
基于时序向量相似性的空间目标群匹配技术研究
2024-03-14 08:37张学文于兴伟侯鑫宇姚云鹏范光明
网络安全与数据管理 2024年2期
张学文,于兴伟,侯鑫宇,姚云鹏,范光明
(解放军95921部队,山东 济南 250000)
0 引言
近年来,全球范围内掀起了低轨互联网星座建设的浪潮,随着“星链(Starlink)”“一网(OneWeb)”等多个卫星星座系统成功入轨,人们对空间低轨资源使用[1]、低轨巨型星座高效管理[2]等领域产生了极大关注。低轨巨型星座的快速发展,导致低轨空间目标数量的迅猛增长,不仅为航天器在轨运行、载人航天等活动带来巨大风险[3],也为空间目标编目管理提出了更高的要求。同时,星链等低轨星座形成的对地观测、定位、通信、控制等体系能力,对相关工作中侦察、判断、决策等方面产生深刻影响[4-5]。
由于“星链”等低轨巨型星座发射频次高、卫星规模庞大,采用一箭多星方式的发射入轨[6-7],入轨初期卫星以集群方式运行在低地球轨道,过境地基雷达视场时通常呈现为复杂目标群形式。群内各目标在一段时间内保持空间相对位置固定、速度相似的特点,造成目标间相互遮挡干扰地基雷达对目标群的完整观测。入轨后,“星链”等卫星在星载电推力器作用下,将运行轨道抬升至目标轨道,卫星目标群在电推力的作用下逐渐散开。由于电推力较小,仅为化学推力的几千分之一,其对卫星运行轨道影响难以准确估计,使得不同地基雷达群目标监测数据难以相互匹配,影响了编目定轨的时效性。
为提高对“星链”等低轨巨型星座的编目管理能力,实现对空间集群目标的运行状态的精准掌握,本文针对地基雷达群目标监测数据匹配识别开展深入研究。与群目标提取算法不同,地基雷达群目标监测数据匹配时,由于监测时刻不同,其目标运行态势相差较大,难以通过目标监测数据相似性实现目标群匹配。目前,针对飞机或舰船编队群目标的关联算法研究已有很多[8-9],卫星等空间目标运行速度较快,在集群飞行时难以匹配[10-11]。空间群目标关联匹配算法一般可采用联合概率数据关联、多假设跟踪等算法[12],针对地基雷达监测空间群目标过程中匹配识别困难的问题,本文使用空间群目标之间的相对构型开展数据匹配,首先将不同地基雷达的空间群目标监测数据转化为时序向量,再通过计算群目标空间构型将高维时序向量降维,最后选择空间构型相似性匹配算法,实现空间目标群匹配。
