振荡水翼弦向主动变形提高获能效率的机理研究*
2024-02-28 11:46姜祎萌姚慧岚
中国海洋大学学报(自然科学版) 2024年3期
姜祎萌, 姚慧岚
(中国海洋大学工程学院, 山东 青岛 266100)
潮流能发电装置主要有水平轴式水轮机、垂直轴式水轮机和振荡翼式水轮机。其中,振荡翼式潮流能水轮机因具备获能效率较高、环境影响小、浅海优势明显等优点[1],越来越受到研究人员的关注。
目前,关于振荡翼式潮流能获能技术的研究多集中于刚性水翼。Kinsey等[2]通过数值模拟方法研究了俯仰角度、振荡频率运动参数对振荡水翼获能的影响。李键辉[3]和王勇等[4]通过数值模拟,得出了双水翼耦合振荡捕获潮流能发电系统综合性能较高的结论。朝黎明等[5]对非对称正弦运动俯仰振荡水翼的水动力性能及流场结构进行了研究。谈松林[6]通过数值模拟和实验研究了翼型对振荡翼水轮机潮流能获能效率的影响。王舰等[7]通过数值模拟发现平行对称的双摆翼间产生的地面效应能提高获能效率。乔凯等[8]提出的振荡水翼改进运动模型在最优性能参数设置下,捕能效率可达42.35%。孙光等[9]提出了一种能够增加整体有效攻角的带尾缘襟翼的振荡水翼结构。He等[10]提出了在振荡水翼获能过程中一种考虑角速度的有效攻角的计算公式。
近年来,关于柔性翼振荡获能特性的研究也逐渐得到关注。2011年,Wu等[11]通过数值模拟研究了低雷诺数下柔性变形对振荡翼型的影响,结果表明,较大的相位差可以产生更大的推力,而不同的变形幅度和相位差会影响其动力学性能。Liu等[12]对柔性翼在潮流能中的捕能性能进行研究,结果表明,翼型的柔性结构有利于提高动力效率和捕能效率。张俊伟等[13]对变形振荡翼的动态失速特性进行研究,结果表明,合适的变形量能够减弱翼型下俯过程中的升力振荡现象。关代涛[14]研究了弦向柔性对振荡水翼捕获潮流能性能的影响,通过数值模拟得出了增加弦向柔性提升水翼获能效率的结论。Ebenezer等[15]提出了一种根据俯仰角智能变形的柔性翼型,并对其水动力特性进行研究。Brousseau等[16]研究了材料柔度和俯仰振幅对振荡水翼的水动力性能的影响,发现在特定振荡频率下,随着材料柔性的增加,水翼效率得到了极大提高,适当的变形可以提升水翼水动力性能。
以往研究中,主要对振荡水翼的水动力特性及提高获能效率的方法进行了研究,但对具有弦向柔性的振荡水翼对提高获能效率的机理研究少有涉及。本文应用结构变形控制方程结合动网格方法对水翼弦向变形进行主动控制,并通过求解雷诺平均纳维-斯托克斯(RANS)方程和Spalart-Allmaras(S-A)湍流模型,对具有不同变形程度的振荡水翼获能过程进行数值模拟,从漩涡同水翼的相互作用、弦向压力分布以及有效攻角等角度对水翼获能差异进行分析,探讨水翼弦向变形下获能效率变化的根本原因。
1 理论概述
1.1 振荡水翼运动方程
振荡水翼的运动一般由俯仰运动和升沉运动组成,运动方程为:
(1)
式中:h(t)为t时刻水翼俯仰中心在竖直方向的坐标;θ(t)为t时刻水翼的俯仰角;h0为升沉运动幅值;θ0为俯仰运动幅值;f为振荡运动频率;φ为升沉运动和俯仰运动的相位差,取值为90°。
水翼升沉运动的瞬时速度Vh(t)和俯仰运动的瞬时角速度γ(t)的表达式为:
(2)
定义水翼弦长为c,则水翼运动过程中实际扫略高度H1的计算式为:
(3)
折算频率f*和雷诺数NRe的表达式分别为:
(4)
(5)
式中:U∞为来流速度;v为流场中流体的运动黏度。
1.2 振荡水翼水动力和能量获取性能参数
图1为水翼受力图,定义来流方向为x方向,水翼作升沉运动的方向为y方向。XC是水翼俯仰运动的旋转轴,位于距水翼前缘c/3处。水翼进行升沉和俯仰运动时受到x方向的升力Fl(t)、y方向的阻力Fd(t)以及俯仰力矩M(t)的作用。
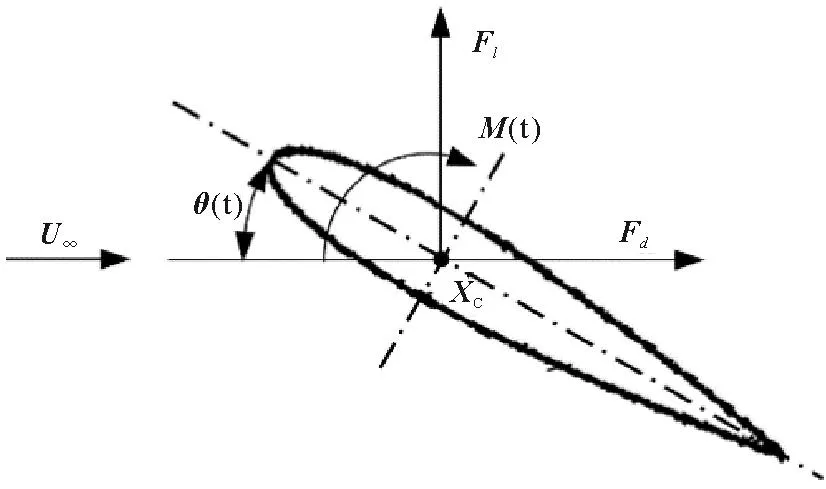
(U∞:流速 Velocity of flow;θ(t):俯仰角 Pitch angle;Fl:升力 Lift force;M(t):俯仰力矩 Pitching moment;XC:俯仰轴 Pitch axis;Fd:阻力系数 Drag force.)
