
基于TRIZ与可拓创新方法的机械产品概念设计方法研究
2024-03-13 02:45熊宗慧曹东升胡平平何志琪
机床与液压 2024年3期
熊宗慧,曹东升,胡平平,何志琪
(新疆大学智能制造现代产业学院,新疆乌鲁木齐 830047)
0 前言
随着社会的进步以及个性化消费需求的不断增长,产品的竞争越来越激烈,新产品的开发面临着不断变化的需求、各种制约因素和充满活力的市场,这些因素对新产品的设计效率和创新提出了更高的要求。在产品设计的生命周期中,概念设计是最具创新性的阶段,包括了从客户需求信息的分析到新产品功能实现的所有过程,是产品创新思维形成的关键阶段,它已成为产品开发创新的核心环节,也是提高产品质量、降低成本和增强企业竞争力的主要手段[1]。其创新性和效率对于新产品的竞争性开发至关重要,而概念设计方法的应用很大程度上决定了概念设计的效率、质量和创新性。
在产品设计阶段常用的创新方法有公理化设计、TRIZ(Theory of Inventive Problem Solving)理论、质量功能布置理论,可拓创新方法(Extension Innovation Method)等。其中TRIZ理论以其良好的可操作性和实用性,自诞生以来一直广泛应用于工程技术领域,用于解决工程设计中的难题,能够有效提高创新速度。许多学者将TRIZ用于产品的概念设计阶段,用于形成创新设计方案。文献[2]将质量功能展开理论和TRIZ理论结合,提出一种系统化设计流程的建筑结构自动布局机器人概念设计。文献[3]应用TRIZ理论指导秸秆微粉碎机的概念设计,有效提高了秸秆微粉碎效率。文献[4]将遗传算法与TRIZ结合,解决设计目标之间存在的冲突。文献[5]将TRIZ与公理设计相结合,建立概念设计过程模型并对海草夹苗机械手进行概念创新设计。TRIZ在解决矛盾冲突问题以及方案上有得天独厚的优势。但是,在产品概念设计中产品需求获取以及方案评价方面,TRIZ工具仍存在分析难、具体化难和量化评价难的问题。可拓创新方法是中国原创的用于求解矛盾问题的理论,其特点为操作流程形式化、定性与定量相结合,可拓创新方法具有较强的分析问题和逻辑推理形式化能力,其中的优度评价法被广泛运用于各领域方案评价中。文献[6]把可拓方法应用于机械产品概念设计中,建立了可拓设计模型。文献[7]将可拓逻辑与共轭分析等方法应用于需求分析与配置规划中,解决了需求动态增长等问题。文献[8]将可拓优度评价法运用于定制类汽车产品概念设计方案的评价与决策中。文献[9]在可拓第三创造法的基础上融入了相关分析和衡量指标,细化了产品概念设计流程。文献[10-11]将可拓学与因果链、裁剪方法相结合,通过基元形式化表达,增强了设计方法的客观性。可拓理论具有较强的逻辑推理形式化能力,但是缺乏良好的产品原理解或方案的生成能力。
综上所述,本文作者在已有的研究基础上,将TRIZ与可拓创新方法各自的优势相结合运用于机械产品概念设计中,综合考虑可拓学形式化的模型和分析问题的优势,以及TRIZ工具解决冲突问题的能力,提出一种集成TRIZ与可拓创新方法的概念设计方法,以期为产品概念设计的智能化、快速化提供支持。
1 集成可拓与TRIZ的概念设计方法
1.1 需求分析与基元模型构建
用户需求是产品创新的驱动力,预期产品的设计需求往往是模糊的,因此分析用户需求并建立功能-约束模型是设计开发过程中的重要环节。可拓学具有形式化的模型和流程化的问题求解方法,规范了知识的形式和问题求解的步骤,具有严谨的科学性和严密的逻辑推理能力,适用于问题分析。可拓学中用三元组形式的基元模型B=(O,C,V) 来描述某对象O(物、动作或关系)具有特征C,且该特征对应量值为V,其优势在于形式化与定量化结合,能够定量定性地表现不同模型之间的关联性,因此可用于分析复杂问题。
例如描述清理污水管道的需求时可以用事元模型表述为
其中管道信息O1可以用物元表示为
利用可拓学基元形式化的模型,将客户提出的模糊需求转化为定性定量特征需求参数的基元模型,并通过对环境等其他因素的拓展分析找到背后隐藏的需求条件。
1.2 功能分析
根据产品需求基元模型,确定产品的总能,通过构建系统化、图形化的方式建立功能结构模型,将总功能按照复杂程度由高到低逐层进行分解,构建功能分解树,如图3所示。对总功能的分解,即是对功能不断细化的过程,细化到一定程度的子功能,使复杂抽象的设计问题具体化、层次化,在后续的结构映射过程中能够更容易求解。
根据约束基元模型与功能分解树完成子功能-结构的映射求解,再综合考虑各子结构间的影响关系,构建出原始设计结构。
1.3 冲突求解与方案生成
(1)冲突求解
在功能-结构的映射过程中,冲突是设计人员经常遇到的问题,如改进某一参数导致其他参数恶化、引入一个功能导致系统产生另一个有害功能等。而产品的概念设计核心就是解决冲突问题,在功能-结构映射过程中,如产生各类冲突问题,根据冲突类型利用TRIZ的冲突求解工具,快速获得该问题对应的发明原理或原理解。
(2)方案生成
在求解冲突问题时,从 TRIZ 方法中得到的原理解仅为方向性提示,发明原理具有很强的抽象性,转化为实际方案过程中需要设计人员拥有大量跨领域知识和跳跃性思维,因此无法直接使用。在可拓学中,创新方案生成的工具是可拓变换,根据拓展分析得到多个结构关系元,再结合相关知识和可拓变换,获取多种改进方案。因此可以利用可拓变换表达发明原理中所包含的实际变换操作,直接对具体零部件进行变换,降低 TRIZ原理解的转化难度。
1.4 方案评价与优选
在方案生成时,若只产生一个概念方案,则可直接选取;若产生多个方案,则需要综合考虑多属性情况来进行量化评价。概念设计方案往往具有具体信息模糊、量化评价难等特点。可拓关联函数用于刻画某元素拥有某特性的程度,已被广泛应用于优度决策评价,因此采用可拓优度评价法对概念方案进行评价决策,通过引入关联函数计算指标关联度,最终加权得到方案整体优度,在体现出方案整体优劣的同时体现单个指标对综合值的关联程度,进而为设计人员改进方案提供参考。优度评价具体流程如图1所示。