目前,对时间序列相似性计算的主要方法有动态时间规整、傅里叶变换、离散小波变换、分段累积近似法、符号化表示法和分段线性表示法等方法[13-14]。这些方法主要基于数据系列中点之间的对应关系,计算两条时间序列的相似性。其中动态时间规整算法(Dynamic Time Warping,DTW)在不等长时间序列相似计算上具备较好的效果,应用于卫星时间序列异常检测[15]、数据筛选等领域。本文选取DTW算法来计算空间目标群构型的相似性,完成空间目标群匹配识别。DTW算法是一种经典语音识别算法[16],通过动态规划衡量时序向量之间的相似程度,并给出目标匹配结果,可以很好地应用于不等长时间序列的匹配识别,可有效解决非完整空间群目标匹配问题,提升地基雷达网对低轨巨型星座的编目管理能力。
1 空间群目标时序向量
空间目标雷达监测数据通常为雷达可见弧段内目标相对雷达位置的距离、方位、俯仰时间序列,仅与空间目标运行的轨道相关。假设包含n个目标的空间目标群序列为TarGroup:{Tar1,Tar2,…,Tarn},则空间目标群时序向量为S={S1,S2,…,Sn},Si为群内目标雷达测量数据,可表示为Si={ρi1,ρi2,…,ρiN},其中,i为目标编号,N为监测数据点数,ρ={t,R,A,E}为距离方位俯仰测量数据。
1.1 坐标转换
为便于后续空间目标群监测数据匹配,在相似性度量计算前,需将测站球坐标系下的距离、方位、俯仰时间序列数据转化至同一测量坐标系。本文选择地心地固坐标系(Earth Center Earth Fixed,ECEF)作为监测数据相似性度量基本参考系,测站地理位置为O(L,B,H),其ECEF坐标系下测站位置坐标OR(xRE,yRE,zRE)如下:
(1)
其中,N为卯酉圈半径,e为地球第一偏心率,则测站观测数据坐标转化公式如下:
(2)
其中,[xr,yr,zr]T为ECEF坐标系下目标位置坐标,T为坐标转换矩阵:
(3)
空间群目标监测数据在ECEF坐标系下的时序向量可表示为Si={pi1,pi2,…,piN},其中p={t,X,Y,Z}为ECEF坐标系下的坐标数据。