水翼升力系数Cl(t)、阻力系数Cd(t)、力矩系数Cm(t)的计算式分别为:
(6)
(7)
(8)
式中ρ为流场中流体密度。
水翼能量获取功率P(t)及功率系数CP(t)的计算式分别为:
P(t)=Fl(t)Vh(t)+M(t)γ(t),
(9)
(10)
式中:CPl为水翼升沉运动功率系数;CPm为水翼俯仰运动功率系数。
(11)
(12)
1.3 振荡水翼弦向变形控制方程
水翼采用NACA 0015翼型,最大厚度位于弦长1/3处。图2为发生弦向变形的NACA 0015翼型示意图,水翼旋转轴至水翼尾缘发生柔性变形。变形控制方程[14]为:
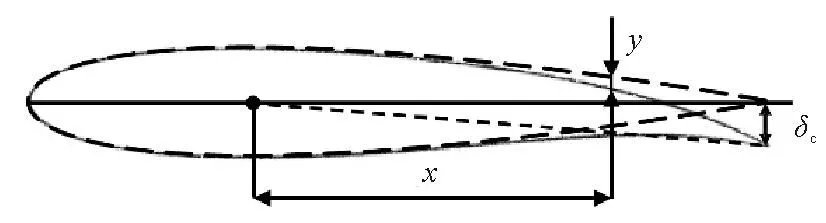
(x:距离 Distance; y:位移 Displacement;δc:尾缘最大偏移量 The maximum offset of trailing edge.)
(13)
式中:x为弦向方向上水翼尾部任意点到旋转轴的距离;y为水翼x点处的形变位移;n为柔度系数(取值为5);δc为尾缘最大偏移量。
由式(10)得知,水翼的升沉运动功率系数同升力系数有关,而升力系数大小同水翼的有效攻角密切相关。图3为考虑水翼弦向变形的有效攻角示意图。
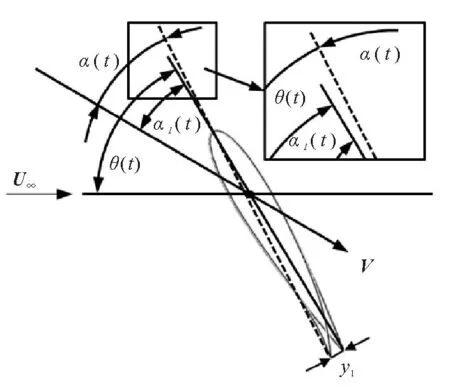
(U∞:流速 Velocity of flow;V:合速度 Sum velocity;θ(t):俯仰角 Pitch angle;α(t):弦向变形水翼的有效攻角Effective angle of attack of chordwise deformed hydrofoil; α1(t)刚性水翼的有效攻角Effective angle of attack of rigid hydrofoil;y1:尾缘最大偏移量Maximum deformation of trailing edge.)
