
ADAS横向控制功能人机共驾的标定思路及方法
2024-03-13 06:41黄桥
汽车与驾驶维修(维修版) 2024年2期
黄桥
(东风柳州汽车有限公司,柳州 545001)
0 引言
高级辅助驾驶系统(Advanced Driver Assistance Systems,ADAS)是通过汽车上各类传感器结合导航仪地图数据进行系统运算及分析的主动安全功能集成控制系统。该系统能给驾驶者预警可能发生的危险,需要时还能直接控制车辆。
横向控制模块是ADAS中的重要组成部分之一,主要是通过控制方向盘转角使汽车沿着期望的既定路线前行。而电控转向系统(EPS)则是横向控制的执行机构。怎样更好地集成ADAS和EPS的功能,在提升ADAS横向控制功能的同时,让驾驶员操作有良好的转向体验,是必须关注的问题之一。
本文通过分析应用扭矩系数进行ADAS横向控制的功能标定,提出在手力介入时控制EPS对ADAS响应衰减的横向控制功能标定思路,通过实车验证了策略的有效性,实现手力介入时以驾驶员操作为主的功能表现[1-2]。
1 驾驶辅助技术概述
1.1 驾驶辅助技术发展历程
在智能汽车不断发展突破的过程中,ADAS系统起到了关键作用。该系统在汽车行驶过程中为驾驶员提供辅助支持,能优化驾驶员的驾驶行为,协助驾驶员进行部分操作,带来更安全、舒适、便捷高效的行车体验。随着以用户为导向的产品开发理念越来越被汽车厂家采用,驾驶辅助系统在提升汽车产品力和用户友好度上作用明显。因此驾驶辅助系统技术必然是以量产为基础,以用户为导向不断发展[3]。
1.2 驾驶辅助技术发展意义
随着科技进步,驾驶辅助技术也越来越成熟,会更加受消费者重视。现如今,国家大力号召使用新能源汽车,相关政策的完善更加促进了新能源汽车的发展。未来,新能源汽车不断发展的同时,也将促进驾驶辅助技术飞速发展。
2 ADAS横向控制
2.1 ADAS横向控制功能及原理
横向控制模块在驾驶辅助中发挥着重要作用,主要体现在以下几个方面。
(1)转向控制:ADAS通过感知并分析车辆周边环境和驾驶员的操作意图,可以实现对车辆转向的精准控制,有效提高车辆的横向稳定性和平顺性。
(2)车辆姿态控制:ADAS可以通过对车辆姿态的实时监测和控制,减小车辆在高速行驶或紧急避险时的侧滑风险,提高了车辆的横向稳定性和安全性。
(3)车辆自动控制:在特定场景下,更高级的ADAS能实现车辆的自动驾驶,包括车道保持、自动换道等功能,能极大提升驾驶舒适性和便利性。
ADAS横向控制系统可分为感知层、决策控制层和执行控制层3个部分。其中,感知层用于采集车道信息和车辆信息;决策控制层即车道保持辅助控制器;执行层为EPS系统[4]。
2.2 基于扭矩方案的ADAS横向控制
在扭矩方案中,ADAS的请求与驾驶员操作的手助力都是与扭矩相关的作用量,EPS会通过内部算法对ADAS的扭矩请求及驾驶员操作的手助力扭矩进行处理。当驾驶员操作手力介入时,可通过查询手力数据表格针对不同的手力矩去衰减助力请求(通过查表,将不同扭矩下的手力系数乘到ADAS的计算扭矩请求,即可作为最终输出扭矩)。因此,寻找到合适的匹配关系和衰减策略是扭矩方案的关键,接下来将提出手力介入时控制EPS对ADAS响应衰减的横向控制功能标定思路。
