斑区域进行了分割,并未对图像噪声进行针对性处理;任超等[6]使用的混合噪声去噪算法在经典BM3D(3D Block Matching)算法的基础上增加了多级非线性加权平均中值滤波,提高了对混合噪声中椒盐噪声的滤除能力,但该算法计算量大,复杂度较高,不利于实际应用。综上所述,光伏热斑红外图像混合噪声去噪算法相关研究的应用性仍有待加强,且缺少针对性的混合噪声滤除算法。
本文通过对光伏热斑红外图像中的噪声进行分析,总结得出热斑红外图像主要含有高斯噪声和椒盐噪声,针对高斯-椒盐混合噪声的滤除问题,提出一种基于主成分分析(Principal Component Analysis,PCA)的混合噪声自适应去噪算法。该算法在对噪声图像进行PCA变换之前采用自适应窗口预处理操作,可以滤除图像中的部分噪声以减小噪声估计时的误差,同时针对高强度噪声情况,算法先对预处理图像的噪声水平进行估计并更新,再进行二次PCA变换,实现对噪声图像的进一步去噪处理。实验结果表明:本算法经过预处理后去噪效果显著,能够保留热斑形态信息,拥有良好的主观视觉效果,同时客观评价指标均有所提高。
2 光伏热斑红外图像噪声分析
由于红外成像系统自身特质及环境变化等因素,其一般呈现以下特点:与相应的可见光图像相比,红外图像更为模糊;红外图像包含的噪声比较多,噪声强度大;红外图像具有非均匀性,直观上表现为图像的畸变等。
光伏组件红外图像不但具有一般红外图像的特点,而且由于所处环境的不同,还会产生许多影响光伏组件红外图像成像的特殊条件,如环境温度、周围障碍物、拍摄角度以及天气等,这些特点导致对光伏组件进行实时拍摄所获取的红外图像会含有许多噪声,且产生噪声种类的随机性和噪声分布的复杂性会使光伏热斑红外图像的信噪比相对较低,且图像边缘更模糊。
一般图像中包含的噪声种类繁多,按照噪声幅度的概率密度函数(Probability Density Functions, PDF)分布情况进行区分,可以分为高斯噪声、瑞丽噪声、指数噪声、伽马噪声、均匀噪声以及椒盐噪声等[7]。不同类型的噪声需要用不同的滤波器来消除,最常用的空间域去噪滤波器主要分为线性滤波器和非线性滤波器两种[8-9]。线性滤波器主要用于去除高斯噪声,如均值滤波器、线性加权滤波器、倒数梯度加权滤波器等都属于线性滤波器的范畴。而非线性滤波器主要是中值滤波器,中值滤波一般用于消除椒盐噪声[10-11]。
影响热斑红外图像的噪声主要分为两大类:高斯噪声和椒盐噪声。高斯噪声指PDF服从高斯分布(即正态分布)的一类噪声,利用红外相机进行拍照或使用热像仪采集图像时,由于仪器电子系统内部的随机变化以及物理器件本身具有的特性,所获得的红外图像容易产生高斯噪声;椒盐噪声则是在传感器进行信号传输过程中,由于外界环境的干扰,造成信号在某一点传输错误而剧烈突变形成的,会导致图像受损,像素取最大或最小灰度值(255和0),从而造成图像细节丢失,质量下降[12]。为了提高对后续热斑图像进行识别检测的效率,需要首先对图像的高斯-椒盐混合噪声进行去噪处理。