水翼弦线方向与水翼受到的合速度方向V之间的夹角为有效攻角。有效攻角对水翼获能效率有着显著影响[10]。设在t时刻,刚性水翼的有效攻角为α1(t),此时,发生弦向变形的水翼的尾缘最大偏移量为y1,其有效攻角为α(t),刚性水翼的有效攻角弦向变形的水翼的计算式分别为:
α1(t)=|θ(t)|-|arctan(Vh(t)/U∞)| ,
(14)
y1=δcsin(2πft),
(15)
(16)
2 数值模型及验证
2.1 数值方法
计算域及边界条件如图4所示,二维振荡水翼的计算区域为75c×70c,其中c为弦长。左边界为速度入口,右边界为压力出口,上、下边界为对称边界。
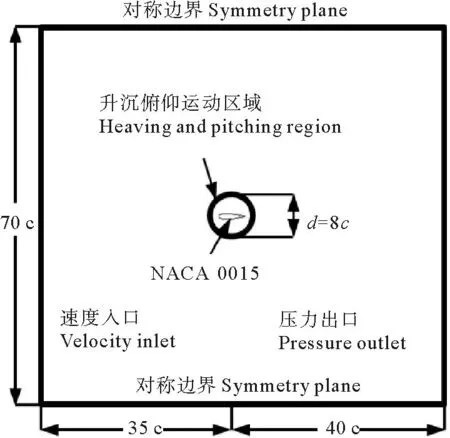
(d:直径 Diameter;c:弦长 Chord length)
图5为网格划分示意图,由75c×70c的背景网格和直径d为8c的圆形区域前景网格组成,两部分网格之间通过挖洞和嵌入实现耦合[17]。为进一步提高计算精度,对背景网格及水翼尾流区域进行局部加密。取边界层为32层,控制y+严格小于1,其中y+是无量纲壁面距离,是近壁面区域求解问题方法的选取标准。基于STAR-CCM+求解器,通过求解雷诺平均纳维-斯托克斯方程(RANS)方程对流场进行模拟,采用S-A湍流模型,基于motion模块和自定义函数功能实现水翼的俯仰升沉运动和弦向变形。
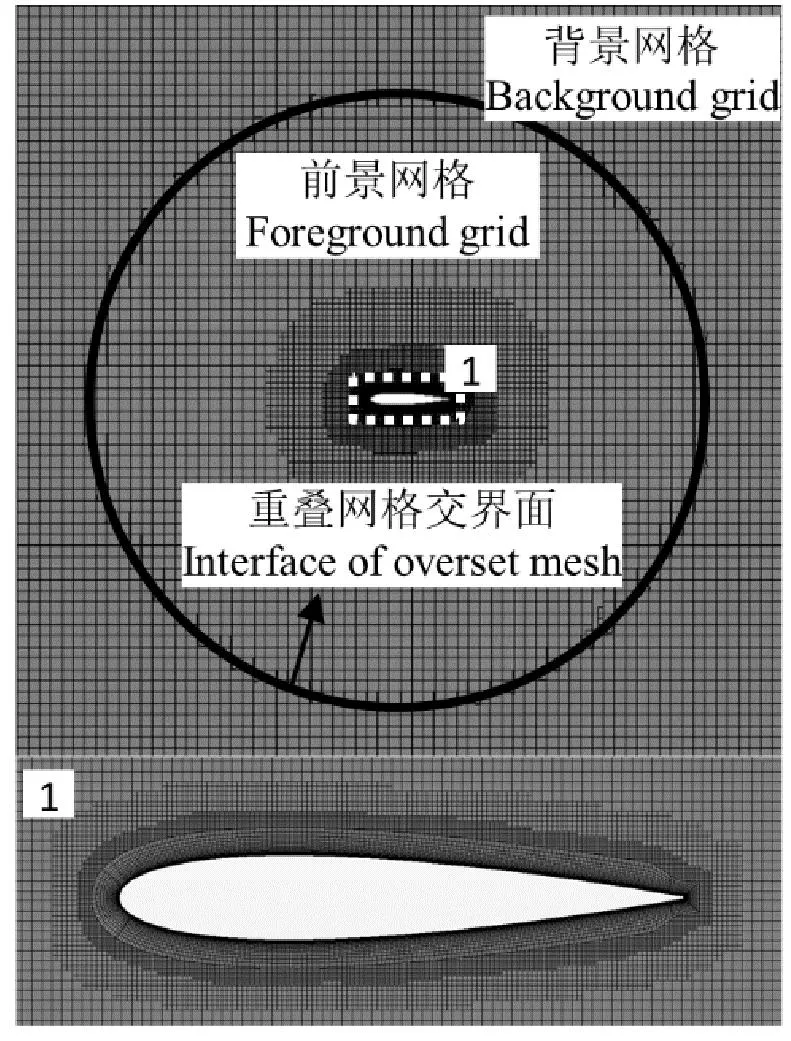
图5 网格划分
2.2 数值模型准确性验证
为了验证数值方法的准确性,选取NACA 0015翼型,按照Kinsey等[18]给出的水翼运动参数,分别对其网格尺寸、时间步长、计算结果准确性进行验证。表1为验证模型的基本参数。
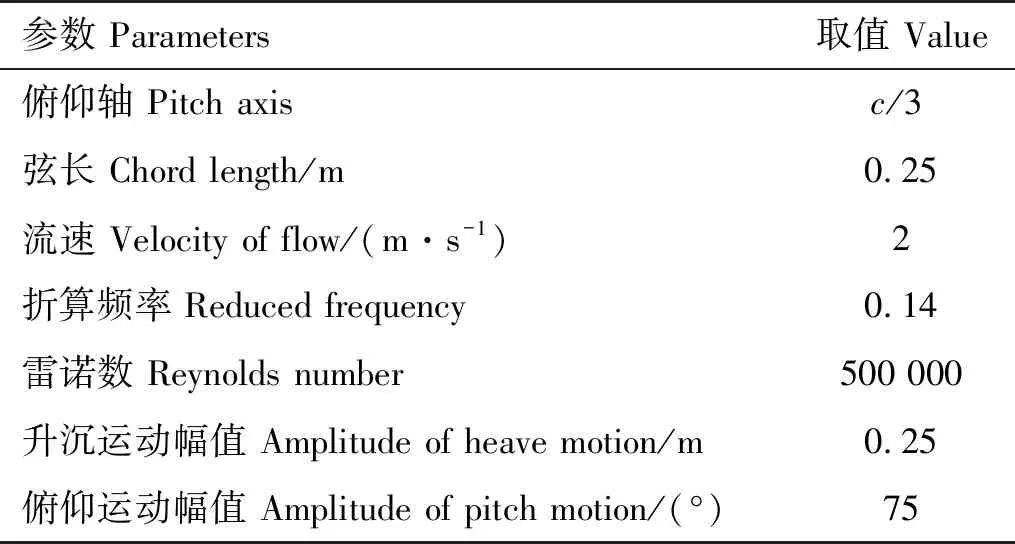
表1 验证模型基本参数