1.2 时序向量降维
在地基雷达监测空间目标群时,群内目标由于姿态、位置等差异,捕获的航迹点数也不同,导致空间目标群监测数据为不规则多维时序向量。为便于开展空间目标群时序向量相似度计算,需将不规则多维时序向量进行降维。
本文采用拉格朗日五阶插值法,将群内目标监测数据拟合至同一时刻T0,计算T0时刻下群内各目标位置矢量ρ=(xi,yi,zi),进而获取群目标相对空间构型角度序列Q={φ1,φ2,…,φn}。
2 动态时间规整算法
2.1 算法简介
DTW算法采用最近距离原则,构建不等长时间序列之间对应关系,评估时间序列的相似程度。该算法在上世纪60年代由日本学者板仓(Itakura)提出[17],主要应用于语音识别、手势识别等领域,其识别效果稳定,鲁棒性好。在Berndt和Clifford的推广下,DTW算法拓展至不等长时间序列相似度计算,在航天领域已成功应用于密集目标轨迹识别、基于电磁特性目标识别和火箭尾喷焰识别等方面,均取得了很好的效果[18-21]。
2.2 算法原理[21]
设两时间序列Q1={φ11,φ12,…,φ1m}和Q2={φ21,φ22,…,φ2n,其长度分别为m和n。首先,构建n×m的距离矩阵M,距离矩阵M表示时间序列之间的局部距离,表示为M(i,j)=d(φ1i,φ2j)。其中,d(φ1i,φ2j)表示φ1i与φ2j之间的局部距离,局部距离为每个对应相同时间数据点的欧式距离之和,可表征任意两时间点之间的距离。
其次,计算规整路径向量W:
W=(ω1,…,ωt,…,ωT),ωt=d(φ1i,φ2j)
其中ωt是W上的第t个元素,表示φ1i与φ2j建立的对应关系,W的长度p满足max(n,m)≤p≤n+m-1。
(4)
最后,确定DTW下界距离。
为提高算法整体计算效率,降低计算复杂度,提高对空间目标的匹配识别时效性[13],可以使用边界过滤的方法。在计算时间序列DTW距离前确定上边界(Upper Boundary,UB)和下边界(Low Boundary,LB),当其不满足事先设定阈值时,直接判定两时间序列不相似,若满足阈值要求,则计算两条时间序列间DTW距离判断其相似度。