3 本文算法及实现步骤
本文根据热斑红外图像的噪声特点,提出一种基于主成分分析的热斑红外图像混合噪声自适应去噪算法。主成分分析法通过PCA变换进行降维处理,提取信息分量,舍弃噪声分量,实现降噪目的。PCA算法对于高斯噪声有明显去噪效果,但噪声的存在会影响PCA变换矩阵的精确度,尤其是在处理椒盐噪声等非高斯分布噪声时,PCA算法提取的主成分与真正的信息分量有一定偏差。由于主成分分析法在混合噪声滤除方面具有一定的局限性,所以将采集到的光伏热斑红外图像先进行自适应窗口预处理,滤除大部分椒盐噪声,降低PCA变换时噪声对主成分提取范围的影响,然后利用图像的局部相似性进行PCA变换,提取出主成分后再采用线性最小均方误差(linear Minimum Mean Squared Error,LMMSE)算法进行去噪处理。该算法可以在有效去除高斯噪声和椒盐噪声的同时,很好地保持图像的细节信息,并提高图像的信噪比,方便后续的热斑提取与故障检测工作。
3.1 自适应窗口预处理
椒盐噪声在红外图像中表现为一种随机出现的白点或者黑点,其像素值为0或255。假设对一幅含有椒盐噪声红外图片的某一区域内所有像素的灰度值从大到小进行排序,则在这个序列数组中,所有椒盐噪声点的灰度值一定会分布在数组的两端,将这个数组两端的所有极值点(疑似噪声点)去除后,用剩余像素点的灰度值中值来代替疑似噪声点的灰度值,这样就可以在有效保留红外图像像素信息的同时滤除噪声点对图像内容的影响[13-15]。
在这一噪声滤除环节,直接影响去噪效果的一个关键因素是所选取滤波窗口的大小。对于固定的滤波窗口,去除噪声和保护图像细节信息的目标是矛盾的:如果选取的滤波窗口较小,窗口内像素点的灰度值变化较小,剩余像素灰度值的中值与被替代像素点的灰度值误差较小,能够更好地保护图像中的一些细节信息,但同时部分噪声点也会被误认为图像信息点而得到保留,降低椒盐噪声的滤除效果;反之,如果选取的滤波窗口尺寸比较大,窗口内像素点增多意味着灰度值样本变大,可以更准确地识别噪声点,虽然会获得更好的噪声滤除效果,但可能会因为剩余像素灰度值的中值与被替代像素点灰度值误差大而丢失图像中的部分细节信息,使处理后的图像变得模糊[16]。因此,本文设计算法通过判断固定滤波窗口内每一个像素点的灰度值是否是极值来确定椒盐噪声点的数量,提出可以根据初始窗口内椒盐噪声点数量的多少进行滤波窗口自适应变化的预处理算法。自适应窗口预处理算法流程图如图1所示。