2.2.1 网格尺寸验证 表2为采用3套精细程度的网格预报的水翼获能效率η及相对百分误差(方案A和B均同方案C比较)。结果表明,当网格数从6万增加到14万时,数值结果有较大变化,说明方案A的结果受网格影响明显;当网格数从14万增加到40万时,获能效率η的相对误差小于1%,说明网格变化对结果的影响较小。为了保证精度以及节约计算资源,后续研究均采用方案B。
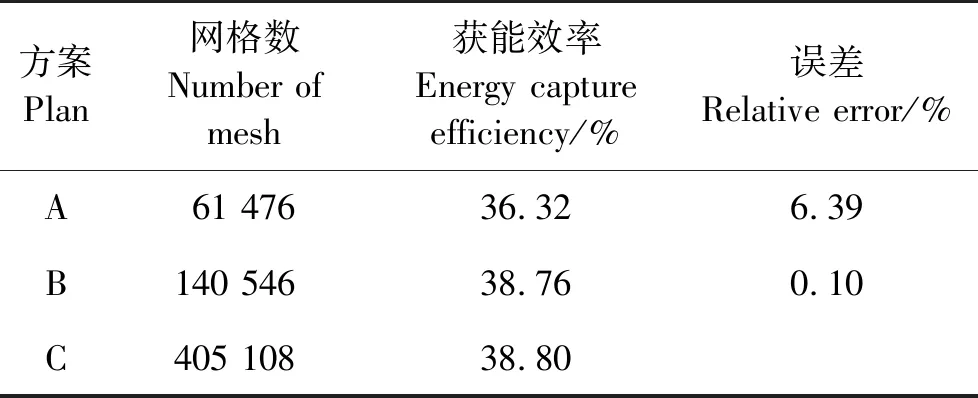
表2 网格尺寸验证
2.2.2 时间步长验证 采用三种时间步长,分别为T0/500、T0/2 000、T0/4 000(T0为水翼振荡运动周期),进行时间步长敏感性研究(相对误差均与T0/4 000比较),研究结果见表3。从表中可以看出,时间步长T0/2 000的获能效率η与T0/4 000较接近,相对误差在1%以内,考虑计算量及计算准确性,最终选用时间步长为T0/2 000。
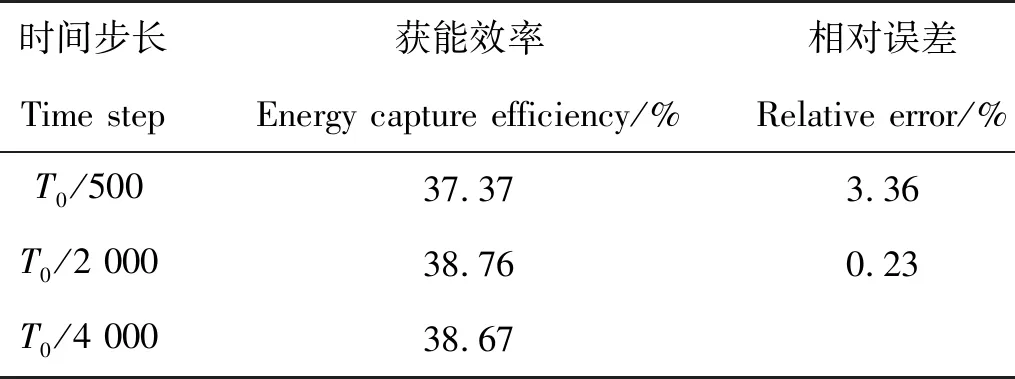
表3 方案B尺寸下的时间步长验证
2.2.3 准确性验证 基于表1中的模型参数,选择网格方案B,时间步长为T0/2 000,进行水翼数值模拟。图6为本研究中水翼一个周期内的升力系数、力矩系数和功率系数的仿真模拟结果同参考文献中的进行对比。从图中6可以看出,仿真结果与参考文献[17]中各系数曲线趋势大致相同,出现波动的位置和峰值都很相近。表4为仿真结果和文献的数据对比。从表4中可以看出,同参考文献[17]相比,仿真结果在平均阻力系数上偏差略大,相对误差为3.93%,但升力系数峰值、力矩系数峰值、平均功率系数和获能效率相差很小,相对误差均在1%左右,表明本文数值计算结果有较高的精度。

表4 准确性验证
((a)升力系数对比图Comparison of lift coefficients;(b)力矩系数对比图Comparison of moment coefficients;(c)功率系数对比图Comparison of power coefficients.)