以时间序列Y=(y1,…,yj,…,ym)为例,根据时间序列数据特征构造两个新序列U和L,构造函数如下:
(5)
其中,U和L为时间序列Y的DTW上边界和下边界,r为规整范围,一般为常数或为i和j的函数,γ为调整参数(空间群目标在轨运行过程中,在推力的作用下机动变轨,其相对空间构型逐渐展开,使群内目标之间的空间几何关系随时间发生变化,该参数主要用于抵消由空间目标群展开带来的影响),U和L与时间序列Y关系如图1所示。

图1 时间序列Y和其DTW上下边界序列U、L
2.3 算法优点
DTW算法具有如下优点:
(1)DTW算法在计算不等长时间序列匹配方面应用效果很好。空间群目标时序向量经降维获取相对空间构型角度序列,其本质是一种不等长时间序列,可以采用DTW算法进行相似度计算。
(2)DTW算法本质上是采用模糊匹配模式对不等长时间序列进行伸缩变换规整,保留了数据的完整性。
(3)DTW算法计算简单、时效性好,可以快速完成大批量空间目标群观测数据的识别匹配工作,保障空间目标群的实时识别管理。
3 基于DTW的空间目标群匹配
目标群相对空间构型角度序列Q随着时间的推移逐渐展开,其本质是一种时间序列。受观测条件、卫星姿态等因素限制,通常不同地基雷达监测捕获空间群目标数量存在差别,因此对空间目标群监测数据匹配可简化为不等长时间序列相似匹配问题。
3.1 匹配识别流程
本文采用基于DTW的空间目标群匹配算法,对地基雷达空间目标群监测数据进行匹配,处理步骤如下。算法实现流程如图2所示。

图2 基于DTW的空间目标群匹配算法实现流程
(1)地基雷达群目标监测数据预处理
当雷达监测获取新空间目标群后,通过数据平滑、坐标转换、降维计算等预处理算法,将目标群时序向量转化为相对空间构型时间序列Q。
(2)基于DTW算法的空间目标群相似性计算
计算空间目标群构型序列Q与已知空间目标群之间的相似性,主要根据序列之间的观测时间差和DTW距离进行计算。
(3)更新空间目标群观测数据
对相似性计算结果进行排序,将地基雷达观测数据更新至最符合条件的空间目标群数据库中。
3.2 基于DTW算法的空间目标群相似性计算
将预处理后的目标群空间构型Q与空间目标群数据库内已知目标群Si进行匹配识别计算,获取已知目标群Si与Q之间的DTW距离,再根据目标群数据的时间差分配权重进行相似度计算。