3 基于扭矩方案的ADAS横向控制功能标定思路
3.1 扭矩方案概述
扭矩方案是指在车辆横向运动控制中,通过对车轮施加不同的扭矩来实现横向稳定性控制的一种方案。它是基于车辆动力学特性和横向控制系统的建模分析,通过对车辆横向运动过程中的扭矩分配进行优化调整,来实现对车辆横向运动的精准控制。
3.2 扭矩方案在车辆横向控制中的应用
扭矩方案在车辆横向控制中具有广泛应用,包括但不限于车辆动态稳定控制、横向稳定性增强和横向操控性能提升等方面。在车辆的动态稳定控制中,扭矩方案可以通过对车辆的扭矩分配来实现对车辆侧滑角和横摆角的控制,从而提高车辆的稳定性和操控性能。在紧急避险和急转弯等特殊情况下,扭矩方案可以快速响应并实现对车辆横向运动的精准控制,有效提高车辆的安全性和稳定性。
3.3 扭矩系数信号的作用
扭矩系数(Torquefactor)信号如下表1所示。可以看出,扭矩系数的值为0~1。其中,“0”代表EPS不响应ADAS的请求;“1”代表EPS肯定100%响应ADAS的请求;中间值如“0.5”,代表EPS响应ADAS电流的50%(Torquefactor 值乘以ADAS请求的助力电流)。

表1 系数扭矩信号表
为保证在一定的扭矩系数范围内,EPS仍能全力响应ADAS的请求,一般要求扭矩系数值大于0.7 时,需保留EPS 的积分环节,以保证最终响应到ADAS的请求值;要求扭矩系数值小于0.7时,需消除EPS的积分环节,以保证起到响应的衰减作用。
基于以上分析,将扭矩系数信号应用到横向控制的功能标定中,能更好地平衡ADAS横向控制的请求与EPS响应,得到更好的ADAS横向控制功能体验。
3.4 应用扭矩系数信号的标定思路
如何在手力介入时衰减EPS对ADAS的响应,本文提出两步衰减的方法,以实现手力介入时以驾驶员操作为主的功能体验。
3.4.1 减小ADAS的响应
通过设置扭矩系数值(TF 值),根据TF值的变化,控制EPS进行相匹配的响应衰减,就能在不同工况下更好地平衡ADAS横向控制的请求与EPS 的响应,从而实现更好的转向体验。
3.4.1.1 TF上升、下降阈值,基于弯道半径进行差值
因为驾驶车辆在弯道中时,方向盘会随车辆过弯转动。此时驾驶员手扶在方向盘上,对方向盘的阻力较直线行驶时更大,因此衰减的阈值应该随弯道变化。考虑到弯道影响,拟定曲率半径与手力上升、下降阈值关系如表2所示。
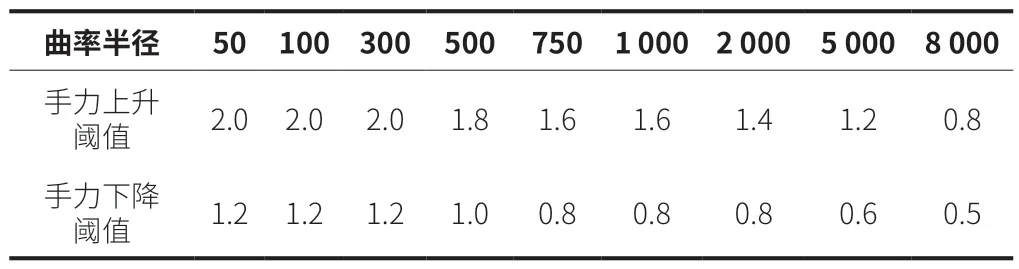
表2 曲率半径与手力上升、下降阈值关系
3.4.1.2 TF值变化特质
TF 值上升、下降到何值合适,可以分为以下几种情况。
(1)车道偏离预防(Lane Departure Prevention,LDP)功能激活时,TF上升到某一值(可基于实际情况做标定,在此设为0.4)后,在该值(0.4)的基础上进行纠偏。LDP激活时,TF 以一定的斜率上升到该值(0.4),之后不再考虑手力维持该值(0.4)直到功能退出。