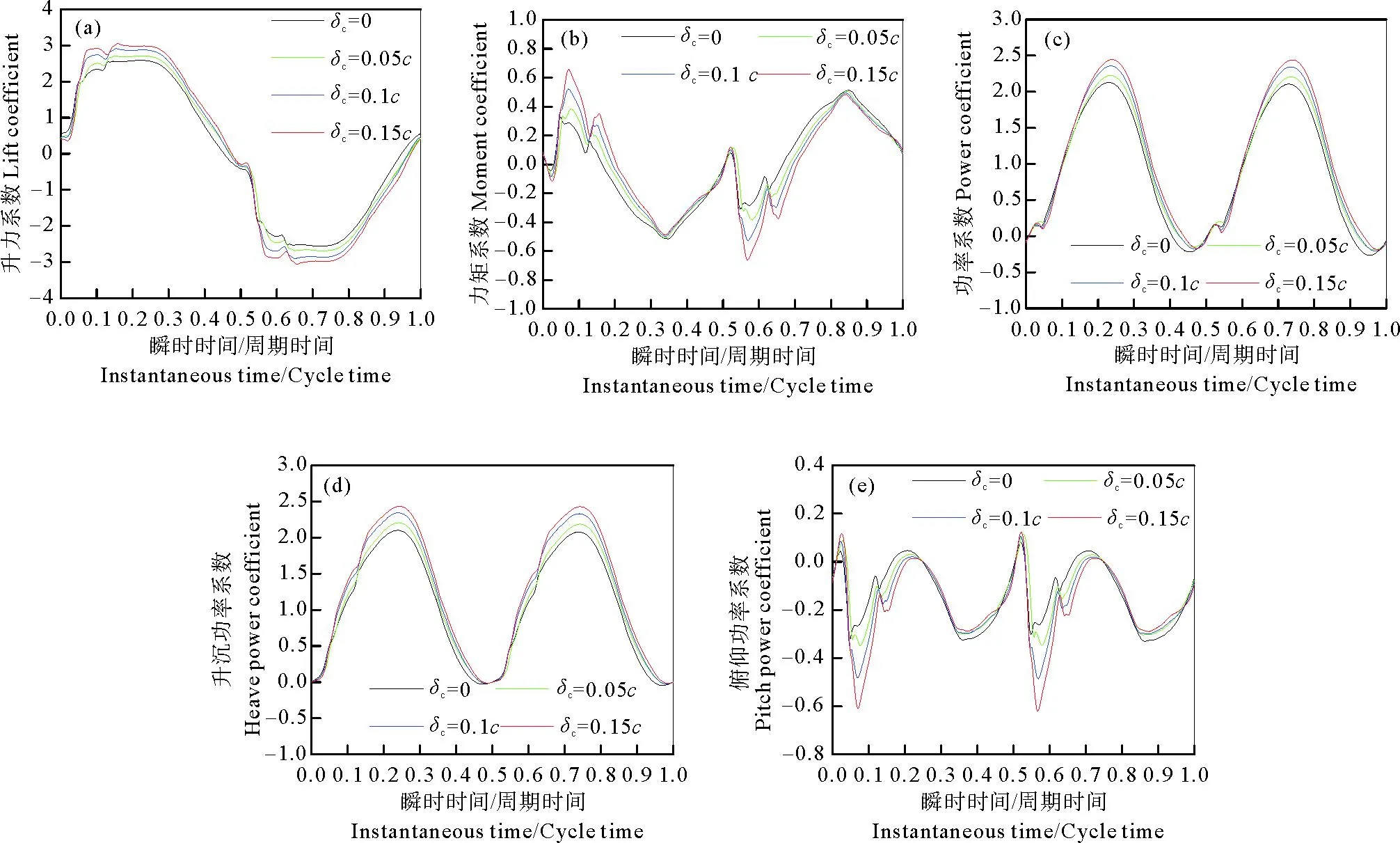
((a)升力系数 Lift coefficient;(b)力矩系数Moment coefficient;(c)功率系数Power coefficient; (d)升沉功率系数Heave power coefficient; (e)俯仰功率系数Pitch power coefficient.)
3 计算结果与分析
本研究采用NACA 0015翼型,具体参数如下:c=0.22 m;u∞=1.8 m/s;f*=0.13;h0=0.22 m;θ0=72°;δc分别取0(刚性水翼)、0.05c、0.1c和0.15c,其余参数见表1。
3.1 变形程度对水翼获能效率的影响
从7图中可以看出,一个周期内,对于具有弦向柔性的水翼,其升力系数、升沉运动功率系数、力矩系数和功率系数均随着变形程度的增大而增大,其中水翼的功率系数主要与升沉运动功率系数有关。从表5中可以看出,一个周期内,具有弦向柔性的振荡水翼的升力系数峰值、力矩系数峰值、平均功率系数及获能效率均随着变形程度的增大而增大,弦向柔性最大的水翼相较于刚性水翼获能效率提高了约19.01%。
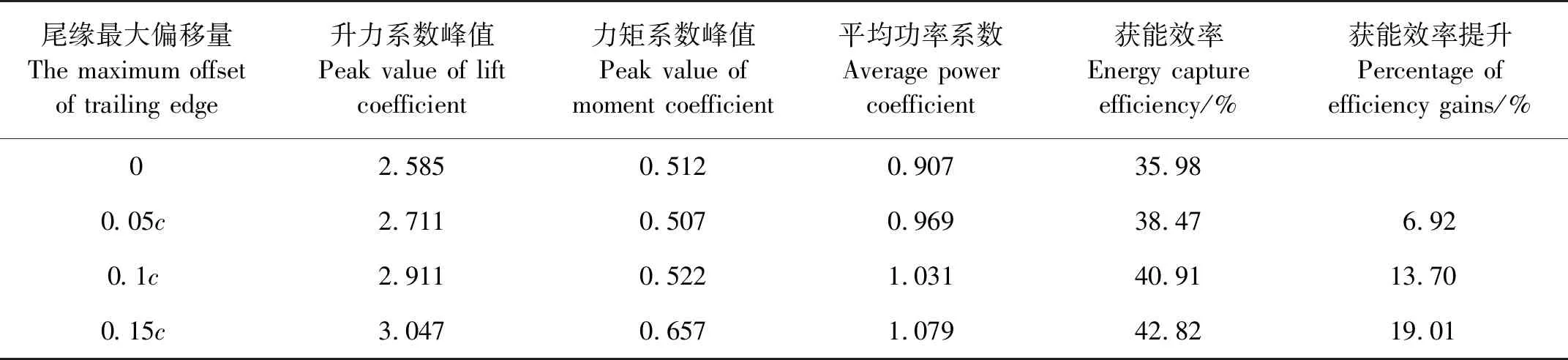
表5 不同变形程度下水翼的水动力特性及获能效率
3.2 变形影响下漩涡演化及其与结构相互作用
从图8和9中可以观察到半个周期内水翼在变形影响下漩涡演化及其同结构相互作用的过程。设t为瞬时时间,T为周期时间。从t/T=0至t/T=0.1时刻,随变形程度的增大,水翼上、下表面压力差增大,水翼下表面的漩涡强度增大,位置稍有后移,说明在变形影响下,前缘涡提前产生。随着水翼继续运动,在t/T=0.1时刻,下表面附近的漩涡逐渐脱离。从图8可以看出,在t/T=0.25时刻,还没产生明显的漩涡,而水翼前缘压力很低是水流绕过前缘,速度很快导致的。