首先,遍历计算目标群序列Si与Q全部对应格点,形成局部距离矩阵,局部距离计算如式(4)所示。根据局部距离最小原则找到两个序列之间的对应关系,如图3所示。

图3 时间序列Si与Q之间的对应关系
其次,确定数据序列之间的对应关系后,结合目标群序列的连续性、单调性以及对应关系,计算获取最优路径。从起始位置(0,0)对数据序列Si与Q进行匹配,每一个格点(i,j)的路径存在三个方向,即(i+1,j),(i,j+1)或者(i+1,j+1),选取其中局部距离最小值方向为最优路径方向,直到终点(n,m),如图4所示。
最优匹配路径确定后,累加路径上完成匹配格点的局部距离,累积距离即为两个序列Si与Q之间的DTW距离。
最后,相似性度量计算。根据序列Si与Q的时间差,对两个序列之间的DTW距离进行加权计算,公式如下:
Psimilar=λ·Δt·disDTW
(6)
其中λ为动态时间修正因子,Δt为序列之间时间差,disDTW为序列之间DTW距离。
采用DTW算法开展空间目标群相似性计算伪代码如下:
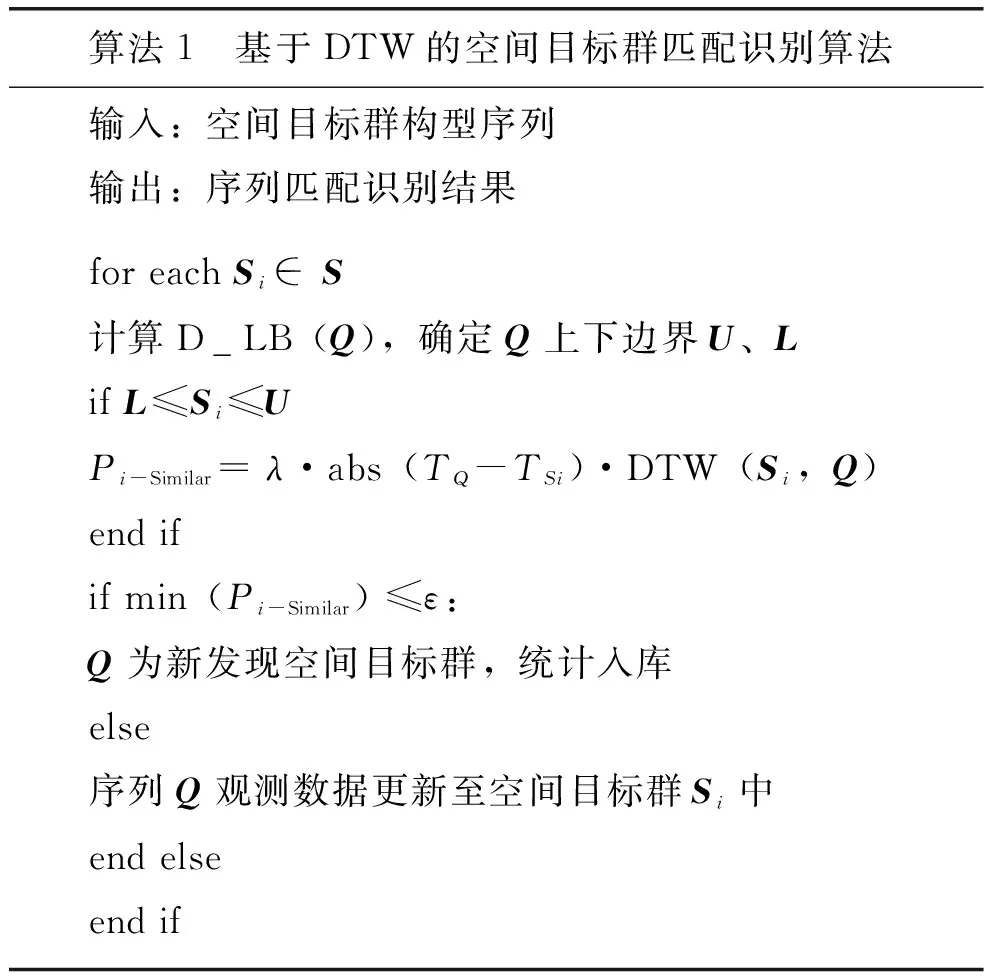
算法1 基于DTW的空间目标群匹配识别算法 输入:空间目标群构型序列输出:序列匹配识别结果 for each Si ∈ S计算D_LB(Q),确定Q上下边界U、Lif L≤Si≤UPi-Similar = λ·abs(TQ-TSi)·DTW(Si,Q)end ifif min(Pi-Similar) ≤ε:Q为新发现空间目标群,统计入库else序列Q观测数据更新至空间目标群Si中end elseend if
其中部分符号的含义如表1所示。
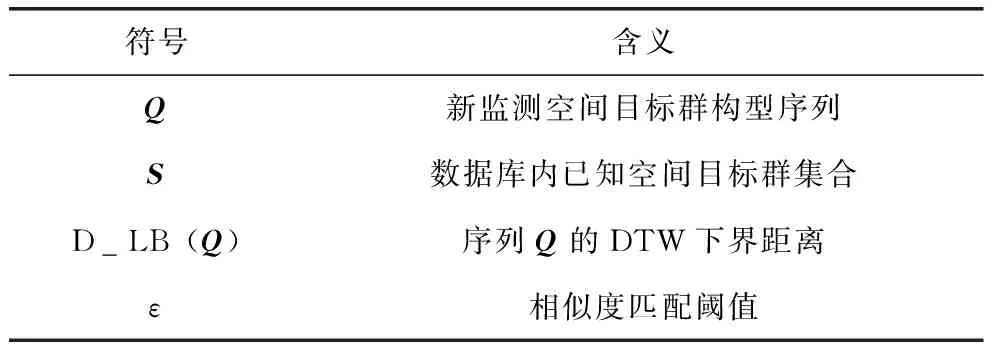
表1 伪代码中符号含义
3.3 阈值选择
在计算获取新监测空间目标群构型序列Q与数据库内已知空间目标群集合的相似度后,通过设置合理的阈值对最优相似匹配结果进行筛选,若满足阈值条件则将新目标群监测数据更新至数据库内相应目标群构型序列中,否则将其视为新发射入轨空间目标群更新至数据库。