(2)在车道居中控制(Lane Keeping Support,LKS)时,需要EPS完全响应ADAS的角度请求,只有在手力介入时,EPS减小相应控制积分。因此在LKS功能下,当驾驶员介入时,可采用手力衰减的形式衰减到某一阈值(可基于实际情况做标定,在此设为0.4),当手力低于某一值再进行恢复。
(3)EPS对于不同车速段的助力系数不同,在低车速下助力较为强一些,高车速的助力相对较弱。因此在驾驶员介入人机共驾,TF下降至手力矩系数中间值(TFSlopeChange)进行控制时,需要TFSlopeChange 进行基于速度的补偿。
LKS功能下TF 曲线变化如图1所示。
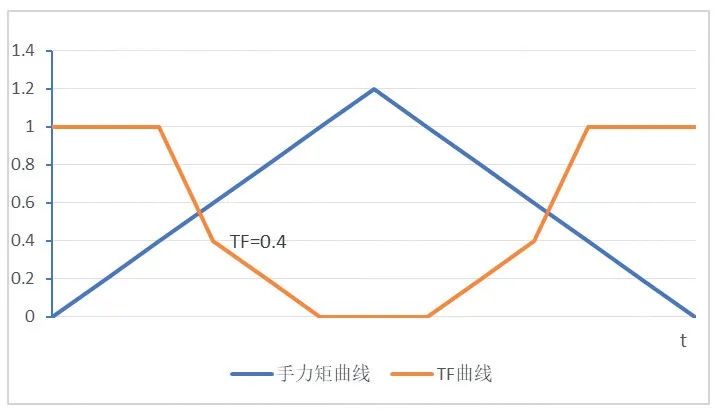
图1 LKS功能下TF曲线变化
3.4.2 减小请求角度
3.4.2.1 基于手力矩判断衰减请求
基于手力矩衰减后,请求角度趋近于0,手力矩作用下方向盘角度变大,会出现方向盘越拉越硬的感觉。引入基于角度差值的补偿后,对小角度拉偏的工况有所改善。
3.4.2.2 基于手力矩及请求转角与实际转角偏差做计算
如果|ADAS_AngleControl-EPS_SteerWheelAngle|<AngleMax
则输出:ADAS_AngleReq=ADAS_AngleControl
当:|ADAS_AngleControl-EPS_SteerWheelAngle|>AngleMax
则输出:ADAS_AngleReq=EPS_SteerWheelAngle+AngleMax当:EPS_SteerWheelAngle-ADAS_AngleControl>AngleMax
则输出:ADAS_AngleReq=EPS_SteerWheelAngle-AngleMax
TF 的衰减阈值存在弯道补偿。因此在弯道中,如果驾驶员拉动方向盘时需要一个相对大的力矩(通常在2 N·m左右),在进行角度补偿时,需要根据曲率半径采取不同的补偿值,以减小弯道中手感的差异。同理,TF 上升阈值一样,基于弯道角度补偿计算介入的手力矩也需要基于弯道进行调整。
3.4.2.3 车辆跟停摆动问题
在车辆跟停时,前车会遮挡部分车道线,导致驾驶辅助系统识别车道线发生跳变,容易出现方向盘摆动的问题。在低于一定车速(TFReduceVehspd)时,TF以一定斜率下降到0,此时EPS不再响应ADAS的角度请求;当车速高于一定阈值时,TF先以一段较小的斜率上升到TFSlopeChange之后,再以较大的斜率上升到1,让EPS 完全响应ADAS的角度请求。
3.5 标定思路示意图
基于扭矩方案ADAS横向控制功能标定思路如图2所示。
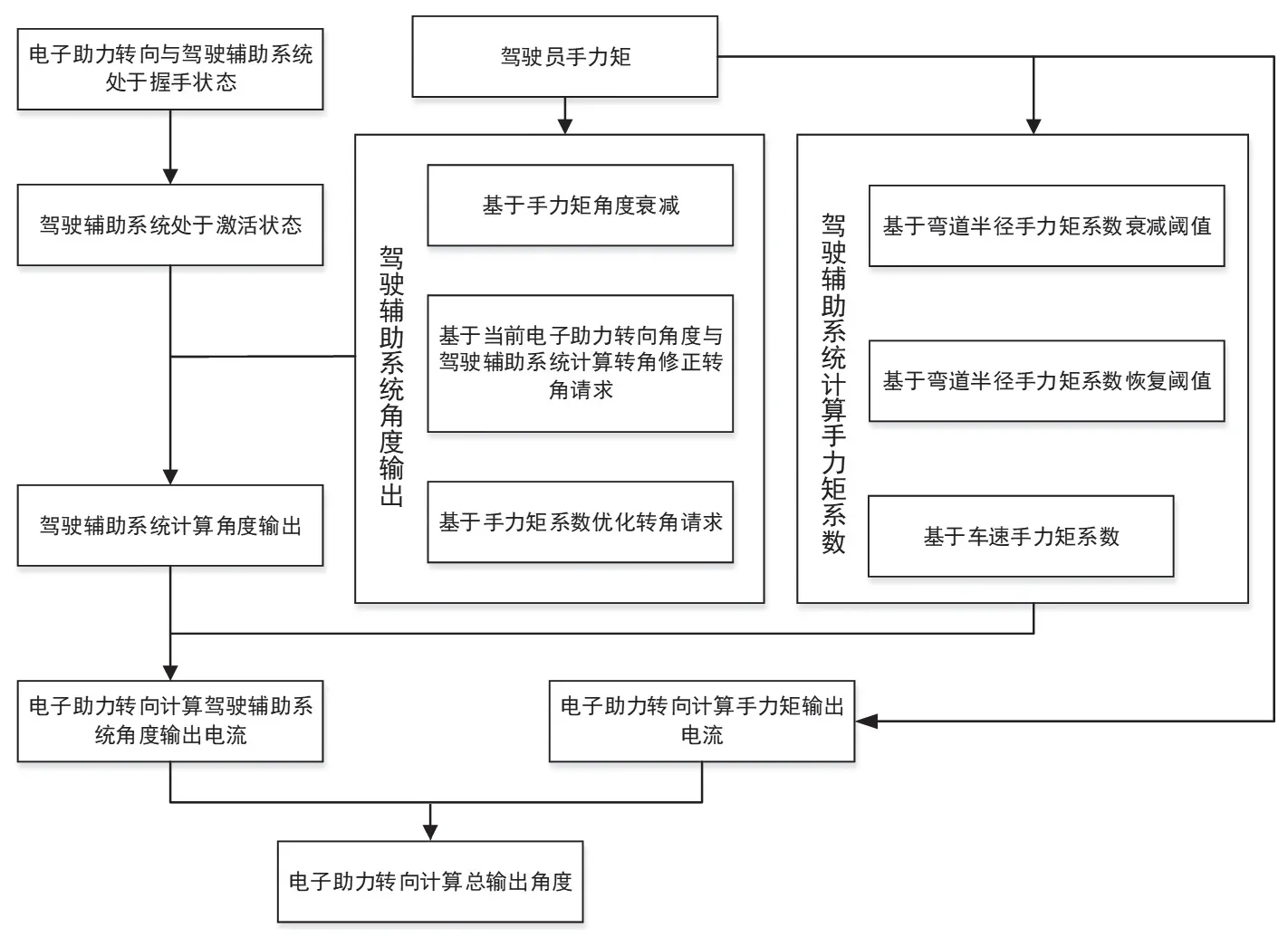
图2 基于扭矩方案的ADAS横向控制功能标定思路示意图
4 ADAS横向控制功能标定方法
4.1 功能标定流程概述
在整车开发过程中,开展标定工作前应利用ADAS测试用例对各执行器进行测试,确认各执行器系统性能是否满足ADAS要求。通常,ADAS标定先标定横向或纵向功能,最后再进行自动紧急制动系统(AEB)标定和场地测试[5]。