图1 优度评价流程
集成可拓学与TRIZ理论的概念设计流程,如图2所示。
2 应用案例
以污水管道清淤机器人的创新概念设计为例,验证文中所提方法的有效性。
随着城市现代化的发展,管道遍布于城市与工厂的每个角落,输送生活污水与地面雨水等,其通畅与否与人们的生活息息相关。随着地下管网建设得越来越多,管道清淤变成一项任务量巨大的任务。目前我国管道清淤工作一般采用人工配合高压水枪与吸污车进行清理,但这种方法对人工的需求较大,而且对于直径较小的支路管道很难适用[12]。因此,采用基于可拓与TRIZ的集成创新设计方法,设计一款针对中小管径的管道清淤机器人,实现对支路管道的清理工作。
2.1 构建需求基元进行需求分析
根据市场调研以及客户实际需要,运用第1.1节中需求基元建立方法,可以将初始用户需求用事元模型表示为
其中:M=
从初始需求事元模型可以看出,用户的核心需求是管道清理以及清理过程的自主运动。但初始用户的事元需求模型获取的信息过于简化,不利于接下来用户需求到产品功能的映射,因此有必要对初始需求基元进一步拓展分析,结合环境、约束条件、领域知识等,进行可拓共轭分析,将机器人设计需求基元按照虚Rim、实Rre、潜Rit、显Rap进行划分。
2.2 功能分解与冲突识别
通过对管道清淤机器人需求基元模型分析,将管道清淤机器人总功能分解为4个分功能:清淤功能、驱动功能、支撑功能、辅助功能:将这4个分功能再次进行分解,得到如图3所示的管道清淤机器人功能分解树,通过分析功能模型与约束得到两对技术冲突。