通常相似度匹配阈值区间选择应根据历史经验,综合利用优化算法确定合理高效的阈值,保证序列匹配识别的效率,实现对空间目标群的实时识别管理。
4 仿真验证
4.1 仿真数据生成
为验证基于DTW算法的空间目标群匹配识别效果,本文选取2022年~2023年之间发射入轨的某10批星链TLE数据开展仿真计算,星链卫星TLE数据选取情况如表2所示。
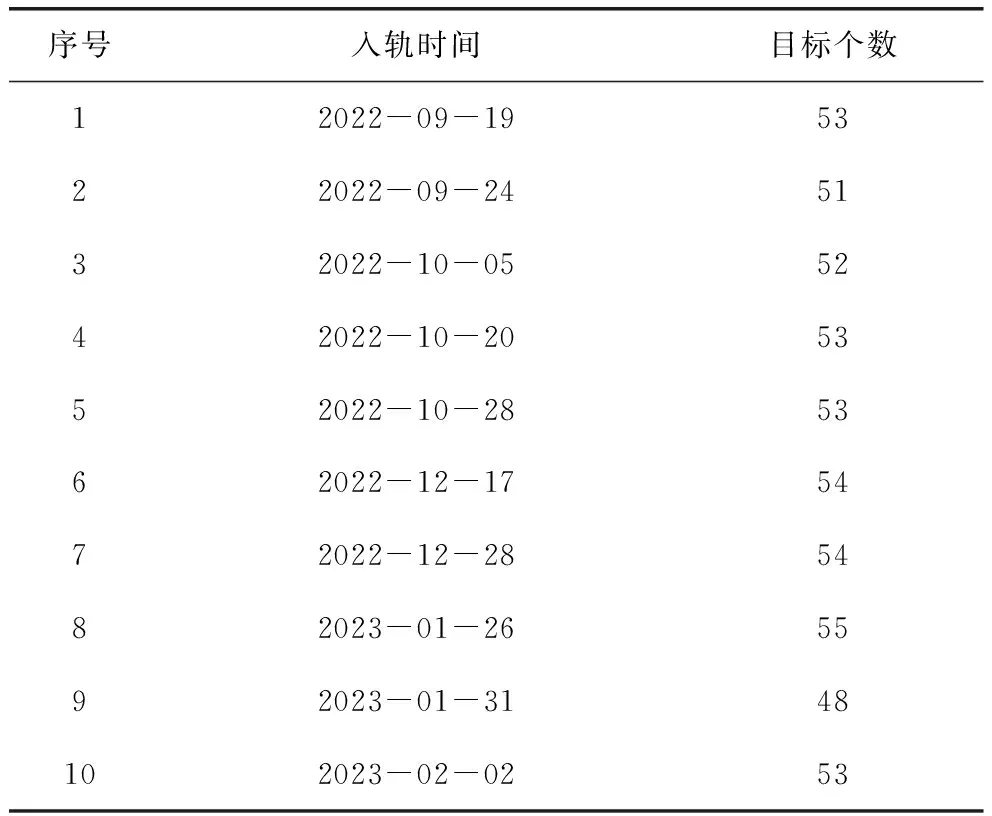
表2 星链卫星TLE数据选取情况
通过仿真计算,模拟出每批次星链中所有卫星在其发射入轨一周内的飞行数据,样本选取时间具备一定的连续性,各批次星链入轨卫星数量基本相同。本文使用的飞行数据为目标位地固坐标系下的位置信息,为模拟地基雷达对目标群的监测情况,选取数据时同批次各弧段之间时间间隔约为2 h,弧段长度为数据点数300~600、数据率为1 s,仿真测量误差与相应地基装备测量误差一致。
4.2 实验结果
地基雷达在监测空间目标群过程中,受到各种环境因素影响,可能导致目标监测数量缺失,这一现象在目标入轨初期尤为明显,随着目标群逐渐展开得到改善。
结合实际监测情况,本文在匹配识别前对目标群空间构型序列进行缺失模拟,分别设置四种缺失情况:无缺失、随机缺失5%、随机缺失10%、随机缺失30%,采用DTW算法依次对目标群空间构型序列开展匹配识别。
4.2.1 无缺失条件下匹配识别情况
在无缺失条件下,各批次星链目标群匹配识别情况如表3所示。

表3 无缺失条件下星链卫星匹配识别结果
表3中,群匹配成功率指空间目标群成功匹配的概率,识别成功率指群内目标成功身份识别的概率。
以第一批次为例,其相似度计算结果如图5所示,相似度值越低表示与匹配序列之间差别越小,匹配序列越相似。从图中可以看出,目标入轨一周内其群状态可准确识别。

图5 无缺失条件下第一批次相似度计算结果
4.2.2 随机缺失5%条件下匹配识别情况
在随机缺失5%条件下,各批次星链目标群匹配识别情况如表4所示。第一批次目标群相似度计算结果如图6所示。

表4 随机缺失5%条件下星链卫星匹配识别结果
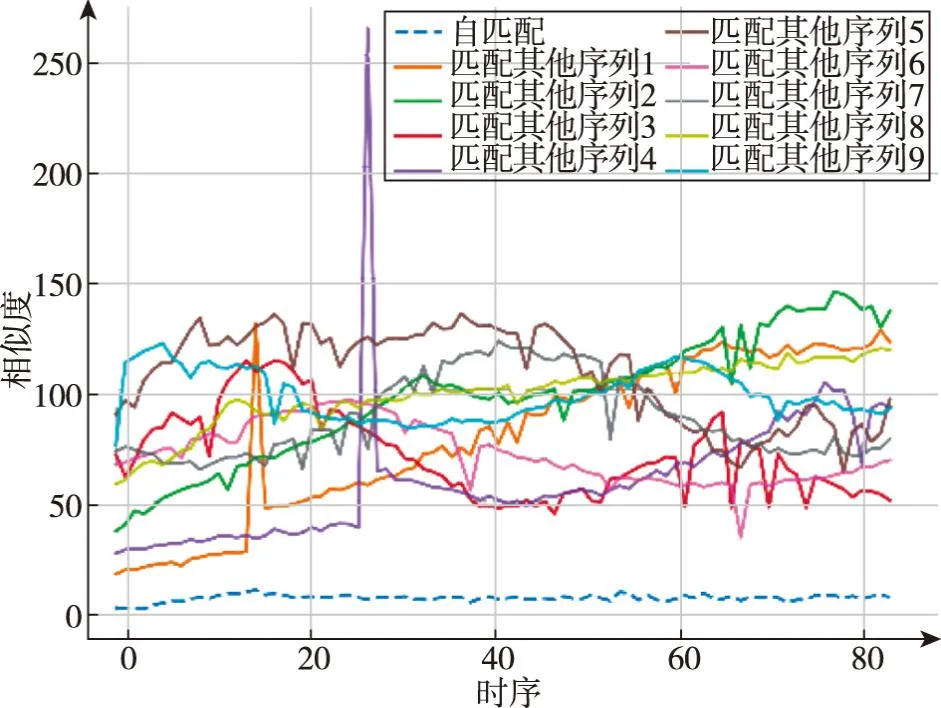