由于水翼前缘压力系数较大,对图8所示的水翼后缘部分的压力系数图进行局部放大并进行分析(见图9),此时水翼后缘上、下表面有明显的压力差,且压力差数值随着变形程度的增大而增大。这是因为水翼弦向变形会使有效攻角增大,变形程度越大,有效攻角越大,导致水翼上、下表面压力差越大。在t/T=0.4至t/T=0.5时刻,随着水翼的振荡,水翼前缘的漩涡开始变大并沿着水翼表面向尾部移动,此时随着变形程度的增大,水翼上、下表面的压力差和漩涡强度也增大,漩涡位置发生后移。
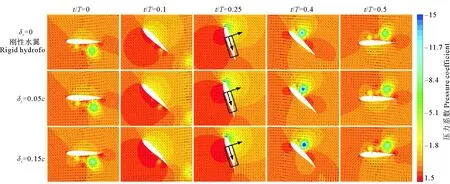
(t:瞬时时间 Instantaneous; T:周期时间 Cycle time.)
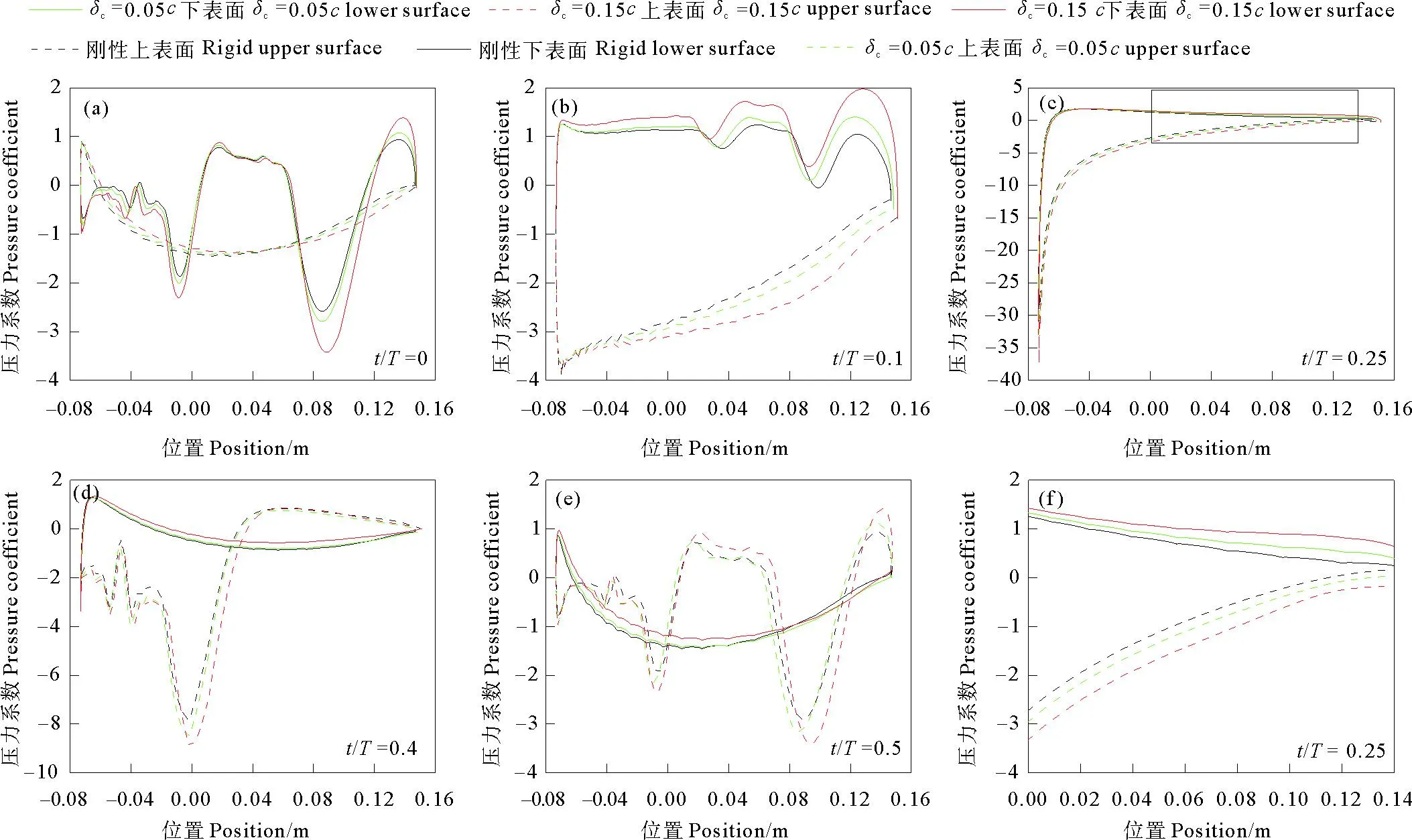
(由于图(c)中的压力系数变化范围较大,为进一步分析变形程度对水翼后缘压力的影响,截取框线1范围内水翼上下表面压力系数的放大图,局部放大图如图(f)所示。Due to the large range of pressure coefficient variation in Figure (c), in order to further analyze the influence of deformation on the pressure at the trailing edge of the hydrofoil, an enlarged view of the pressure coefficients on the upper and lower surfaces of the hydrofoil within the range of Box 1 was taken, and a locally enlarged view is shown in Figure (f).)