图3 功能分解图
冲突1:零件数量与稳定性
由功能分析可知,管道机器人需要行走稳定、一定的越障能力和变径功能。管道机器人针对的是管径较小的支路管道,管道形状复杂,管道机器人需要具备一定的管道适应能力,能顺利通过管道的过渡段和弯曲段甚至是竖直段。主动变径方式虽然能够在人为操控下适应管径的变化,但结构比较复杂,成本较高,因此在不影响正常功能的前提下选择结构相对简单的被动变径。常用的平行四边形被动变径方式在变径时前后端都会发生变换,即使只有一端受到压力另一端也会产生变化,在变径或遇到障碍时,会导致清淤机器人部分接触不到管壁,失去平衡,影响了机器人行进时的稳定性。
冲突2:管道清淤机器人尺寸与所需驱动力
清淤机器人工作管道管径较小,使得管道机器人的体积受到约束,无法选用体积较大的动力源来提供足够的驱动力,而清淤机器人在管道中的行进和清淤工作需要较大的驱动力和扭矩。
2.3 冲突求解与方案生成
(1)冲突求解
将上述冲突转化为TRIZ问题,选取对应的工程参数。冲突1欲改善的工程参数为36,设备复杂性;恶化的工程参数为13,稳定性;在冲突矩阵中查询工程参数36和13,得到4条发明原理。冲突2欲改善的工程参数为7,运动物体的体积;恶化的工程参数为10,力量;在冲突矩阵中查询工程参数7和10,得到4条发明原理,如表1所示,对应发明原理的描述如表2所示。
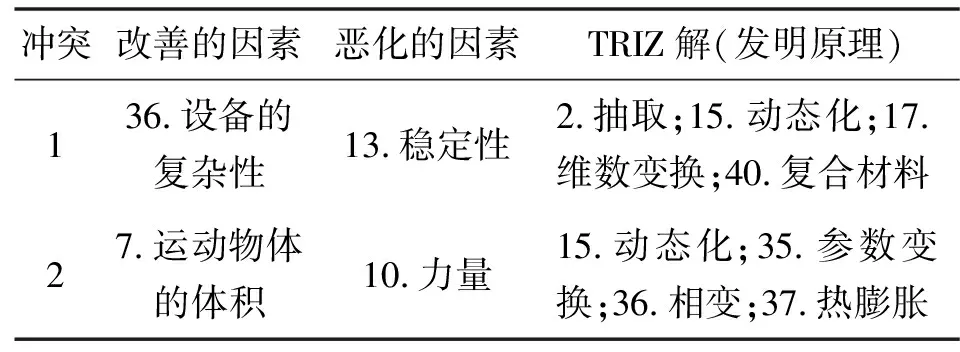
表1 冲突对应的TRIZ解

表2 对应的发明原理
(2)方案生成
上述发明原理皆为抽象性较高的启示性文字,将其转换为可以具体实施的原理解难度很高,因此对其包含的可拓变换进行抽取,建立基元表达模型后通过拓展变换生成具体的概念方案。
冲突1。根据初步对比分析,选择第二条发明原理,即抽取原理作为参考解来解决变径机构稳定性的问题,构建变径机构初始物元模型:
对物元M1进行分解变换T1M1={M11⊕M12}
其中M11与M12的关系元R1为
对M12进行置换变换T2M12=M′12
两个曲柄滑块的关系元为
T2M2=M1⊕M′2
得到变径机构概念方案:

即将平行四边形变径机构改为两个独立的曲柄滑块机构,增加两个轴线方向的滑块,并在两个机构中间增加加固体环,由弹簧连接固定环与滑块,提供轮子足够的支撑力。当前、后两端有一端单独受力时,可以实现一端变径而另一端不受影响依然紧贴管壁平稳前进。
冲突2。经比较选取第15条发明原理,即动态化原理作为参考解,求解缩小机器人体积与增强驱动力的冲突问题。首先构建管道机器人物元模型:
依据动态性原理对物元模型进行分解变换,获得可实现功能的关键部件物元。

根据冲突问题在缩小管道机器人体积的同时,使管道机器人具有较强的驱动力和清淤能力,对实现相应功能的部件物元模型实施复合变换中的补亏变换[13],形成新的部件物元:
T3M31=M31⊕M33=