图6 随机缺失5%条件下第一批次相似度计算结果
4.2.3 随机缺失10%条件下匹配识别情况
在随机缺失10%条件下,各批次星链目标群匹配识别情况如表5所示。第一批次目标群相似度计算结果如图7所示。
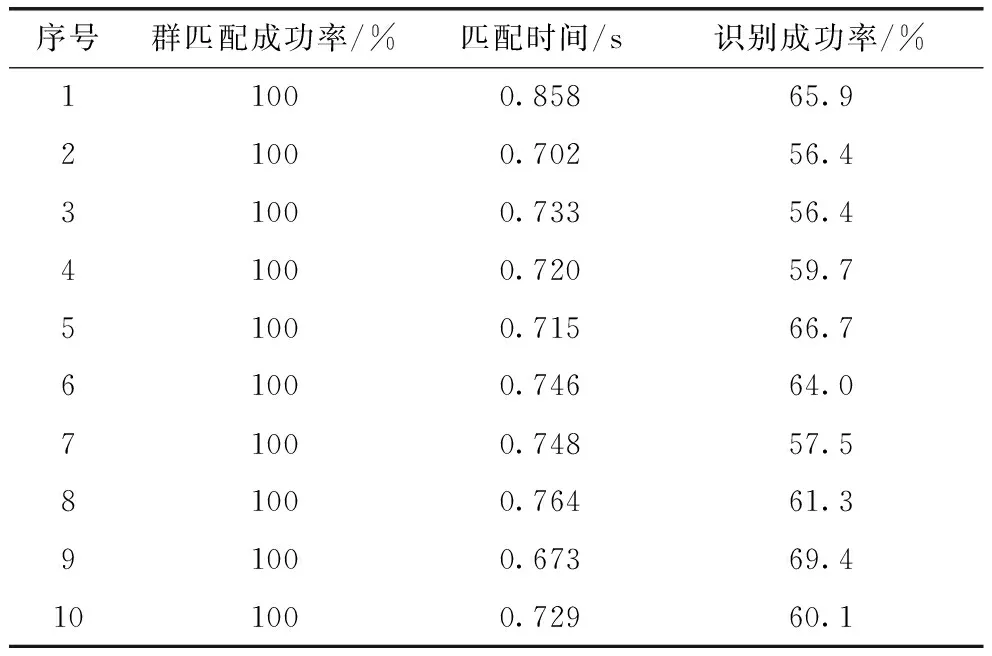
表5 随机缺失10%条件下星链卫星匹配识别结果
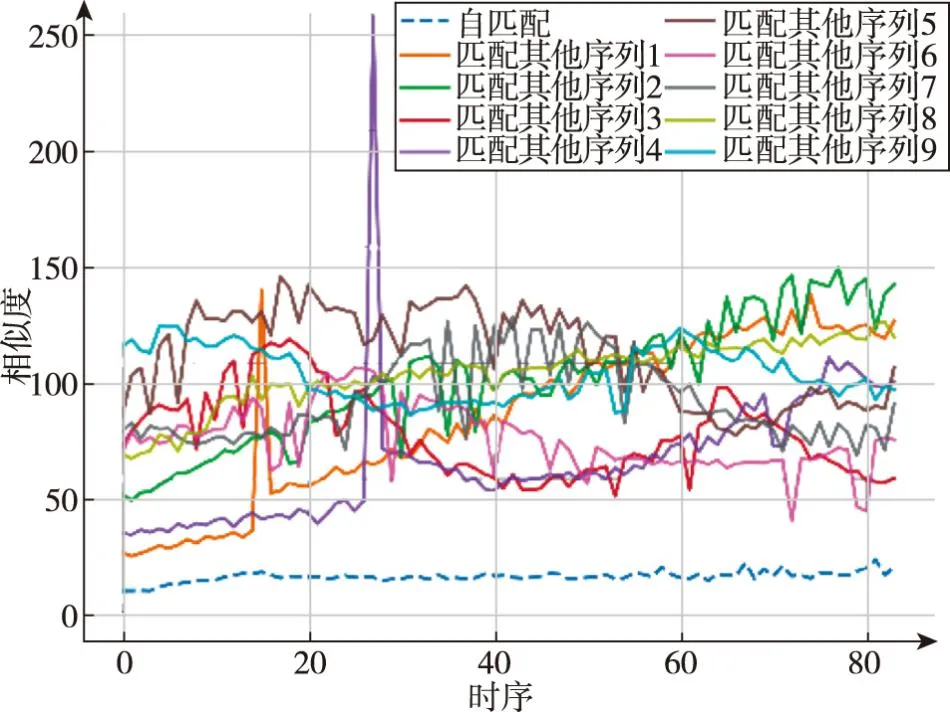
图7 随机缺失10%条件下第一批次相似度计算结果
4.2.4 随机缺失30%条件下匹配识别情况
在随机缺失30%条件下,各批次星链目标群匹配识别情况如表6所示。第一批次目标群相似度计算结果如图8所示。
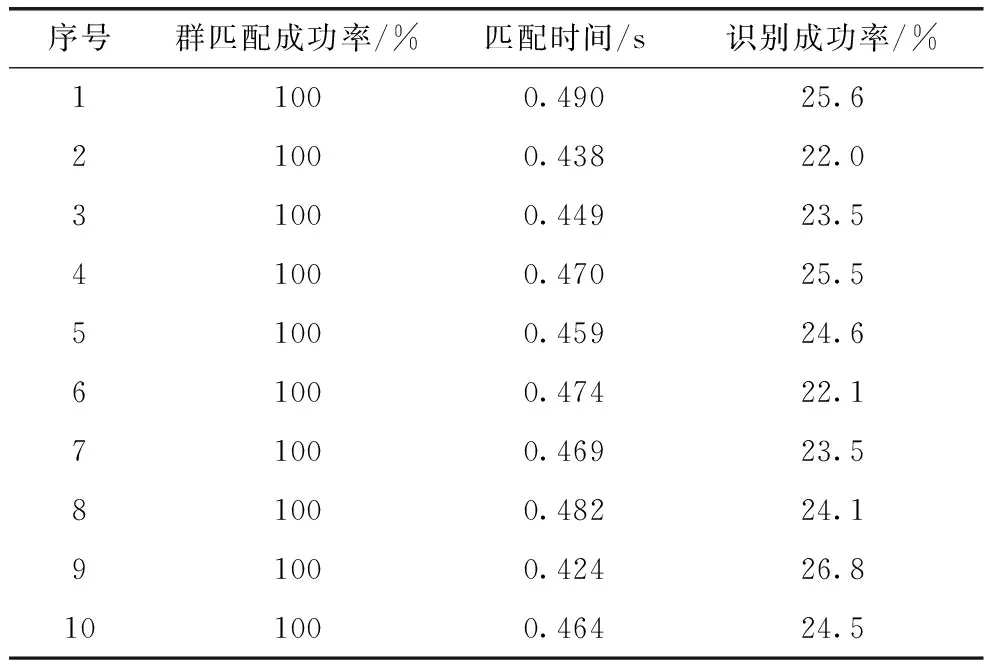
表6 随机缺失30%条件下星链卫星匹配识别结果

图8 随机缺失30%条件下第一批次相似度计算结果
4.3 结果分析
综合分析仿真实验结果,DTW算法可以高效地将空间目标群监测数据与现有空间目标群进行匹配,匹配成功率稳定,匹配时间短,具备实时匹配识别能力,证明了DTW算法在空间目标群匹配识别上的适用性和高效性。
结合四种缺失条件下的匹配识别结果,可知匹配时间与目标群监测完整性呈正相关,即监测获取群内目标个数越多,匹配时间越长。同时,群内目标识别成功率随着目标缺失比例上升而逐渐下降,算法在高缺失条件下的目标身份识别仍需要改进,在群内目标存在大面积缺失时算法对目标群的身份识别成功率低。
5 实测数据检验
为将算法推广应用于空间目标群实测数据,验证算法工程应用效果和匹配识别性能,本文选用多型雷达对星链目标的实测数据进行空间目标群匹配识别。
5.1 实验结果
本文选取某三批次星链目标入轨后24 h内的连续两圈次地基雷达实测数据,数据为站址坐标系下的方位俯仰距离信息,经坐标转化、混批错批判断和误差修正等预处理后,提取出有效观测弧段,并使用本文算法将目标群监测数据转化为相应空间构型序列,各批次实测数据空间构型序列如图9所示。

图9 各批次实测数据空间构型序列
数据选取匹配情况及相似度计算结果如表7、表8所示。

表7 星链实测数据选取及匹配情况

表8 实测数据相似度计算结果
5.2 匹配能力分析