综合以上分析,可以得出结论:水翼发生弦向变形可以改变其振荡过程中漩涡的生成和脱落的位置,旋涡强度随着变形程度的增大而增大,从而导致上、下表面的压力分布情况发生变化。半个周期内,随着水翼变形程度的增大,漩涡强度增大,水翼上、下表面的压力差增大,升力系数随之增大,进而使水翼升沉运动过程中获得的能量得以增加。
3.3 变形程度对水翼获能效率的影响
图10为半个周期内不同变形程度下水翼的有效攻角的比较。从图10可以看出,在同一时刻下,具有弦向柔性的水翼的有效攻角随着偏移量的增大而增大。结合弦向变形水翼的有效攻角计算式(14)—(16)可以发现,在t/T=0和t/T=0.5时刻,不同变形程度水翼的尾缘偏移量均为0,即没有发生弦向变形,此时对于它们的俯仰角和有效攻角数值相等且均为0°;而在t/T=0.25时刻,俯仰角值达到最大,不同变形程度水翼的尾缘偏移量均达到最大,此时对于变形程度最大的水翼,其有效攻角也最大。
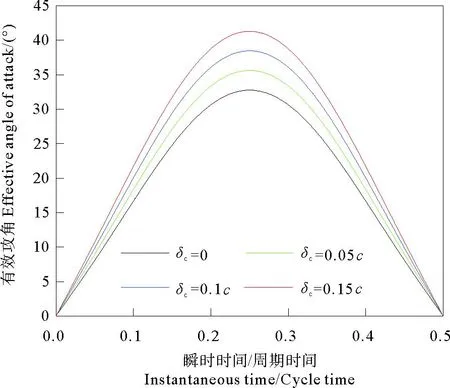
图10 不同变形程度下水翼的有效攻角
结合图7和10可以发现,具有弦向柔性的水翼,其升力系数、升沉运动功率系数和功率系数均随着水翼有效攻角的增大而增大。在t/T=0.25时,水翼的有效攻角达到最大,此时升沉运动功率系数也达到了峰值。这表明,在一定范围内,增大水翼的弦向变形可以增大其运动过程中的有效攻角,进而增加水翼的升力系数、升沉运动功率和功率系数,提高水翼的获能效率。不同变形程度下,变形水翼的升沉运动功率系数相对于刚性水翼的升沉运动功率系数的增量ΔCPl和变形水翼的总功率系数相对于刚性水翼的增量ΔCP计算式分别为:
ΔCPl=CPlx-CPl0,
(18)
ΔCP=CPx-CP0。
(19)
式中:CPlx和CPx分别为不同变形程度下水翼的升沉运动功率系数和总功率系数;CPl0和CP0分别为刚性水翼的升沉运动功率系数和总功率系数。
图11为不同变形程度下水翼升沉运动功率系数及总功率系数增量对比。从图11可以看出,半个周期内,水翼的变形程度越大,相对应的升沉运动功率系数增量和总功率系数增量整体上越大。结合图8和11可以看出,在靠近t/T=0和t/T=0.5时,由于水翼的尾缘偏移量趋近于0,因此不同变形程度下水翼的有效攻角趋于一致且均接近0°,尽管此时的漩涡作用增强,但升沉运动功率系数和功率系数的增量均趋近于0。在t/T=0.1时漩涡即将从水翼下表面脱离,而在t/T=0.25时水翼上表面前缘还未生成漩涡。因此,当t/T在0.1~0.25时,漩涡对提高水翼获能效率的作用还很小,而有效攻角随着变形程度的增大而增大。因此可以推断,水翼获能效率的提高主要是有效攻角增大引起的。