4.2 标定结果验证与分析
在ADAS横向控制功能标定完成后,需要对标定结果进行验证与分析。在该环节中,需要进行一系列道路试验,验证标定参数的有效性和稳定性。同时,还需要对标定数据进行详细的分析,包括频域分析、时域分析和灵敏度分析等,以评估标定结果的准确性和可靠性。通过验证与分析,可以及时发现标定结果可能存在的问题和不足,并提出改进方案和优化策略,从而进一步提高ADAS横向控制功能的性能和稳定性。
5 ADAS横向控制功能标定试验与结果分析
5.1 标定试验设计与方案
在进行ADAS横向控制功能的标定试验前,需要设计合理的试验方案,确保试验能够全面、准确地反映出车辆的横向控制性能。试验设计主要包括选择标定道路、确定标定参数、设定标定速度等内容。
在选择标定道路时,需考虑道路的平整度、路况、车流情况以及环境因素,以保证试验过程中的安全性和可靠性。确定标定参数时,应充分考虑车辆的动力学特性、横向控制系统的特点,以及实际道路行驶情况,确保所选参数具有代表性和可操作性。
5.2 标定试验数据采集及分析
在进行标定试验时,需要通过专业的数据采集设备对车辆的横向控制性能参数进行实时监测和记录。在数据采集完成后,需要对试验数据进行详细分析,包括数据清洗、处理和提取,以获取有效的标定参数。此外,还需要利用统计分析方法对试验数据进行分析,探索数据之间的相关性和规律性,为后续的标定结果提供依据。应用扭矩系数信号进行标定试验的数据分析如图3 所示。

图3 应用扭矩系数信号进行标定试验的数据分析
5.3 标定结果与相关参数优化
通过对标定试验数据分析,可获得车辆横向控制功能标定结果和相关参数。标定结果将包括横向控制系统的稳定性、响应速度和误差补偿能力等方面的参数值。然后,需要对这些参数进行进一步的优化,以提高车辆的横向控制性能。最终得到的标定结果能够有效地指导ADAS横向控制功能,为车辆行驶提供更加安全、舒适的保障[6]。
6 结束语
通过应用扭矩系数信号,明显减少了横向控制功能激活或退出时,出现的方向盘快速转动的打手问题,提高了ADAS横向控制功能激活时驾驶员介入的转向体验。在开展横向控制功能标定工作时,可结合本文提出的标定思路,能较好地实现手力介入时以驾驶员操作为主的横向控制功能表现。
猜你喜欢
客车技术与研究(2023年6期)2023-12-19
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
中国煤层气(2021年5期)2021-03-02
汽车维修与保养(2020年11期)2020-06-09
凿岩机械气动工具(2017年3期)2017-11-22
中国惯性技术学报(2017年1期)2017-06-09
光学精密工程(2016年3期)2016-11-07
公民与法治(2016年4期)2016-05-17
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