本次验证数据选取不同批次星链星座入轨后一段时间内的监测数据,计算结果表明,不同空间目标群构型序列之间相似度存在明显差异,可通过相似度匹配计算实现对空间目标群的稳定高效匹配识别。
通常星链星座每批次发射入轨卫星数量在40~60颗,从表7数据可知,监测数据存在一定缺失,验证了在实际跟踪监视过程中目标存在丢失的情况下,算法仍具备较为稳定的匹配识别能力。
最后,当前对发射入轨早期的星链星座目标编目定轨、精准预报存在较大的困难,主要原因之一即为多点位监测数据难以匹配。本文通过相似性度量,对各弧段监测数据匹配识别,可为后续精密定轨提供数据支撑,提高对早期入轨的空间集群目标的编目管理能力。
6 结束语
本文针对空间目标群编目管理过程中的难点问题,提出了基于时序向量相似性的空间目标群匹配技术,通过将地基雷达监测时序向量数据降维获取目标群构型序列,采用DTW算法对空间目标群监测数据序列进行相似度计算,本文结合目标群构型动态扩散的特点,提出动态时间修正因子,对相似度进行修正,提升了对动态扩散目标群的匹配识别能力。经实测数据验证表明,本文提出的基于DTW的空间目标群匹配识别算法准确率高、时效性好,在群内目标不存在严重缺失的情况下具备对目标身份识别的能力。但由于目标群运行状态复杂,算法在目标大量缺失条件下群目标身份识别准确率降低,难以快速完成后续群目标关联匹配工作,下一步将继续深入研究关联匹配算法,完善算法在群内目标大量缺失条件下的身份准确识别能力,优化空间目标群编目管理工作。
猜你喜欢
百科探秘·航空航天(2022年2期)2022-01-26
太空探索(2021年5期)2021-05-17
太空探索(2021年3期)2021-03-19
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
小学科学(学生版)(2020年8期)2020-08-24
铁道通信信号(2019年11期)2019-05-21
北京航空航天大学学报(2017年10期)2017-04-20
振动工程学报(2015年1期)2015-03-01
全球定位系统(2015年4期)2015-02-28
航天返回与遥感(2014年4期)2014-07-31