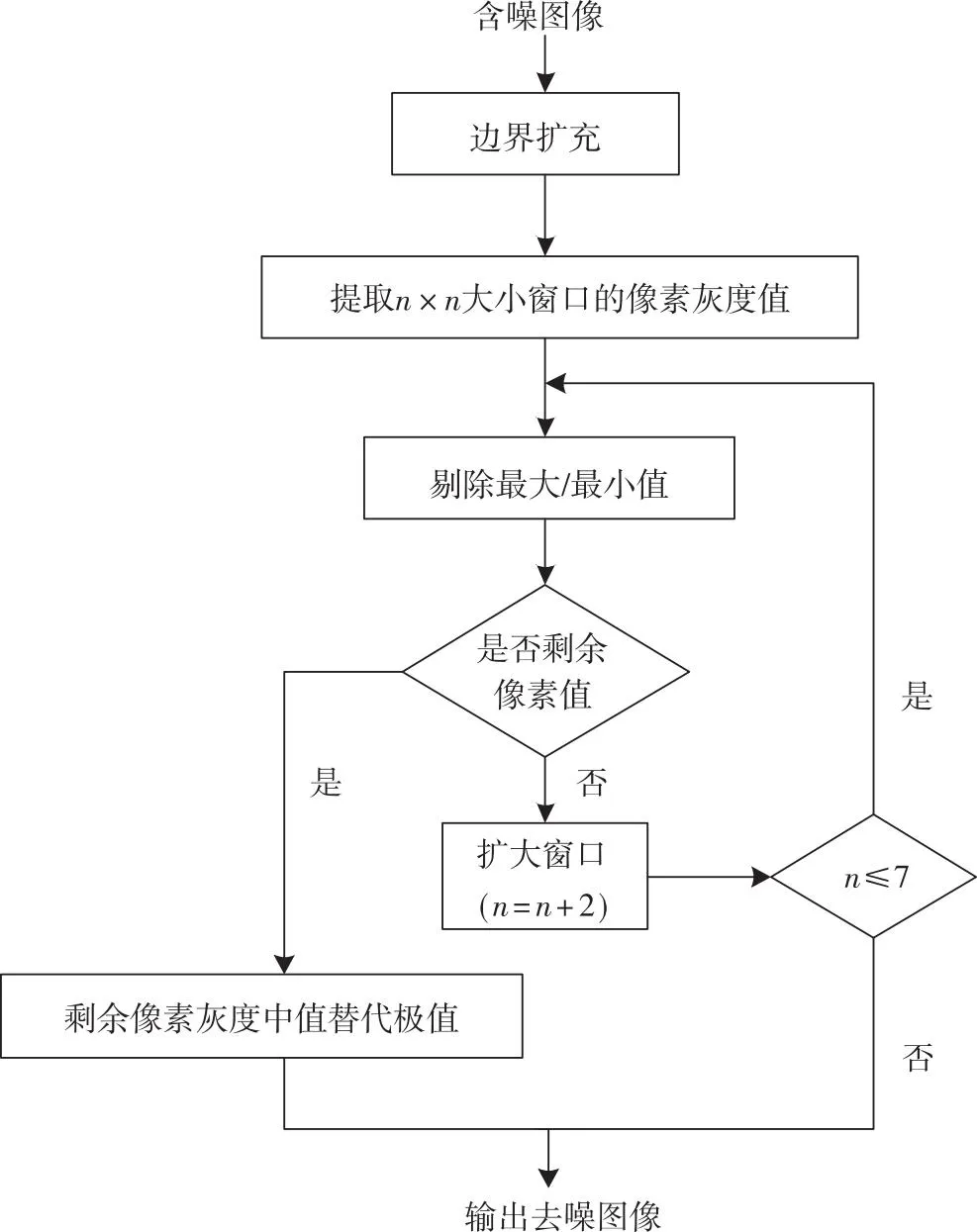
图1 自适应窗口预处理算法步骤图
在本文算法中,初始窗口大小被设定为3×3,窗口最大可扩充至7×7。若剔除极值后的3×3窗口内仍剩余像素值时,认为当前窗口内噪声较小,直接进行灰度中值替换操作,可最大限度保留图像细节信息。当检测到3×3窗口内全是极值点时,扩大窗口至5×5,重新进行检测,最终可在7×7大小的窗口内进行检测。若检测到7×7大小的窗口内仍是全为极值点的情况(概率极小),则考虑极值点可能是原图像信息中的像素点,故不进行灰度中值替换操作。
本算法首先对图像进行边缘扩充,然后根据预设好的条件动态改变滤波窗口的尺寸,完成噪声滤除的同时兼顾保护了细节信息,可实现以下去噪要求:滤除椒盐噪声;平滑其他非脉冲噪声;保护图像中的细节信息;检测到噪声较少时不用扩大窗口,既保证了去噪效果又节省了时间。
3.2 基于块匹配的PCA图像去噪
主成分分析法是一种基于统计理论的字典学习算法[17],通过PCA变换可以将高维空间的计算问题转化到低维空间进行处理,大大提高了运算效率。在图像去噪领域,利用主成分分析法可以提取图像的主要信息特点,对含噪图像进行PCA变换,可以实现针对高斯白噪声的明显去噪效果[18]。
使用主成分分析法需要采集充足的训练样本,本文采集训练样本的方法结合块匹配(Local Pixel Grouping,LPG)思想,将待去噪的像素点及其最近邻捆绑组成一个变量块,并将该变量块看作一个整体,在附近区域内寻找与其结构相似的部分像素块作训练样本[19-20]。如图2所示:以待去噪像素点为中心,设置一个窗口大小为b×b的变量块,然后以b×b变量块中的每一像素为左上顶点选取对应大小为(s+1)×(s+1)的训练样本,得到b2×(s+1)2大小的原始训练样本集。在该原始样本集中,某些像素块可能在结构上与待去噪变量块有很大的差异,如果直接使用样本集中全部的训练样本进行训练,不但会增加计算的工作量,同时还会使PCA变换得到的协方差矩阵不准确。为解决这一问题,本算法采用在训练框中选取与待去噪变量块的欧氏距离最近的L组训练样本,组成b2×L大小的训练样本集。样本数量L的取值决定了算法运行的效率和最终去噪效果,文献[19]中的测试数据结果显示:L的取值范围在2b2~ 5b2较为合适,本文取L=250。
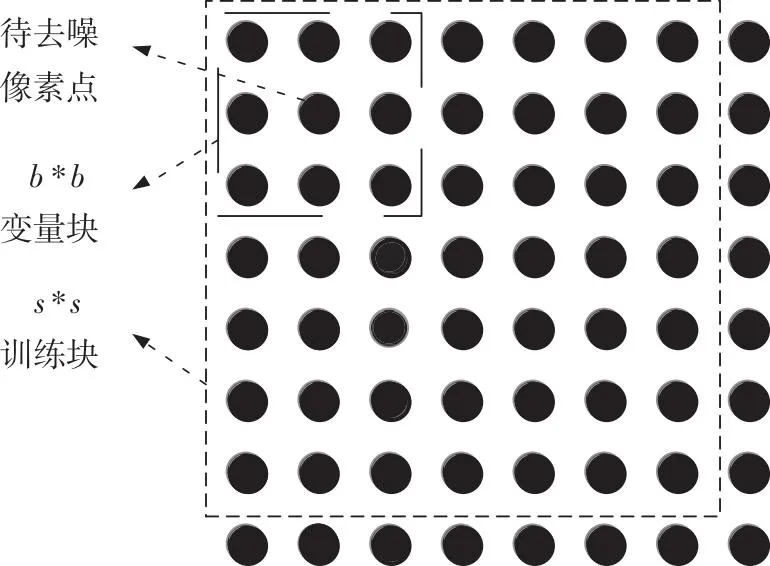
图2 基于LPG-PCA的去噪模型
在一个数据集中,一般认为信息分量的方差远大于噪声分量的方差。根据这一理解,将一幅图像进行PCA变换就是将图像中所有信息组成的n维数据集投影到k维上(n>k),以寻找最大方差的方向[21]。以一个n行m列的矩阵X为例,进行PCA变换的计算步骤如下:

(2) 计算矩阵Xi的协方差矩阵CX,并求出协方差矩阵CX的特征值对角阵Λ以及对应的特征向量矩阵Φ:



将原始数据集进行PCA变换后得到一个新的数据集。一般来说,原始噪声图像的主要信息分量会集中在新数据集中的几个小子集上,而噪声分量会均匀分布在整个新数据集中。因此,在PCA变换域中,可以更好地区分图像主要信息和噪声信息。本文采用线性最小均方误差估计(LMMSE)法[22-23]对PCA变换域中的含噪矩阵Yn进行降噪处理,算法公式如下:

其中,var(·)为方差,x表示原始无噪像素的真实值,y表示含噪像素值,σ代表原始噪声的标准差。

3.3 更新噪声水平
当原始噪声图像中的噪声含量较多时,不仅会使块匹配时的训练样本集选取有误差,还会导致进行PCA变换后含噪矩阵的估计出现偏差[19],这些影响都会致使最终降噪效果不理想。为了获取视觉效果更好的去噪图像,本文在原始噪声图像经过PCA算法一次处理后,重新计算去噪图像的当前噪声水平并进行更新代入,然后根据新的噪声标准进行二段LPG-PCA去噪流程。

其中,N表示原始图像中的噪声,Ns为一段去噪后图像中的残余噪声,令其标准差为σs,则噪声标准差的估计值可表示为
在实际应用中,进行噪声估计时不仅要计算一次去噪后的噪声残差,还要考虑原始噪声图像Xn的估计误差。因此,设置一个常数参量cs(0 最终,噪声估计值σs的表达式为 其中,本文取cs=0.36。 综上所述,本文所用去噪算法流程图如图3所示。 图3 基于主成分分析的混合噪声自适应去噪算法流程图 本文选取以下两种参数对光伏热斑红外图像的去噪效果进行评价[24]。 (1)RPSNR(Peak Signal to Noise Ratio),峰值信噪比。RPSNR的单位是dB,其数值越大表示图像的失真越小。公式如下: 其中,RMSE指当前图像与原始图像之间的均方误差值。 (2)RSSIM(Structure Similarity),结构相似性。RSSIM分别从亮度、对比度以及结构三个方面度量图像的相似性,取值范围为[0,1],其数值越大表示图像失真越小。公式如下: 其中,μX、μY分别表示原始图像X和去噪图像Y的均值;σX、σY分别表示原始图像X和去噪图像Y的方差,σXY表示原始图像X和去噪图像Y的协方差;C1、C2为常数,设置常数C1、C2是为了避免出现分母为0的情况,通常情况下取C1=(0.01×255)2、C2=(0.03×255)2。 本文在Windows 11 Home 64位操作系统的计算机上以MATLAB R2019a为程序仿真运行平台,处理器为Intel(R) Core(TM) i5-11260H @ 2.60 GHz,内存为16.0 GB。