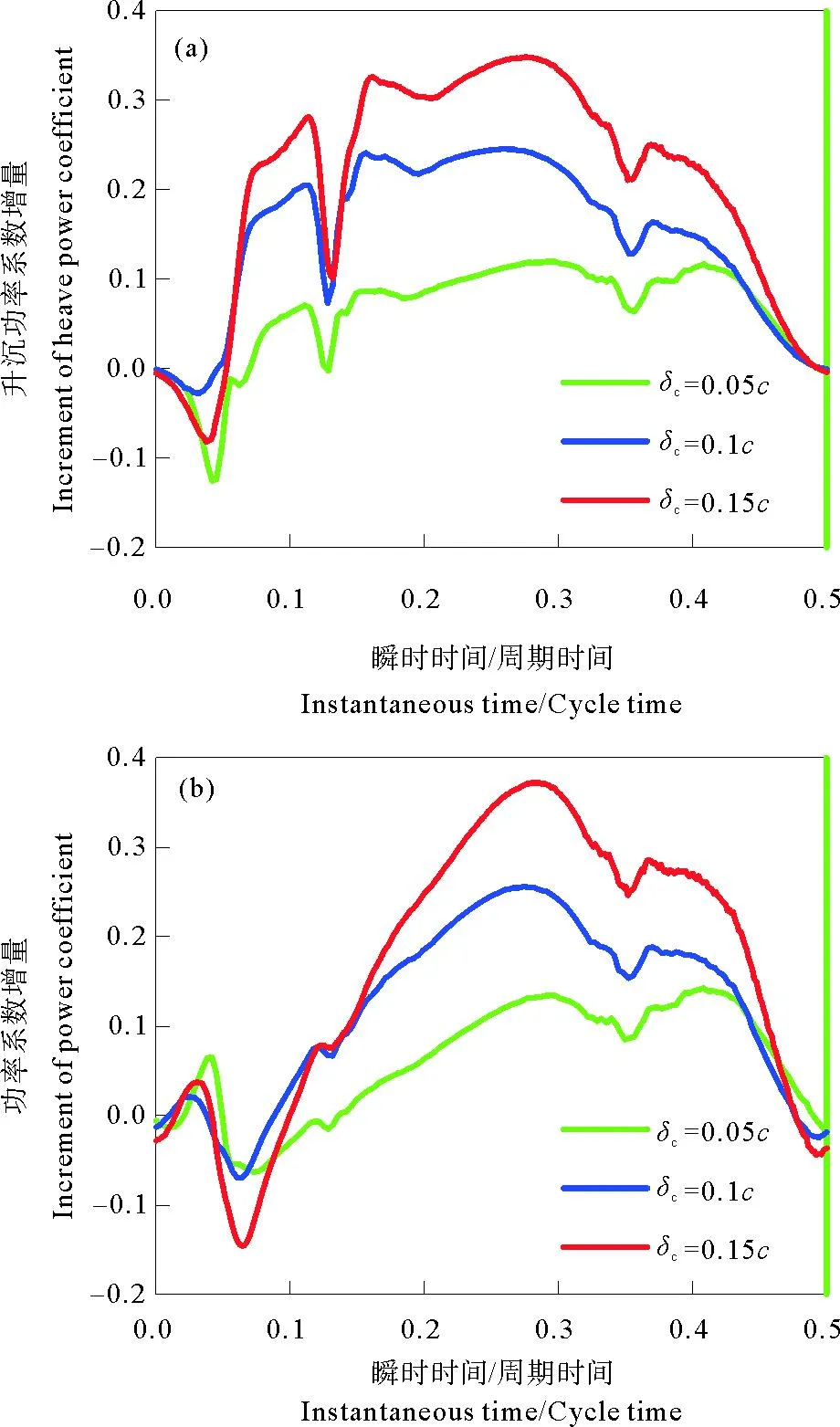
((a)升沉功率系数增量Incremental of heave power coefficient; (b)功率系数增量Incremental of power coefficient.)
综上分析可知,水翼弦向柔性变形导致获能效率提高的主要原因是水翼尾缘变形使运动过程中的有效攻角增大,进而增大了水翼的升力系数、升沉运动功率系数和功率系数,漩涡作用对效率提升也有一定影响,但总体影响较小。
4 结论
本文通过求解雷诺平均纳维-斯托克斯(RANS)方程,采用S-A湍流模型,对具有不同变形程度的振荡水翼获能过程进行数值模拟,从漩涡同水翼相互作用、弦向压力分布以及有效攻角等角度对水翼获能差异进行分析,探讨了水翼弦向主动变形提高获能效率的根本原因,主要结论如下:
(1)随着水翼弦向变形程度的增大,水翼的升力系数、力矩系数及功率系数均增大。其中,弦向变形程度最大的水翼相较于刚性水翼获能效率提高了约19.01%。
(2)漩涡作用对效率提升有一定影响,但总体影响较小。水翼发生弦向变形可以改变其振荡过程中漩涡生成和脱落的位置,旋涡强度随变形程度的增大而增大,从而导致上、下表面的压力分布情况发生变化。随着水翼变形程度的增大,漩涡强度增大,水翼上、下表面的压力差也增大,进而升力系数随之增大,从而提高了水翼的获能效率。
(3)在一定范围内,增加水翼的弦向变形能够增大其运动过程中的有效攻角,进而提高其升力系数、升沉运动功率系数和功率系数,从而提高水翼的获能效率。
猜你喜欢
海洋技术学报(2021年3期)2021-08-19
数字海洋与水下攻防(2020年5期)2021-01-04
宇航总体技术(2019年5期)2019-10-11
汽车观察(2018年10期)2018-11-06
北京航空航天大学学报(2017年7期)2017-11-24
中外文摘(2017年19期)2017-10-10
厦门理工学院学报(2016年1期)2016-12-01
中国卫生(2016年4期)2016-11-12
振动与冲击(2015年2期)2015-05-16
空气动力学学报(2015年3期)2015-04-14