T4M41=M41⊕M43=
T5M42=M41⊕M42=
得到新的关系元:
将变换得到物元模型进行结合获得创新方案集,首先考虑约束条件的限制进行初步筛选,拟得到两种可行的解决方案。
方案一:采用高压水流与弹性簧片清淤盘结合的清淤装置,减小清淤所需的驱动力,在机器后面使用万向节与螺旋轮驱动装置连接,通过螺旋驱动与支撑轮组结合的移动方式带动清淤装置的转动与推进。
方案二:采用螺旋搅拌装置与活塞式清淤泵吸入的方式清淤,从而实现动力源的分解,通过3组支撑腿内置驱动轮行进,将气动马达固定在支撑腿内部,保护驱动并节省空间。
2.4 方案评价
(1)确定衡量指标
根据管道清淤机器人设计需求基元,从清淤能力方面考虑,选取功能性c1作为评价特征;从工作环境方面考虑,将可靠性c2作为评价特性;从经济方面考虑,选取生产成本c3作为衡量指标。于是得到3个一级衡量指标C={c1,c2,c3} 。
(2)确定权系数
采用AHP(Analytic Hierarchy Process)法获取各指标权重,邀请企业设计人员,相关从业人员和高校相关研究人员三类专家填写调查问卷,采用互反性1~9标度法,对指标的相对重要程度进行打分,并构造判断矩阵。上述一级指标的判断矩阵H为
求得各指标权系数:
ω={0.405 90,0.224 85,0.369 24}
(3)计算关联度
将评价参数分为优秀、良好、一般、较差四类,取值区间分别为优秀[90,100] 、良好[80,89]、一般[70,79]、较差[60,69],构造关联函数:
k(x)=
(1)
将上述专家对方案的评分取平均值,根据式(1)计算各指标与各等级的综合关联度,结果如表3所示。

表3 各方案关联度计算结果
(4)计算方案优度
运用关联函数加权运算等级j的综合关联度K(N)也就是优度,方案综合优度越高,则说明该设计方案更加符合要求。计算公式为
(2)
根据式(2)计算得到两套方案的综合优度分别为
K(N1)=ωk(x)=0.37,K(N2)=ωk(x)=0.26
可以看出方案一的综合优度更高,因此选择方案一作为最优方案。此方案采取两个弹性连接的曲柄滑块装置,具体实际方案如图4(a)所示,在保持较小体积的同时,提高了管道机器人变径时的稳定性。清淤装置采取推进-刮削-清洗过滤的组合清淤方式,具体方案如图4 (b)所示。

图4 管道清淤机器人三维模型
整机采用螺旋轮式与支撑轮相结合的方式,提供旋转前进所需的驱动力,在保持较小体积的同时将动力源进行分解和合理分布,提供足够的驱动力,具体方案如图4(c)所示。
3 结语
文中提出一种集成TRIZ与可拓创新方法的产品概念设计方法,将可拓理论与TRIZ理论的优势相结合,解决机械产品概念设计不同阶段的矛盾问题。首先通过用户需求基元模型与共轭分析,形式化地表示需求以及约束条件,确定产品的功能与矛盾问题;运用TRIZ理论提取工程参数查询对应的原理解,通过可拓变换生成多种概念方案;最后利用优度评价法对方案进行量化评价,选取最优方案。规范了概念设计流程,使概念设计过程更加高效、便捷。运用该方法对小型管道清淤机器人进行创新设计,得到了较为理想的解决方案,验证了该方法的可行性与有效性,该方法同样适用于其他产品的创新设计。
集成TRIZ与可拓创新方法的概念设计方法可以提升概念设计过程的规范性和效率,但在冲突求解过程中仍依赖人工,故在文中研究的基础上,利用可拓模型形式化的优点,结合计算机智能化求解概念设计矛盾问题将是后续研究重点。
猜你喜欢
高中数理化(2023年6期)2023-08-26
建材发展导向(2022年20期)2022-11-03
湖南林业科技(2021年3期)2021-12-02
——拟合优度检验与SAS实现
四川精神卫生(2021年5期)2021-11-04
建材发展导向(2021年7期)2021-07-16
文艺生活(艺术中国)(2018年11期)2019-01-03
科学导报(2018年30期)2018-05-14
工业设计(2016年11期)2016-04-16
当代化工研究(2016年6期)2016-03-20
科技与管理(2014年4期)2014-12-31