为了验证上述算法的有效性和实际可行性,选取两幅大小为256×256像素的光伏热斑红外图像[1],对两幅图像同时加入不同程度的高斯噪声和椒盐噪声(5/0.05、10/0.1、20/0.3),选取两种图像去噪算法分别对加噪图像进行滤波处理后与本文算法的去噪结果进行对比,分别是修正的阿尔法均值滤波算法[15]、NL-means算法[25]。其中,修正的阿尔法均值滤波器是一种非线性空间域滤波器,它将滤波范围内的数据按从大到小和从小到大的顺序进行排序,去除部分数据后计算剩余均值以代替去噪点像素值,实现了去噪目标,适用于被混合噪声污染过的图像进行去噪;NL-means算法通过对图像进行加权平均来滤除噪声,采用两步去噪方法,首先进行相似组块的选择,用以待去噪像素点为中心的图像块之差的欧氏距离求出其权值,然后进行NL-Means算法计算,NL-Means算法可以较好地抑制白噪声,对图像结构也有较好的保持能力。各算法的RPSNR/RSSIM结果对比见表1。 表1 不同算法的去噪效果比较(RPSNR/RSSIM) 从表1可以看出:NL-means算法针对低密度混合噪声有较好的去噪效果,在混合噪声等级为5/0.05时,经NL-means算法去噪后的两幅图像峰值信噪比分别为27.498 8 dB和25.087 8 dB,但随着噪声密度增加,在噪声等级为20/0.3时,峰值信噪比仅为16.355 8 dB和15.317 7 dB,其降噪性能下降约39.73%。与此同时,在低密度高斯噪声和椒盐噪声污染下,本文所采用的自适应算法与修正的阿尔法均值滤波算法去噪结果评价相近。但随着混合噪声污染程度的增加,本文算法的去噪效果在峰值信噪比和结构相似性两种客观评价指标上均优于修正的阿尔法均值滤波算法。在噪声强度为20/0.3时,本算法的峰值信噪比相较于修正的阿尔法均值滤波算法平均高出2 dB,结构相似性相较于修正的阿尔法均值滤波算法也多出0.13左右。 图4对比展示了无背景的多热斑红外图像在噪声污染为10/0.1的情况下原始含噪图像与经过NL-means算法、修正的阿尔法均值滤波算法以及本文算法去噪后的图像去噪效果。图4中可以看出:在该噪声强度下,经过NL-means算法去噪后的图像在噪声减少的同时,图像细节信息也相应减少了,且热斑区域边缘模糊不清,只能看到大概的轮廓,这样的去噪效果必然不利于后续的热斑提取与检测工作。反观,本文算法与修正的阿尔法均值滤波算法在去除噪声的同时都对图像轮廓及热斑区域的边缘信息有较好的保留,但修正的阿尔法均值滤波算法使图像部分边缘出现了轻微的锯齿状,因此,本文算法的视觉效果优于修正的阿尔法均值滤波算法。 (a) 含10/0.1噪声图像 (b) NL-means算法 图5为含有大量背景信息的光伏热斑红外图片在噪声强度为20/0.3情况下的原始含噪图像与经过NL-means算法、修正的阿尔法均值滤波算法以及本文算法去噪后的图像去噪效果的对比。可以看出:在高强度噪声污染条件下,NL-means算法的降噪性能较差,较难恢复图像所包含的原有信息,图片中难以分辨热斑区域形态;同时,修正的阿尔法均值滤波算法对含噪原图像的整体具有良好的降噪能力,但对于部分细节信息也容易被滤除,不能较好地保持图像轮廓细节,热斑边缘信息被破坏。而经过本文算法去噪后的图像能够清晰地保留热斑形态,光伏板与背景区域的边界区分明显,视觉观感优于前两者,便于后续热斑的提取与检测。 (a) 含20/0.3噪声图像 (b) NL-means算法 经上述实验验证:本文算法拥有较其他算法更为明显的去噪效果。但本文算法仍存在改进空间,比如虽然针对高强度噪声的二次处理效果比一次处理有明显改善,但低强度噪声水平下两次处理的效果单独看没有较大差别,可以理解为本算法在进行低密度噪声去除时进行了重复工作,性价比不高。因此,未来的算法改进工作可以考虑在进行主成分分析前先识别预处理后的噪声强度,以确认是否进行二次PCA变换操作,在保证去噪效果的同时提高工作效率。 在分析了光伏热斑红外图像的噪声特点后,发现高斯噪声和椒盐噪声为影响图像质量的两大典型噪声,且噪声无法避免。针对混合噪声特点,提出一种基于主成分分析的光伏热斑红外图像混合噪声自适应去噪算法。该算法在进行主成分分析前对噪声图像进行了自适应窗口预处理,减小了PCA变换时对噪声估计的误差,同时考虑高强度噪声难以去除的问题,在一次去噪结束后重新计算当前噪声水平,进行二次PCA变换并去噪,得到最终降噪图片。实验结果表明:无论在低强度还是高强度噪声影响下,本文算法针对高斯和椒盐的混合噪声都有较好的去噪效果,在有效滤除噪声的同时保留了热斑形态信息,避免了边缘模糊问题,用于实际工作中可提高后续热斑提取与检测工作的效率。
4 实验结果与分析
4.1 客观评价指标选取
4.2 实验结果对比



5 结 论
猜你喜欢
电子制作(2021年18期)2021-10-29
燃气涡轮试验与研究(2021年2期)2021-08-19
电子乐园·中旬刊(2021年6期)2021-05-16
小天使·二年级语数英综合(2019年4期)2019-10-06
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2019年6期)2019-07-22
四川师范大学学报(自然科学版)(2015年2期)2015-02-28
饮食科学(2014年5期)2014-06-18
电视技术(2014年19期)2014-03-11
英语学习·阳光英语(2013年2期)2013-07-04
